










SLAM总结(二)-数学基础之位姿表示
注:查阅了很多资料,因为时间有限,可能整理的不是很准确,先发出来,希望有大佬看了能指正一下,后期也会根据对算法的回顾,回过头来不断修正。
1.位姿的不同表达方式:位姿的表达方式是表达2个坐标系之间相对关系的数学方法,由旋转和位移组成。SLAM中一般有每帧传感器帧坐标系在世界坐标(世界坐标系的重要作用是提供一个统一的参考,坐标系的原点及姿态如何并不是特别重要,根据实际选定即可,如SLAM中原点一般以初始化成功的地方,可能在空间的任何地方)下的位姿Twc(待求状态变量)、两传感器帧之间的相对位姿。这里统一使用右手坐标系,表达方式如下:
1)变换矩阵,可以表示旋转和平移
旋转(姿态)R用3x3的正交矩阵(旋转矩阵)表示,具有3个自由度。位移t用3x1的列向量表示。为了简化计算通常将两者组合成(欧式)变换矩阵T,最后一列为4x1的齐次坐标,如下式所示。
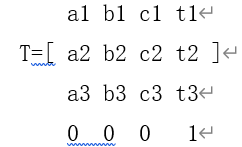
常见坐标表示TWC,Tcw(从左往右,从上到下)都表示从(from)C坐标系到(to)W坐标系的变换,以W作为参考坐标系,a、b、c分别是C的x、y、z轴在W中的向量,t是C的坐标原点在W的位置。对于相似变换S_WC中,sR为w坐标系下的非单位正交向量,t为c坐标系原点在w坐标系的坐标,尺度与w坐标系(参考坐标系)一样。
注:正交矩阵的性质
a)行向量、列向量的模都为1。
b)行向量、列向量两两相互正交,即点积(内积)为0
c)矩阵的转置等于矩阵的逆,即UTU=U-1U=I
d)正交矩阵相乘结果仍是正交矩阵,构成群
e)保范性:正交矩阵乘个向量,即(Ux)T(Ux) = xTUTUx = xTx
f)正交矩阵的特征值只能是1或-1
2)四元数:只能表示旋转,q=q_Rb表示R绕旋转轴u旋转θ角与b系重合
单位四元数q表示旋转,其形式为q=[q0,q1,q2,q3]T。q1,q2,q3为虚部,q0为实部。其约束是四元数的模为1。那么q的共轭(虚部取负)和逆相等。
纯需四元数[0,q1,q2,q3]T可以用于表示点,虚部对应点坐标3个元素
3)旋转向量(轴角,Axis-Angle):只能表示旋转
旋转向量θn表示旋转,其为3x1列向量,其方向与旋转轴(n,单位向量)一致,而长度等于旋转角(θ用弧度表示)。
4)欧拉角:只能表示旋转
欧拉角表示旋转,可以用3x1列向量[r,p,y]T表示。旋转被分解成先后沿坐标系3个不同轴旋转的转角,注意每次都是绕上一次旋转之后的坐标系的轴旋转,常见的旋转顺序(VINS-Mono使用)是z轴-旋转后y轴-旋转后x轴,偏航-俯仰-横滚(yaw-pitch-roll)。想象一架平飞的飞机,z轴由下往上,x轴从机尾向前,根据右手系可得到y轴,这样正好与偏好、俯仰和横滚的中文含义对上。欧拉角一个重大缺点是万向锁问题,在俯仰是正负90度时,第三次旋转的x轴与第一次旋转的z轴在物理空间上重合,那么第三次少转几度,第一次多转相同度数和原来结果是一样的(用手比划一下就知道了),因此第三次或第一次只需转一个即可,这样由3个自由度变成了2个自由度,成为奇异性问题。3维旋转是3维流形,3个自由度表达旋转时都可能存在奇异性问题。欧拉角往往只用于人机交互,或者IMU的姿态解算。
5)李代数:可以表示旋转和平移
群是一种集合加上一种运算的代数结构。其满足一定条件。李群是指具有连续(光滑)性质的群。旋转矩阵R和矩阵乘法、欧式变换矩阵T和矩阵乘法都属于李群。分别称为特殊正交群SO(3)、特殊欧式群SE(3)。
李代数由一个集合、一个数域和一个二元运算(李括号)组成。三维向量∅或对应反对称矩阵∅∩、实数域和[∅1,∅2]=(∅1∩ ∅2∩-∅2∩ ∅1∩)∪一起构成一个李代数,称为so(3)。6维向量ε=[ρ,∅]T或其对应反对称矩阵ε∩、实数域和[ε1,ε2]=(ε1∩ ε2∩-ε2∩ ε1∩)∪一起构成一个李代数,称为se(3)。
其中, ρ是三维向量,与平移t线性相关(t=J ρ);∩表示将向量转换成反对称矩阵,∪则是将矩阵变成向量。叉乘可表示为: c=a×b=a∩ b表示如下(口诀:对角为0,右上321,2为正,元素转置后取反)
![0 -∅3 ∅2
∅∩=[∅3 0 -∅1] ε^∩ =[∅^∩ ρ] ,4*4矩阵
-∅2 ∅1 0 0 0](https://img-blog.csdnimg.cn/20210312231515911.png)
exp(∅∩)表示旋转,即SO(n);exp(ε∩)表示平移和旋转,即SE(n)。旋转角度在正负180度内时,李群和李代数元素是一一对应的。李代数的指数映射是李群,反之,李群的对数映射是李代数。SO(3)实际由旋转矩阵R构成,SE(3)与欧式变换矩阵T对应,so(3)和旋转向量θn对应。
注:李代数是向量,李代数的指数映射才能表示旋转矩阵或欧式变换矩阵
SLAM中常见用法:
1)不同表达式之间的转换,如优化时一般用李代数,位姿表示和计算用欧式变换矩阵,优化前后需在两者之间进行转换
2)变换的传递,如:T13=T12T23;q13=q12q23。注意四元数乘法和向量点乘不同
3)转换点或向量的参考坐标系:pw=TWCpc,vw=RWCvc;vw=qwcvcqwc-1(三维向量需表示成纯虚四元数,虚部对应向量3个元素,结果也会是纯虚四元数);注意向量计算时需要将所有向量转换到同一个坐标系
4)已知当前机体坐标系2绕前一机体坐标系1的某已知向量旋转已知角度,如IMU可以得到绕坐标系1每个坐标轴旋转的角速度,角速度乘时间便得到角度,因为转动角度很小,可以分解为欧拉角计算;编码器可以得到绕坐标系1垂直于地面的轴旋转已知角度,可以用任何一种方式方便的得到R12。
2.位姿的不同表达式之间的转换,常见的给定条件是绕某已知轴旋转已知角度,已知轴一般指参考坐标系1中的轴n,角度是指从坐标系1转到坐标系2的角度θ(视线方向与轴方向相反,逆时针为正),得到结果是R12,q12。
1)R-q
a)R->q:R对应的四元数q并不是唯一的,下面列举其中一种。当q0接近于0时,q1、q2、q3的分母很小,可以考虑其他表示形式
q0=sqrt[tr(R.)+1]/2, q1=(c2-b3)/(4q0), q2=(a3-c1)/(4q0), q3=(b1-a2)/(4q0)
sqrt—根号;tr-矩阵的迹,对角线上元素相加
b)q->R

