







 在进行机械臂导航时,遇到逆运动学求解问题,即使已知末端执行器位姿参数也无法得到逆解。尝试配置ikfast未果,通过下载并测试URDF文件能成功求解。解决问题的关键包括:修复package.xml中作者邮箱,删除base_link的inertia标签,调整roslaunch文件以匹配需求,并使用my_robot_arbotix_ok.launch文件作为ikUrdfArbotix.launch的基础。同时,关注joint_states话题中的position和velocity信息。
在进行机械臂导航时,遇到逆运动学求解问题,即使已知末端执行器位姿参数也无法得到逆解。尝试配置ikfast未果,通过下载并测试URDF文件能成功求解。解决问题的关键包括:修复package.xml中作者邮箱,删除base_link的inertia标签,调整roslaunch文件以匹配需求,并使用my_robot_arbotix_ok.launch文件作为ikUrdfArbotix.launch的基础。同时,关注joint_states话题中的position和velocity信息。
参考的资料有:
1、KUKA youbot机械臂与Moveit工具包(2):http://blog.csdn.net/yaked/article/details/45621517
2、如何利用ROS MoveIt快速搭建机器人运动规划平台:https://www.leiphone.com/news/201612/nxlXgriSLasNgAcX.html?viewType=weixin
3、ROS 运动规划 (Motion Planning): MoveIt! 与 OMPL:http://blog.csdn.net/improve100/article/details/50619925
4、ros论坛:https://answers.ros.org/question/240723/fail-aborted-no-motion-plan-found-no-execution-attempted/
一、逆运动学求解遇到的问题
1、给出末端执行器的位姿参数,就是position(x,y,z)、orientation(x,y,z,w)在确定位置可达的情况下还是无法求出逆解。Fail: ABORTED: No motion plan found. No execution attempted

2、博客资料里说的方法都尝试过,包括配置ikfast,但是我跟博客作者一样没有配置成功,后来从"ROS 运动规划 (Motion Planning): MoveIt! 与 OMPL"下载了urdf文件,进行配置测试,发现可以求解逆运动学,于是我开始新建一个机械臂的urdf文件。
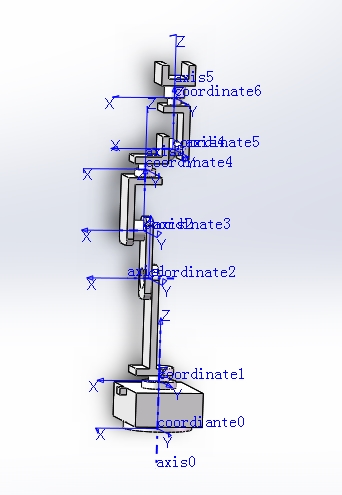
1、用SolidWorks建立一个6自由度的机械臂模型,并且通过urdf插件生成ik_urdf包。
需要注意的是:link、joint坐标系设置尽量满足所有关节为0°时候,所有坐标系同姿态(这样可以避免引入pi)

三、通过moveit设置助手生成moveit配置文件ik_urdf_moveit_config
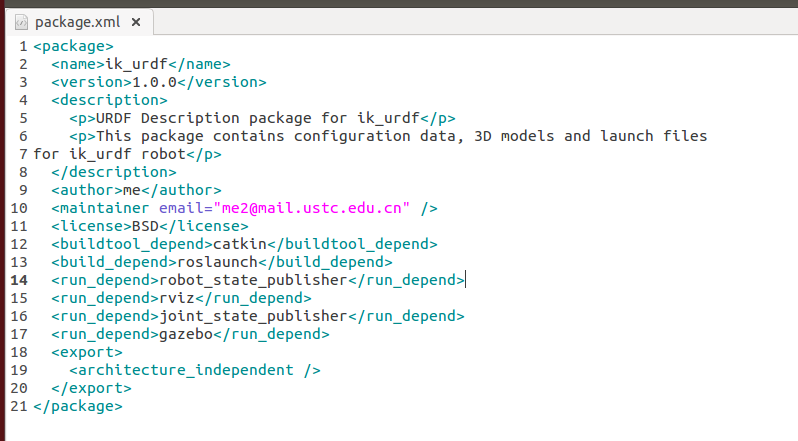
1、 修改package.xml的作者邮箱信息,原来的邮箱格式不正确
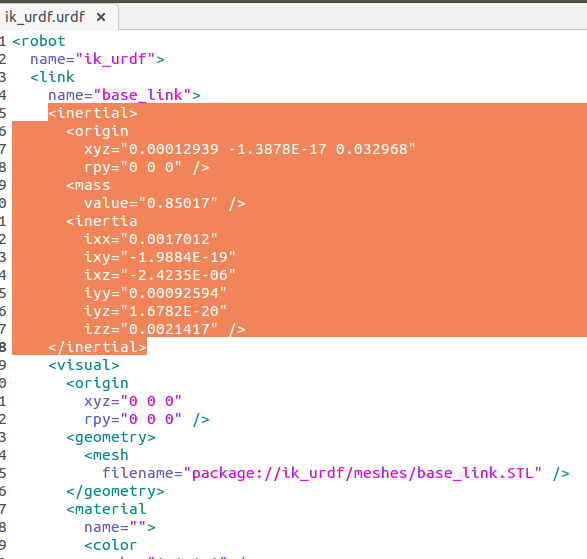
2、 删除urdf文件中base_link的inertia标签,base_link不需要定义惯性属性
3、 根据需要roslaunch的文件做一些文件目录的修改(比如做机械臂导航时遇到的问题2:solidworks用sw_urdf插件生成urdf文件包后,需要修改的部分)
(4.1) 新建启动arbotix节点文件:ik_urdf_arbotix.launch文件
我们将(做机械臂导航时遇到的问题7:正向运动学求解:在关节空间进行规划)中的my_robot_arbotix_ok.launch文件复制到urdf包内的launch文件夹下,命名ik_urdf_arbotix.launch,修改完成后的代码如下:
<launch>
<!-- Make sure we are not using simulated time -->
<param name="/use_sim_time" value="false" />
<!-- Launch the arbotix driver in fake mode by default -->
<arg name="sim" default& 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 2201
2201

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









