







A decentralized framework for simultaneous calibration, localization and mapping with multiple LiDARs
一个多激光雷达同时定位建图以及外参自标定的分布式框架
IROS, 2020
简要:
建立基于EKF分布式的框架以便处理每个 LiDAR,可以消除单点故障问题。同时估计车辆状态(即姿态和速度)和所有 LiDAR 外在参数。用了5个便宜的LiDAR,定位效果好,开源。
做分布式系统的原因:
1、基于性能考虑,使系统并行化;
2、基于鲁棒性考虑,一个平台挂了还能继续工作。
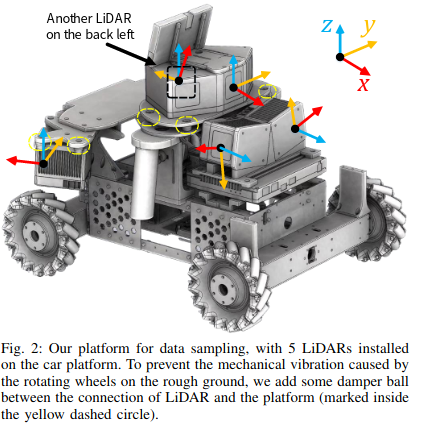
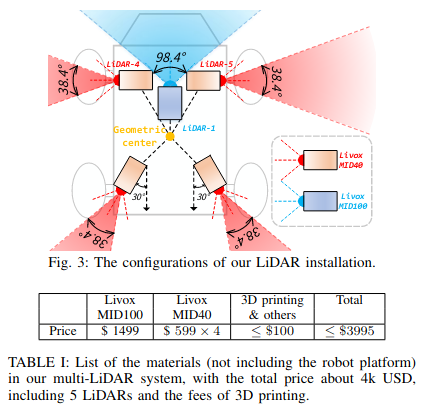
雷达的配置和FoV覆盖图和价格如上图。无重叠FOV,共有5个LiDAR,中间的蓝色的LiDAR的FOV大一些。此外硬件上可以支持3D打印,架构也开源了,而且对比发现五个Livox很便宜。
一、Vehicle model
1、Notation
T表示一个SE3的刚体转换,R,t 分别代表
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 6057
6057











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









