







cartographer详解专栏综述
摘要:主要说明此专栏的主要讲解内容,后续文章如何展开。方便自己做规划,也方便读者快速了解此专栏的内容,也可以作为目录导航。
一、主要模块分类
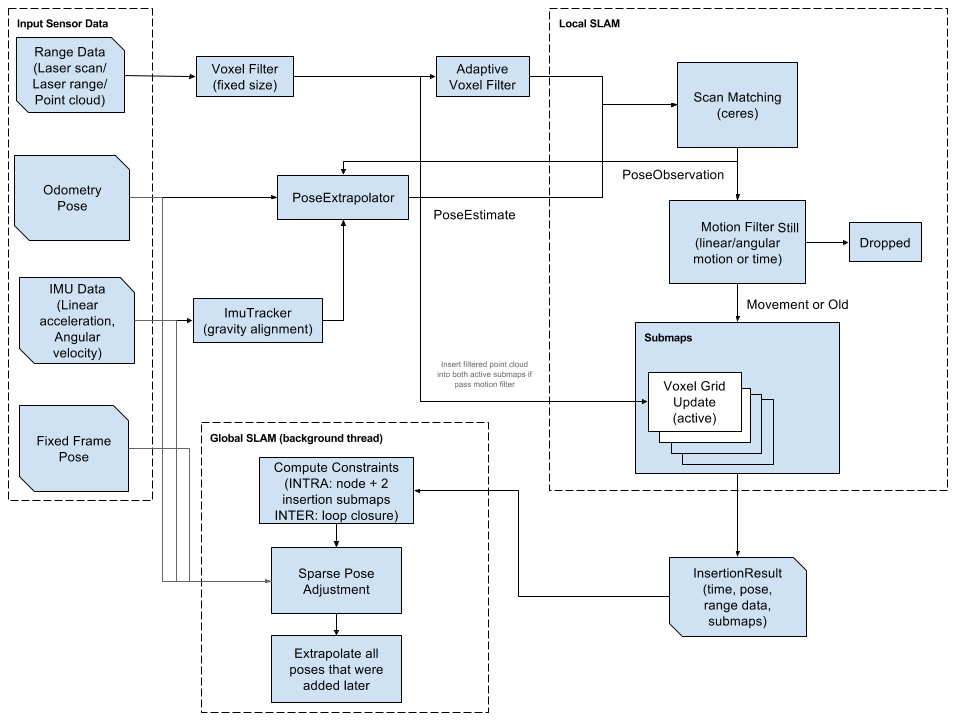
根据官方架构图,也为了尽量方便的阐述问题,又不至于太散,后续文章打算分成如下四大块:
- 传感器以及数据处理
- Local SLAM
- Global SLAM
- 相关程序语言
二、行文思路
刚开始接触cartographer的时候,发现很多文章都是贴上大段代码,然后间断性的说明,让刚开始接触的我摸不着头脑。当然我现在也是新手,写文章的目的一是方便交流,给社区贡献点力量,另外主要作用还是想通过输出的方式,加强对输入的理解。所以,推己及人,我这里尽量写的对新手友善些。每篇文章的行文思路:
- 先讲主要目的,给人一个宏观的概念
- 然后精简的分析原理,理清背后的理论逻辑
- 然后在辅助性的讲解下代码,看下如何工程实现
通过这三步的循序渐进,应该就可以入门了。
三、文章索引
先立个flag,计划用3个月的时间(定目标时间:2020.11.11),梳理出10篇文章,能把上述四大模块的主要内容覆盖到。














 524
524











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









