






最近在看电机控制物理方程转换为复矢量后使用根轨迹工具来判定系统稳定性,其中使用到了两个工具,一个是根轨迹表示法;一个是频响函数;
关于根轨迹表示法在《自动控制原理》中有讲述,其核心要点总结如下:
1、根轨迹的极点就是当开环增益增加时闭环系统特征方程的根;
2、极点位于S域左半平面时系统无论增益有多大都是稳定的,如果极点落在虚轴上,系统是临界稳定的,落在右半平面的话,系统是不稳定的。
3、使用根轨迹工具可以让多输出的电机控制方程(比如dq轴的电压方程)变为单输入单输出的系统,从而便于对系统进行控制;
4、由于实际物理系统常常是多阶系统,通过采用一定的措施,如零极点对消,把系统的阶数降低,变为一阶定常系统是控制的目的;
5、求根轨迹就是求闭环系统的极点,理想情况是只有一个极点,系统稳定于闭环系统的该极点位置;求闭环系统的极点,就是求闭环传递函数特征方程的根。
6、极点越靠近s平面的左半平面系统越稳定,反之,系统越不稳定;
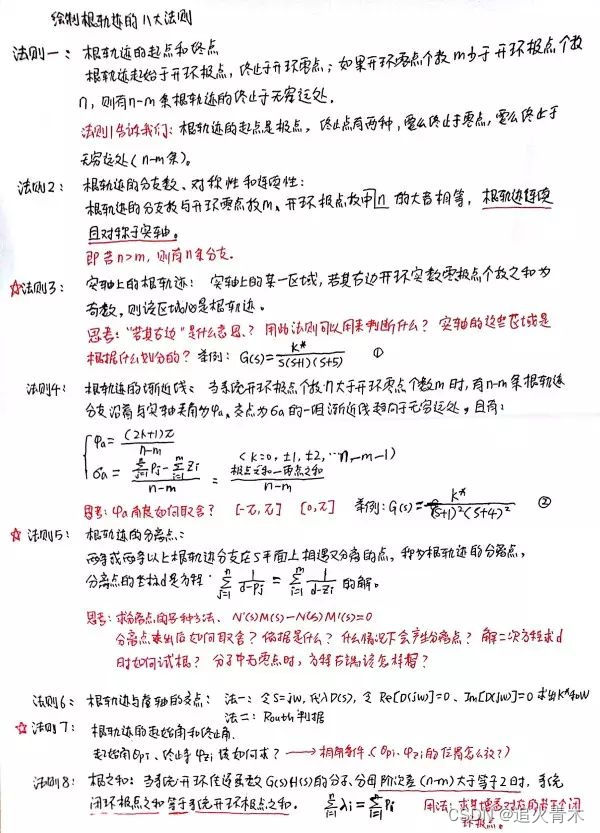
如何画出根轨迹图,可以按照下面的几条法则来进行:















 2753
2753











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