2)R-θn
a)R->θn
θ=arccos([tr(R.)-1]/2)
但是,这种方法在数值上并不太准确,而且在θ=pi时找不到轴线,故用arctan较好,见《多视图几何》P584
n是R特征值1对应的特征向量Rn=1n->(R-I)n=0,因n不为0向量,等价于齐次方程有非0解,故r(R-I)<.3,通过高斯消元法可以求得n
b)θn->R
R=cosθI+(1-cosθ)nnT+sinθn^∩
特例:绕坐标系1坐标轴旋转θ得到坐标系2,可得旋转矩阵R12如下(口诀:绕哪个坐标系哪个坐标系为参考坐标系,绕哪个轴哪个轴不变,正对角为cos,斜对角为正负sin,绕y上为正):

3)R-欧拉角
a)R->欧拉角:待补充
b)欧拉角->R:通过2)-b)特例可以得到每次旋转后的相对位姿,则有:R=R12R23R34
4)θn-李代数so(3):为了6)将该条提前
a)θn->李代数so(3)
∅=θn
b)李代数so(3)->θn
θ=|∅|,|∅|表示∅的模长
n=∅/θ
5)R/T-李代数so(3)/ se(3)
李代数so(3)/ se(3)中的3维向量∅可以按4)-b)转换成轴角θn
a)R->李代数so(3)
先用2)-a)将R转换成轴角θn,得∅=θn
b)李代数so(3)->R
R=exp(∅∩),根据exp(A)、sin(x)、cos(x)泰勒展开公式可得2)-b)一样的结果:R=cosθI+(1-cosθ)nnT+sinθn∩
c)T->李代数se(3)
先求3维旋转部分∅,用a)将T得R转化成∅即可
再由平移t得到ρ:ρ=J-1) t
J-1=0.5θ cot(0.5θ)I+[1-0.5θ cot(0.5θ) ]nnT-0.5θn∩
d)李代数se(3)->T
T=exp(ε∩)
R可以使用b)公式由ε中∅得到
t=J ρ
J=(sinθ/θ)I+(1-sinθ/θ)nnT+[(1-cosθ)/θ]n∩
6)q-θn
a)q->θn
θ=2arccosq0
[nx,ny,nz]T=[q1,q2,q3]T/sin(θ/2)
b)θn->q
q=[cos(θ/2), sin(θ/2)nx, sin(θ/2)ny, sin(θ/2)nz]T
7)q-欧拉角
a)q->欧拉角:待补充
b)欧拉角->θn:通过5)-b)可以得到每次旋转后的相对位姿,则有:q=q12q23q34
8)q-李代数so(3)
a)q->李代数so(3)
先按4)-a)将q变换成θn,则∅=θn
b)李代数so(3)->q
先按4)-a)将∅变换成θn,再按6)-b)求q
9)θn-欧拉角
a)θn ->欧拉角:待补充
b)欧拉角->θn:通过3)-b) 或6)-b)可以得到每次旋转R或q,再将R或q转成θn
10)欧拉角-李代数so(3)
a)欧拉角->李代数so(3)
先按9)-b)将欧拉角变换成θn,则∅=θn
b)李代数so(3)->欧拉角:待补充














 1616
1616











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









