






 文章介绍了欧拉角的概念,作为机体坐标系与惯性坐标系转换中的角度参数,并详细阐述了两者之间的转换矩阵和角速度的关系。通过Z→Y→X的旋转顺序,给出了坐标变换的数学表达,并解释了为何不能直接用初始转换矩阵求解欧拉角速率与机体角速度的原因。
文章介绍了欧拉角的概念,作为机体坐标系与惯性坐标系转换中的角度参数,并详细阐述了两者之间的转换矩阵和角速度的关系。通过Z→Y→X的旋转顺序,给出了坐标变换的数学表达,并解释了为何不能直接用初始转换矩阵求解欧拉角速率与机体角速度的原因。
写在前面:这篇blog中如果有阐述或理解不对的地方请大佬在评论区批评指正,我将及时改正错误,谢谢!!!
首先需要介绍一下建立无人机数学模型时常说欧拉角。我的理解是:机体坐标系转换到惯性坐标系时每个坐标轴转动的角度,或者是从惯性坐标系转换到机体坐标系时每个坐标轴转动的角度。(对于机体坐标系和惯性坐标系不太懂得可以参考这篇blog惯性导航常用坐标系_Yule Yin的博客-CSDN博客_惯性坐标系)欧拉角的数学表达式通常为(),分别表示飞行器的滚转角、俯仰角和偏航角。在坐标轴上的形式如图1-1和1-2所示。
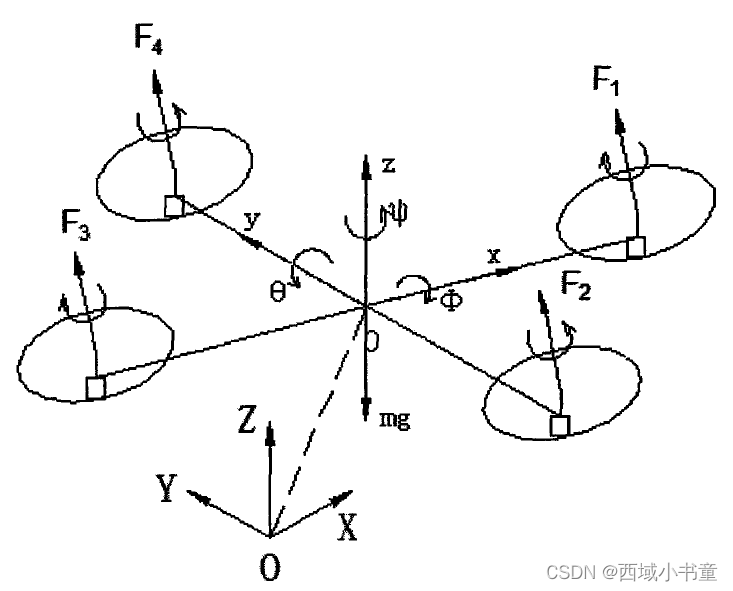
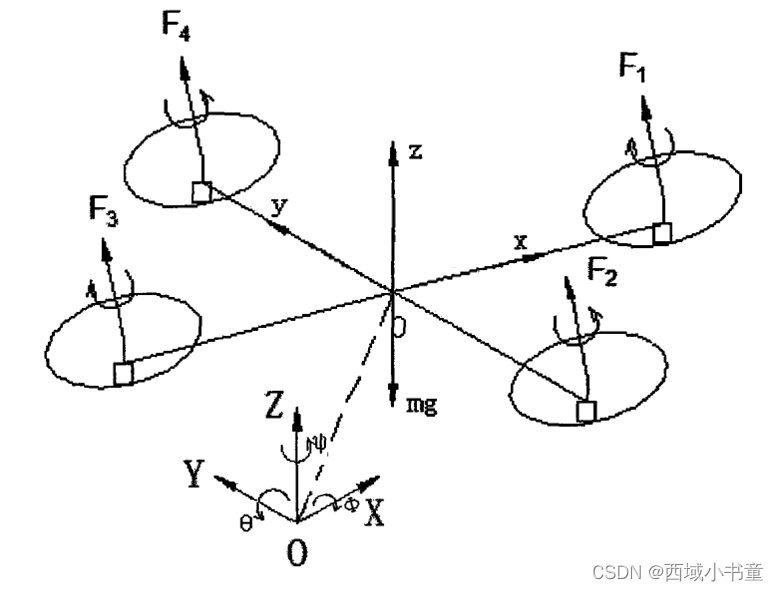
欧拉角介绍完了,下面介绍机体坐标系与惯性坐标系之间的转换关系。如上图1-1所示,从机体坐标系变换到惯性坐标系按照Z→Y→X顺序进行旋转,则转换矩阵如下(详细的推到过程可以参考无人机运动学控制中的坐标系,及惯性坐标系与机体坐标系之间的矩阵转换 欧拉角_龙行天下01的博客-CSDN博客_ned坐标系转换):

