









参考文献
Sychronous Machines Theory and Performances – Charles Concordia
数学推导
以下图的同步电机作为示意,介绍相间互感的计算方法。
基本思路:双反应理论,即a相在dq轴产生的磁动势,dq轴的磁动势在dq轴产生的磁通,分别在b,c相交链的磁链。

- a相在d轴产生的磁动势:
m m f a d = N i a cos θ a mmf_{ad}=Ni_a\cos \theta _a mmfad=Niacosθa - a相在q轴产生的磁动势:
m m f a q = − N i a sin θ a mmf_{aq}=-Ni_a\sin \theta _a mmfaq=−Niasinθa - d轴磁动势产生的磁通被b相交链的磁链:
ψ a b d = N ∗ k ∗ m m f a d ℜ max cos θ b θ b = θ − 2 3 π \psi _{abd}=N*k*\frac{mmf_{ad}}{\Re _{\max}}\cos \theta _b \\ \theta _b=\theta -\frac{2}{3}\pi ψabd=N∗k∗ℜmaxmmfadcosθbθb=θ−32π
其中k为绕组系数,与电机设计有关。 - q轴磁动势产生的磁通被b相交链的磁链:
ψ a b q = N ∗ k ∗ m m f a q ℜ min sin θ b \psi _{abq}=N*k*\frac{mmf_{aq}}{\Re _{\min}}\sin \theta _b ψabq=N∗k∗ℜminmmfaqsinθb - ab间互感计算:
ψ a b d = k N 2 ℜ max i a cos θ cos ( θ − 2 3 π ) ψ a b q = k N 2 ℜ min i a sin θ sin ( θ − 2 3 π ) L a b = ( ψ a b d + ψ a b q ) / i a L a b = k N 2 ℜ max cos θ cos ( θ − 2 3 π ) + k N 2 ℜ min sin θ sin ( θ − 2 3 π ) \psi _{abd}=\frac{kN^2}{\Re _{\max}}i_a\cos \theta \cos \left( \theta -\frac{2}{3}\pi \right) \\ \psi _{abq}=\frac{kN^2}{\Re _{\min}}i_a\sin \theta \sin \left( \theta -\frac{2}{3}\pi \right) \\ L_{ab}=\left( \psi _{abd}+\psi _{abq} \right) /i_a \\ L_{ab}=\frac{kN^2}{\Re _{\max}}\cos \theta \cos \left( \theta -\frac{2}{3}\pi \right) +\frac{kN^2}{\Re _{\min}}\sin \theta \sin \left( \theta -\frac{2}{3}\pi \right) ψabd=ℜmaxkN2iacosθcos(θ−32π)ψabq=ℜminkN2iasinθsin(θ−32π)Lab=(ψabd+ψabq)/iaLab=ℜmaxkN2cosθcos(θ−32π)+ℜminkN2sinθsin(θ−32π)
系数代换得:
L a b = P d cos θ cos ( θ − 2 3 π ) + P q sin θ sin ( θ − 2 3 π ) L_{ab}=P_d\cos \theta \cos \left( \theta -\frac{2}{3}\pi \right) +P_q\sin \theta \sin \left( \theta -\frac{2}{3}\pi \right) Lab=Pdcosθcos(θ−32π)+Pqsinθsin(θ−32π)
利用积化和差公式:
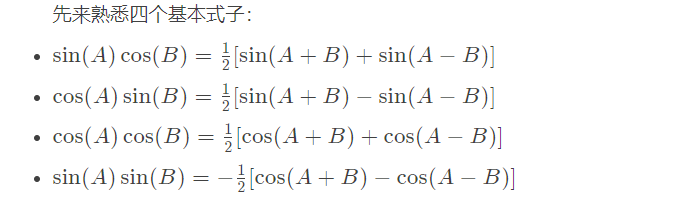
- 化简互感计算:
L a b = P d cos θ cos ( θ − 2 3 π ) + P q sin θ sin ( θ − 2 3 π ) L a b = P d 1 2 [ cos ( 2 θ − 2 3 π ) + cos 2 3 π ] + P q − 1 2 [ cos ( 2 θ − 2 3 π ) − cos 2 3 π ] L a b = P d 1 2 [ cos ( 2 θ − 2 3 π ) − 1 2 ] + P q − 1 2 [ cos ( 2 θ − 2 3 π ) + 1 2 ] L a b = − P d + P q 4 + ( P d − P q 2 ) cos ( 2 θ − 2 3 π ) L_{ab}=P_d\cos \theta \cos \left( \theta -\frac{2}{3}\pi \right) +P_q\sin \theta \sin \left( \theta -\frac{2}{3}\pi \right) \\ L_{ab}=P_d\frac{1}{2}\left[ \cos \left( 2\theta -\frac{2}{3}\pi \right) +\cos \frac{2}{3}\pi \right] +P_q\frac{-1}{2}\left[ \cos \left( 2\theta -\frac{2}{3}\pi \right) -\cos \frac{2}{3}\pi \right] \\ L_{ab}=P_d\frac{1}{2}\left[ \cos \left( 2\theta -\frac{2}{3}\pi \right) -\frac{1}{2} \right] +P_q\frac{-1}{2}\left[ \cos \left( 2\theta -\frac{2}{3}\pi \right) +\frac{1}{2} \right] \\ L_{ab}=-\frac{P_d+P_q}{4}+\left( \frac{P_d-P_q}{2} \right) \cos \left( 2\theta -\frac{2}{3}\pi \right) Lab=Pdcosθcos(θ−32π)+Pqsinθsin(θ−32π)Lab=Pd21[cos(2θ−32π)+cos32π]+Pq2−1[cos(2θ−32π)−cos32π]Lab=Pd21[cos(2θ−32π)−21]+Pq2−1[cos(2θ−32π)+21]Lab=−4Pd+Pq+(2Pd−Pq)cos(2θ−32π)
令:
P d + P q 2 = L a , P d − P q 2 = L b \frac{P_d+P_q}{2}=L_a, \frac{P_d-P_q}{2}=L_b 2Pd+Pq=La,2Pd−Pq=Lb - 得到最终的互感计算公式:
L a b = − L a 2 + L b cos ( 2 θ − 2 3 π ) L_{ab}=-\frac{L_a}{2}+L_b\cos \left( 2\theta -\frac{2}{3}\pi \right) Lab=−2La+Lbcos(2θ−32π)















 1973
1973











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









