







此文档记录从2021.05.08开始所有雷达信号处理方向的理解,可能会记得比较细碎,只是为了自己理解和学习,会持续记录
目录
2021.05.08
信号参数
bw,f0,tp(pw),fs,A,pri,snr,scr
1.脉冲宽度是时域上的信号长度,tp*fs是信号的点数
2.带宽是在中心频率两侧的宽度,在频域上能体现出
3.载频和中心频率是一个概念,在中心频率两侧是bw的概念,
4.fs采样的话,最好是大于2fmax,这样原始信号才能被完全的采出来
5.多普勒频率,2v/lamda,通过物体的相对运动产生多普勒频率,所以速度拖引干扰会改变多普勒频率
6.pri和prt是别名,是pri = 1.0/prf,一个pri里包括信号长度和空信号长度,空信号的长度
7.信噪比,snr,信杂比,scr,不是代表一个东西,信杂比认为,除了原始信号外的都是杂波,是处理信号以外的所有杂波的功率和信号的功率的比
信号波形样式
有连续波样式,有矩形的样式,有线性调频的样式,
1.线性调频的样式,只是调制了频率,让频率变为j*pi*br/tp*t^2*signOfChirpSlope,然后线性调频的频谱也会很有特点
2.谐波,代表的是主波束旁侧的平滑的小波束
信号处理
频谱分析fft,ifft,fftshift
1.一段信号如果,从频率不变,在频域里就是静止的,只有一条线
2.频谱上是显示信号的频率,在时域上可能看不清楚的信号样式,在频谱上都能看的清
3.ifft,从频域变成时域
干扰信号
有源信号、无源信号
噪声压制:宽带阻塞,窄带瞄准,函数扫频,梳状谱,间断噪声,随机脉冲,灵巧噪声
欺骗干扰:密集假目标,多普勒闪烁,多普勒噪声,转发干扰,多假目标,间歇采样假目标,速度拖引,距离拖引,距离速度联合拖引等
1.宽带阻塞干扰,干扰机的频率 > 5 *雷达接收机的频率
2.窄带瞄准干扰,干扰机的频率 > 2 * 雷达接收机的频率,干扰机的频率 < 5 * 雷达接收机的频率
3.函数扫频,有正弦扫频,三角扫频,锯齿扫频,阶梯扫频,矩形扫频,是指频率发生改变,频率的改变的形状是正弦,锯齿,阶梯,矩形等
4.梳状谱通过巴特沃斯滤波器滤掉多余的波形,然后保留的在频域上就是梳状的信号
5.间断噪声,使用滤波器滤掉多余的波,剩下的就是间断噪声的
6.随机脉冲,根据随机数生成随机的脉冲宽度,生个随机个数的脉冲
7.灵巧噪声,高斯白噪声数据滤波后,生成延迟信号,然后通过白噪声信号和延迟信号做卷积生成灵巧噪声信号
8.密集假目标,多假目标,根据假目标的位置计算卷积核,然后用原始信号回波进行卷积
9.距离,速度,距离速度联合拖引,距离是改变时间,速度是改变多普勒频率,联合的是同时改变速度和距离,注意这个速度和距离是需要改变的,得有个改变的速率控制
10.多普勒噪声,多普勒闪烁,多普勒闪烁是通过用户设置的干扰中频,然后让噪声信号在一定范围内闪烁出现,多普勒噪声是使用fir1改变时间序列
11.角度欺骗,需要两个以上的干扰源实现不同的闪烁
SAR成像
sar成像都是根据物体的相对运动,要么是雷达动,物体不动,要么是物体动,雷达不动,要么是都动
常见的有bp,rd成像算法,bp的效率很低
1.bp,首先进行脉冲压缩计算距离一维像,然后通过一维像(滤掉-4kpit),通过分辨率距离,对一维像进行相干叠加
RCS
雷达散射截面积
影响rcs的因素有三个,视角,频率,极化等
后散射系数为归一化后的rcs
仿真过程
仿真过程中,首先生成信号,然后会设置输出信号步长和输出信号的起始位置,然后进行输出
在设置仿真参数时候,分清仿真想定参数和,会实时变化的参数
分为发现方和被发现方,被发现方是辐射源方,发现方是散射源方,散射源方具有目标的回波和背景回波,背景回波可以分为地面回波和海面杂波,目标回波,根据目标的模型参数和视角,极化,频次等计算目标的rcs,
然后根据雷达公式进行生成回波,可以说回波会影响的参数有幅度和相位等,然后再有什么调频调相等参数;
信号分选