上述矩阵物理含义的是机体坐标系转换到惯性坐标系的过程,其逆矩阵表示从惯性坐标系到机体坐标系的过程。
最后就是介绍欧拉角速率与机体角速度的关系,这两者之间是无法直接使用上述的转换矩阵进行转换。欧拉角速率与机体角速度的转换关系的计算可以分为三步进行: (详细请参考欧拉角速率与机体角速度转换详细推导_韩婉仙的博客-CSDN博客_欧拉角速度和机体角速度)
这里按照比较常用的顺序,先绕Z轴旋转q6度,再绕Y轴旋转q5度,最后绕X轴旋转q4度(为了图一省事q6,q5,q4与上文欧拉角相同)。
设机体旋转角速率为:
ωb=[ωxb,ωyb,ωzb]T
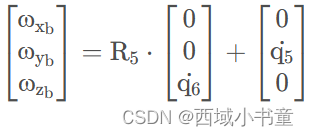
首先绕Z轴发生了一次旋转角速率表达式如下:

公式中零矩阵表示初始时机体坐标系的三个轴的角速度为0。
绕Y轴旋转时,此时绕Z轴旋转的角度也发生了改变,改变多少可以通过旋转矩阵获得,所以此时,角速率的表达式:
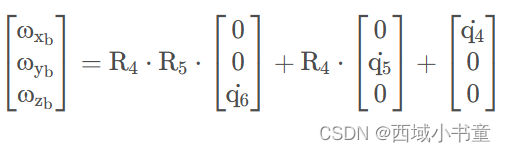
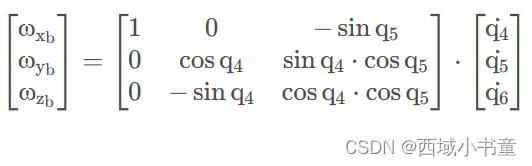
同理,在此基础上再进行最后一步旋转,即绕X轴旋转q4度,机体角速率的表达式如下:
最后经过化简后可以得到欧拉角速率与机体角速度的关系为:
上文中R6、R5和R4分别是坐标系变换的分步骤中的转换矩阵。
那么欧拉角速率和机体角速度之间为什么不能由文章最前面的的转换矩阵直接进行转换呢?我的理解是:沿着机体坐标的旋转轴转动时要加入所转轴的角速度(这里我可能理解错了,还需要大佬批评指正)。首先需要明白的是机体坐标系是变动的,而惯性坐标系是固定的,因此惯性坐标系的角速率与机体坐标的角速率是不同的。那么首先沿着机体坐标系的z轴转动的角速度为时,需要加上z轴转动的角速度为
其他轴角速度为0的矩阵。由于x轴和y轴的方向已经改变,这时需要乘以R6将x轴和y轴的的方向进行调整,然后再沿着y轴转动。同理再在y轴上加上角速度为
的矩阵,以此类推。最后通过化简等计算就可以得到欧拉角速率与机体角速度的关系矩阵。

















 2万+
2万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









