







创建一个工作区(workspace)
工作区可以作为一个独立的项目进行编译,存放ROS程序的源文件、编译文件和执行文件。建立工作区的方法如下:
$ mkdir -p ~/catkin_ws/src //创建文件夹
$ cd ~/catkin_ws/src //定位到src
$ catkin_init_workspace //对工作空间进行初始化虽然这时候工作区是空的,但是我们依然可以进行编译:
$ cd ~/catkin_ws/
$ catkin_make 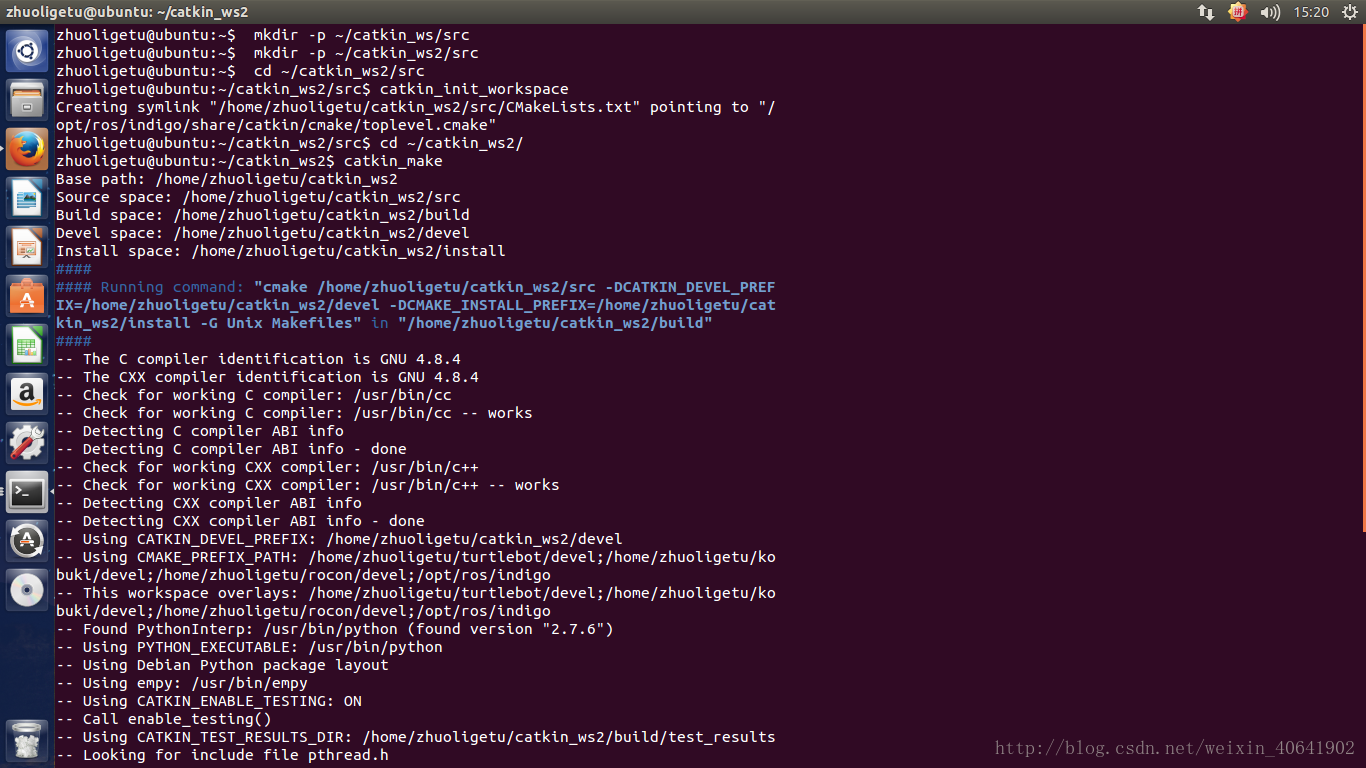
这时候,会在当前文件夹下生成devel,build这两个子文件夹,在devel文件夹下能看到几个setup.*sh文件。
接下来把工作区在bash中注册
$ source devel/setup.bash 要验证是否已经在bash中注册可以使用如下命令:
$ echo $ROS_PACKAGE_PATH
/home/youruser/catkin_ws/src:/opt/ros/indigo/share:/opt/ros/indigo/stacks 如果能看到自己工作区的文件路径就说明已经成功了。
创建一个ROS工程包(Package)
首先切换到工作区:
$ cd ~/catkin_ws/src 现在可以使用catkin_create_pkg命令去创建一个叫beginner_tutorials的包,这个包依靠std_msgs、roscpp、rospy。
》catkin_create_pkg beginner_tutorials std_msgs rospy roscpp 接下来在工作区编译这个工程包。
$ cd ~/catkin_ws
$ catkin_make 














 2094
2094

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