这里只是简单的看了下webrtc的代码,在modules/audio_processing/ns目录下,根据噪声信号的一些特征,预测是不是噪声信号,然后计算信燥比,然后把噪声信号和原始音频信号分出来
不太清楚是否信号处理都是这样
至此,就是2021.05.08的脑子里所有的知识的梳理,过程像一个流水账,但是以后会持续记录,记录编程过程中出现的问题,由于代码有保密机制,所以代码不会发
接下来,会进一步的补充和研究雷达系统设计matlab实现这本书,和雷达原理这本书,会记录不知道的问题和梳理知道的流程,争取在2022.04月成为一个合格的信号处理算法工程师
2021.05.10
辐射源、散射源、干扰、传输损耗的关系
辐射源是目标雷达
散射源包括,目标和典型的大地海面等的散射特性进行求解,建立散射数据库;
可以理解为辐射源为被动方,是目标;散射源为观察他的主动方,但是散射源观察到的不仅仅是目标,还有目标所处的环境,所以需要对所处的环境进行建模,求得他的rcs,计算其回波,所以干扰部分也会部署在辐射源的附近;
天线方向图是信号的在各个方向的增益,影响信号的幅度,传输损耗是信号在大气或各个天气中所带来的损耗,是负面增益;
今天不理解的处在于求一维距离像时,固定方位角,算一个宽带信号的散射特性???
2021.05.11
海杂波相关知识
由于海杂波是服从时间空间相关的,所以有效的选取海杂波模型就相关重要了
1.介绍k分布和伽马分布的相关关系如下网址:
https://www.docin.com/p-1557911235.html
2.介绍生成k分布的海杂波模型的网址如下:
https://wenku.baidu.com/view/5acd0a0a581b6bd97f19ea2e.html
3.各种杂波知道的建模需要考虑,幅度模型,后散射系数模型,频谱模型等等
然后,调制信号类型相关的,大多是调频
A*exp(phi+ phi2 + phi3 + .... )等等;
A各种杂波会服从一个分布,而phi1..等就是频谱分布
K分布是,首先有一个高斯分布,然后对这个高斯分布进行时间和空间的调制,然后得出一个三维数组?脉冲 栅格坐标 (x ,y)?
时间调制会影响多普勒?
空间调制会影响不同栅格的值?
计算出栅格需要求得每个栅格的后定散射系数,然后对此时的波束进行叠加。
若两个信号不具备脉冲间的相关性,就无法做距离脉压了?
了解到具有两个相关性的杂波的生成方法,先产生复高斯序列,再产生实高斯序列,然后对两种序列使用滤波器进行调制,这也就是SIRR方法。。。
极化知识
。。。
脉冲压缩
1.分辨率公式为 c / 2B 要想得到高距离分辨率可以用减少B来得到,但现实中会影响到雷达的工作,所以需要脉冲压缩的方法解决,脉冲压缩的办法有两种,
处理窄带或者中等带宽的脉压,使用匹配滤波器
(1)和脉冲压缩系数进行时域的卷积(2)和脉冲压缩系数进行频域的相乘,再做一步傅里叶变换得到
处理大带宽的脉压,使用去斜处理器
(1)雷达回波和发射的副本做混频(2)低通滤波器相干检波(3)模数转换(4)使用窄带滤波器提取与目标距离成正比的音频信号
2.时间带宽积,tp * B,一般未进行调制的信号的时间带宽积为1,通过频率或者相位调制的带宽积会大于1,这个参数是评估所选的压缩增益的好坏,压缩系数若偏离,压缩增益会小于B*tp,否则等于
3.压缩增益代表匹配滤波器增益
4.名词HRR代表高分辨雷达
5.距离补偿,主要是应对多普勒频率的,多普勒频率会对接收脉冲产生两个影响,第一个是脉冲宽度(tp)会被时间膨胀因子扩展或压缩,其次中频也会改变;所以要做距离补偿
在做目标检测时候,会做这个识别出有几个目标
2021.05.12
今天5.12,13年过去了
参数
1.载频特性,包括常规,频率捷变(脉内捷变,脉组捷变),频率分集(同时分集,分时分集)
2.重频特性,包括常规,重频参差(固定,组变),重频抖动
3.脉宽特征,包括常规,组变
4.雷达体制,包括脉冲,连续波,准连续波
5.调频类型,包括常规,调频(线性调频,三角调频,正弦调频,阶梯调频),调相(巴克码,M,L,泰勒四象码)
面杂波和体杂波
