









 本文深入探讨了消失点的概念及其在计算机视觉中的应用,详细解释了如何通过消失点求解相机的旋转矩阵,这对于理解图像中的三维空间信息至关重要。
本文深入探讨了消失点的概念及其在计算机视觉中的应用,详细解释了如何通过消失点求解相机的旋转矩阵,这对于理解图像中的三维空间信息至关重要。
概念
- 消失点是两条平行的直线经透视变换会相交成一点,通俗来讲就是在现实世界中平行的两条线,在图像中相交的点,不再赘述。
- 消失线是由水平(或竖直)方向上的消失点组成的线。

消失点的性质:
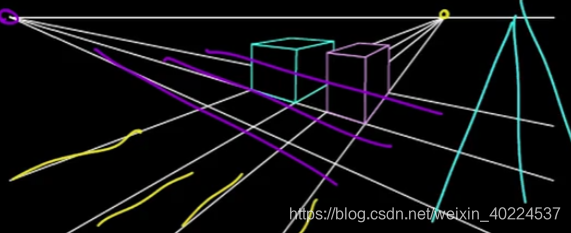
消失点与光心的连线,平行于形成该消失点平面的平行线。所以在空间中互相垂直的几组平行线,对应的消失点与相机光心的连线也互相垂直。如图所示。
求解
假设 p i p_i pi是消失点对应的像素坐标系,K是内参矩阵,R是旋转矩阵, X i X_i Xi是消失点对应的世界坐标系。对应求三个参数需要三个消失点联立成三个方程进行求解。
求对应的旋转矩阵 R = [ R 1 , R 2 , R 3 ] R=[R_1,R_2,R_3] R=[R1,R2,R3],把右侧消失点与光心的连线作为X轴,对应的世界坐标系为 [ 1 , 0 , 0 ] [1,0,0] [1,0,0],把左侧消失点与光心的连线作为Z轴,对应的世界坐标系为 [ 0 , 0 , 1 ] [0,0,1] [0,0,1],把竖直方向的消失点与光心的连线作为Y轴,对应的世界坐标系为 [ 0 , 1 , 0 ] [0,1,0] [0,1,0],则求解方程为:
①
V
P
R
i
g
h
t
=
K
[
R
1
,
R
2
,
R
3
]
[
1
,
0
,
0
]
T
VP_{Right}=K[R_1,R_2,R_3][1,0,0]^T
VPRight=K[R1,R2,R3][1,0,0]T
②
V
P
L
e
f
t
=
K
[
R
1
,
R
2
,
R
3
]
[
0
,
0
,
1
]
T
VP_{Left}=K[R_1,R_2,R_3][0,0,1]^T
VPLeft=K[R1,R2,R3][0,0,1]T
③
V
P
T
o
p
=
K
[
R
1
,
R
2
,
R
3
]
[
0
,
1
,
0
]
T
VP_{Top}=K[R_1,R_2,R_3][0,1,0]^T
VPTop=K[R1,R2,R3][0,1,0]T

















 3122
3122

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