1.面杂波包括地杂波和海杂波这些
1.1无论计算的是面杂波还是体杂波,所需要的都是他们的rcs,然后通过雷达公式,以及rcs计算幅度功率P,然后通过Cos(2*pi*f*t + fuai)生成回波,而计算地杂波的rcs,可以等同于用大地散射系数和地杂波系数之和,以及栅格的面积乘积得到
1.2对于海杂波就比较麻烦了,由于海杂波的海面会动,所以海杂波系数会变化,地杂波的公式是高斯分布,海杂波的分布是K分布,所以那个海杂波的系数的K分布的值,但是每一个时刻K分布的值都不同啊,最笨的办法是每一个时刻都计算出一组数据
这块叙述的比较乱,只是自己的思路,可以得知,k分布的系数是凌驾于海面的视角,频次,极化信息等影响rcs的上一级
天线
天线在接收系统中,提供增益和方向性,天线是将电磁波转换为电信号的装置,
天线的常见的参数有,增益,频率覆盖,带宽,极化,波束宽度,效率;
增益是信号经过天线处理后增加的信号强度,常用dB表示。增益可正可负,各向同性天线增益为1,即0dB;
频率覆盖,天线可发射或接受信号,并提供适当参数性能的频率范围。
带宽,天线频率范围,常用百分比带宽表示,(最大频率 - 最小频率) / 平均频率 * 100%;
极化,发射或接受E波和H波的方位,主要又水平极化,垂直极化,右旋极化,左旋极化,或椭圆极化
波束宽度,天线的角的覆盖范围,通常以度表示,
效率,发射或接受信号的功率来自天线 波束覆盖球体部分的理论功率之比百分数。
2021.05.13
《雷达原理》读书笔记
1.测斜距,通过Tr * c / 2可以测距离
2.测角,指的是方位角和俯仰角,利用天线的方向性测得,雷达天线将电磁能量汇聚在窄波束内,当天线波束对准目标时候,回波信号最强,根据回波最强的天线波束指向,就可以确定目标的波束的方 向
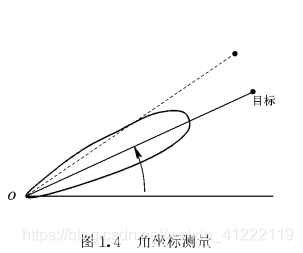
设目标位置为(tx,ty,tz),雷达位置为(rx,ry,rz),波速角度为theta,斜距为R
3.那么可以算得目标的角度为beta = asin(( ty - ry) / R) - theta;
4.相对速度(多普勒)的测量
fd = 2*vr / lamda; vr代表雷达和目标的径向速度,lamda代表的是波长
多用于MTI(动目标显示),脉冲卜勒(PD)等;
5.雷达的组成,天线,发射机,接收机,信号处理,终端等,如果将雷达比作人,那么发射机就是嘴巴,接收机就是耳朵,信号处理就是大脑的处理单元,终端就是大脑的成像,而天线可能就是手持的喇叭;
试想,肯定是声音越大,被人收到的就越清楚,所以会将信号调到高频,以此更好的传输,然后接受时候再调到低频,让信号更好的处理,了解信号的样式,信号的样式可以当做语调,愤怒的,高兴的,伤心的等等,让你发出这些情绪的就可以比作是激励器,
终端就是我们的思维本身,由此作出判断。可能说的不严谨不准确,就是为了记忆。
天线,天线的方向性越强,越能获得集中的较大的探测距离,要想天线的方向性强,就需要减窄波束的宽度,雷达探测的精度和分辨率就越高。常见的微波雷达的天线就是抛物面的反射体。天线目前我知道的有机械扫描,和相控阵那种的,相控阵是控制电流的流动来实现扫描
脉冲雷达收发并用,发射时发射开关开,天线与发射机相连接,
接收机里,有捡波器,捡波器分为包络检波器和相位检波器,做卜勒处理的话用相位捡波器,我理解的是包络捡波波器,捡到的是一个一个完整的波,而相位捡波器件捡到的是一定范围的相位
信号处理的目的是消除需要的信号,杂波或者干扰,通过或加强由目标产生的回波信号,信号处理是作出检测之前完成的,通常包括目标显示(MTI)和脉冲卜勒雷达中的卜勒滤波器。很多现代雷达,去杂波技术比较好,若输入端有杂波剩余,那么就用CFAR技术加以补救。
2021.05.14
杂波谱
静止杂波的功率谱可以用一个冲激函数来展现。但杂波并不是静止的,它实际上由于风速和天线的转动会发生一定程度的多普勒频率扩展,通常杂波几种在f=0和雷达PRF的整数倍处。
那么在生成杂波时候,这个多普勒是咋加进去的?
MTI和杂波抑制
动目标显示,是利用杂波集中在f=0,f=nprf,将此处的杂波通过特殊的滤波器进行消除,除此之外还会有盲速的概念,为了减少盲速,可以用多个脉冲重复频率(重频参差)和高PRF,后者容易产生距离模糊
2021.05.25
A/D变换
由模拟信号变成数字信号,雷达工作过程,先由激励器产生一定能量的波形信号后,通过A/D变化发出去,送到天线,产生天线增益加成发出去。然后过一段时间后,由天线接收后,通过杂波抑制,噪声放大,相位调制后,再转换原来的信号进行处理。
2021.06.02
雷达接收机组成
雷达接收机的组成由
前端部分:
收发开关、接收机保护器、低噪声高频放大器、混频器、高频放大器
中频部分:
中频增益衰减、中频滤波器
检波或视频放大器/AD变换:
不相参:a)对数放大器 b)线性放大器>同频检波器
相参 :c)线性放大器>同频检波器 d)限幅放大器>相位检波器
经过上述这些过程后,进入AD变换或者视频放大器。
重点说下这些放大器,都是可以选择对特定频段的频率增益增大
然后进行包络检波等分离出信号进行上位机等展示
雷达接收机的性能指标
1.噪声系数及噪声温度
噪声可以包括,电阻热噪声、额定噪声功率、天线噪声
其中天线热噪声影响最大,并且天线热噪声也是有起伏的,所以在做仿真时候,如果要求真实的场景可能要加上这个天线热噪声,这一块要和甲方进行商议;
噪声带宽
一般功率谱均匀的白噪声,经过接收机后就变得频率谱不均匀了,但是为了方便计算,通常把这个不均匀的噪声功率频谱等效噪音频谱宽度,一般简称噪声带宽。
一般计算这个噪声带宽有一个公式,都是根据调谐的数量所决定的。
噪声系数,一般用输入端的信号功率和输出端的信号功率之比,简称SNR
2.灵敏度
灵敏度表示雷达接收微弱信号的能力,能接收的信号越弱,则接收的灵敏度越强,因而雷达的作用距离就越远。
s = k*T0*Bn*F0*(S0/N0)
3.接收机的工作频带宽度
接收机工作频带带宽指的是接收机瞬时工作范围。接收机工作带宽主要影响的是高频带部件的性能。接收机工作带宽较宽时候,必须选择较高的中频,以减少混频器的寄生响应对接收机性能的影响。
4.动态范围
指的是,接收机正常工作所容许的输入信号变化范围,信号过强,会使接收机饱和负载,信号过弱,会使接收机检测不出来信号。为了增加范围,就需要有个增益电路,这就是增益控制。
5.中频选择和滤波特性
中频选择的大小,会决定噪声进去处理部分的多少;
白噪声的,接收机频率特性匹配滤波时,输出的信噪比最大;
6.工作稳定性和频率稳定度
环境条件和电源电压发生变化时候,接收机的性能参数也会发生变化。
7.抗干扰能力
从海浪地物反射的杂波和敌军放置的角反铂条等都会影响雷达的正常工作
8.微电子化和模块化的结构
现代相控阵雷达。
相控阵雷达的好处是
1)不用像机械扫描那样需要转动,仅需要控制电流等就可以实现扫描环境
2)同时可以发送多组信号,速度快
3)扫描域广
4)波束窄,扫描能力好
5)抗干扰
但是相控阵雷达有波束展宽效应,大概为1.0 / cos ( theta ) theta为方位角,一般用sin坐标系解决。
雷达接收机的增益控制
首先,增益控制可以解决,接收机接收范围的问题,上边已经叙述了,就不赘述了。然后其他,还可以解决增加抗干扰能力。
1.AGC
采用反馈技术,在输出信号后将自动增益电压发送到输出处,再进行中频放大,包络检波,视频放大等。
当输入信号增大时候,视频放大信号也增大,控制电压Eagc也变大,使受控中频放大器的增益降低,总体来说是个负反馈的系统。
2.IAGC
瞬时自动增益控制目的是,使干扰电压收到的衰减,维持目标信号增益尽量不变。
3.STC
防止近程的杂波干扰而过载。
滤波和接收机带宽
1.匹配滤波器
当输入端出现的是信号与加性白噪声时,使其输出的信噪比最大的滤波器。
对于接收机,匹配滤波器指的是,发射信号和输出信号
2.接收机带宽的选择
天线
将电信号,转成电磁波信号,不变形式的发出去。
1.天线指标
天线效率:
p1为辐射效率功率
p2为损耗功率
ya为效率
ya = p1 / (p1 + p2);
输入阻抗:
天线方向图:
1.主瓣和旁瓣的电平
表示同样远场距离r内,天线辐射场和空间方位之间的关系,这便是设计到方位角和俯仰角。
theta0,第一零点,零功率波瓣宽度
theta3db,主瓣最大值,其余的强度为0.707Emax
旁瓣电平:FSLL=10 lg(P2/P1) = 20lg(E2/E1)
2.方向系数
D = 120 | fmax| ^2 / P;
极化
分为线极化,左圆极化,右圆极化,椭圆极化;
极化描述的是电场的矢量运动变化,和空间方向有关系
以下的连接,可以很清楚的说明极化的效果,在我看来,极化就是电磁波传播过程的方向的合成轨迹??不知道其他小伙伴赞同不?
https://blog.csdn.net/qq_45020818/article/details/106226612
HH HV VH VV 等极化方式有啥不同??
HH HV VH VV 和极化的形式怎么合在一起??
天线增益
天线增益表征天线辐射能量的集束程度和能量转换效率的总效益;
在某方向点产生的相同电场强度的条件下,理想点源的输入功率pin0和某天线输出功率pin1的比值
G = 10 lgG;
天线频带宽度
方向图带宽
方向系数带宽
输入阻抗带宽
接收机的信号仿真要考虑的是:
1.背景杂波,海面,地面
2. 目标回波 这些回波都需要计算损耗,计算天线增益
接收机仿真过程,首先经过收发开关,然后进入到天线,获得天线增益,然后计算损耗,然后计算幅度,然后计算相位,然后计算信号,然后计算极化方向的信号,最后要考虑信号的形式,是单脉冲的形式,还是连续波,还是momo等,然后要收到后做高频噪声放大,然后转换到中频,然后通过中频放大器后,再过中频增益衰减,滤波器,最后再成像或者做其他操作,如航迹关联,航迹滤波,航迹预测等
雷达方程和RCS
P = P*G^2* lamda^2*xigema / (4*pi)^3 *R^4
P是发射功率,G是天线增益,lamda是波长,xigema是后定散射系数(RCS)
R是和目标的径向距离,这里注意如果不在一个坐标系下需要换到一个坐标系
但凡设计角度的都要考虑坐标系的问题
坐标系有,大地、地心直角、雷达直角(北天东、东北地)、雷达球面(方位俯仰和距离)
天线阵面直角,天线阵面球面等
接下来介绍rcs的测量过程
1.测试暗室的背景散射电平,并将改背景反射电平数据储存
2.放好定标体,测试反射电平
3.接测量得到的定标反射体反射电平减去暗室背景反射电平
4.放好被测目标,测试反射电平
5.将测试好的呗测目标反射电平减去背景反射电平
6.带入公式,求西格玛
7.旋转得到不同角度的西格玛
但测量过程中可能会有起伏,用swerling模型(斯维林模型)
在我看来,无论是目标还是以后关心到的杂波,最关键的是对他这个后定散射系数建模,然后这个后定散射系数的功率谱计算之后再通过公式计算出这个值,
现实中是通过雷达方程,先建模出一个物体的功率谱符合什么分布后,再通过雷达方程导出西格玛的大小???????这句话不知道是不是正确的
2021.06.04
雷达信号波形
距离分辨率:c / 2*B B是信号带宽
速度分辨率:lamda / 2 * tp
中频正交采样的实现办法:
1.低通滤波器
2.插值法
3.多相滤波法

















 1133
1133

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









