






paper:https://arxiv.org/pdf/2108.03144.pdf
github source code:GitHub - iago-suarez/ELSED: ELSED: Enhanced Line SEgment Drawing
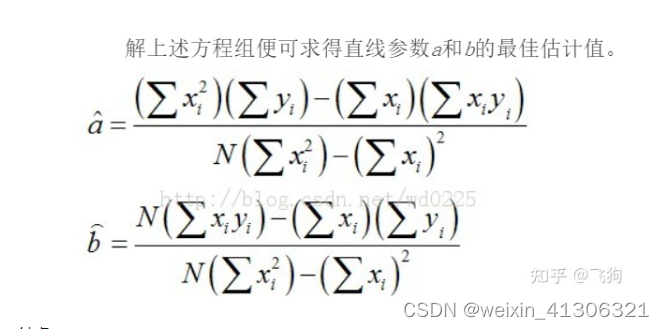
一、最小二乘直线拟合
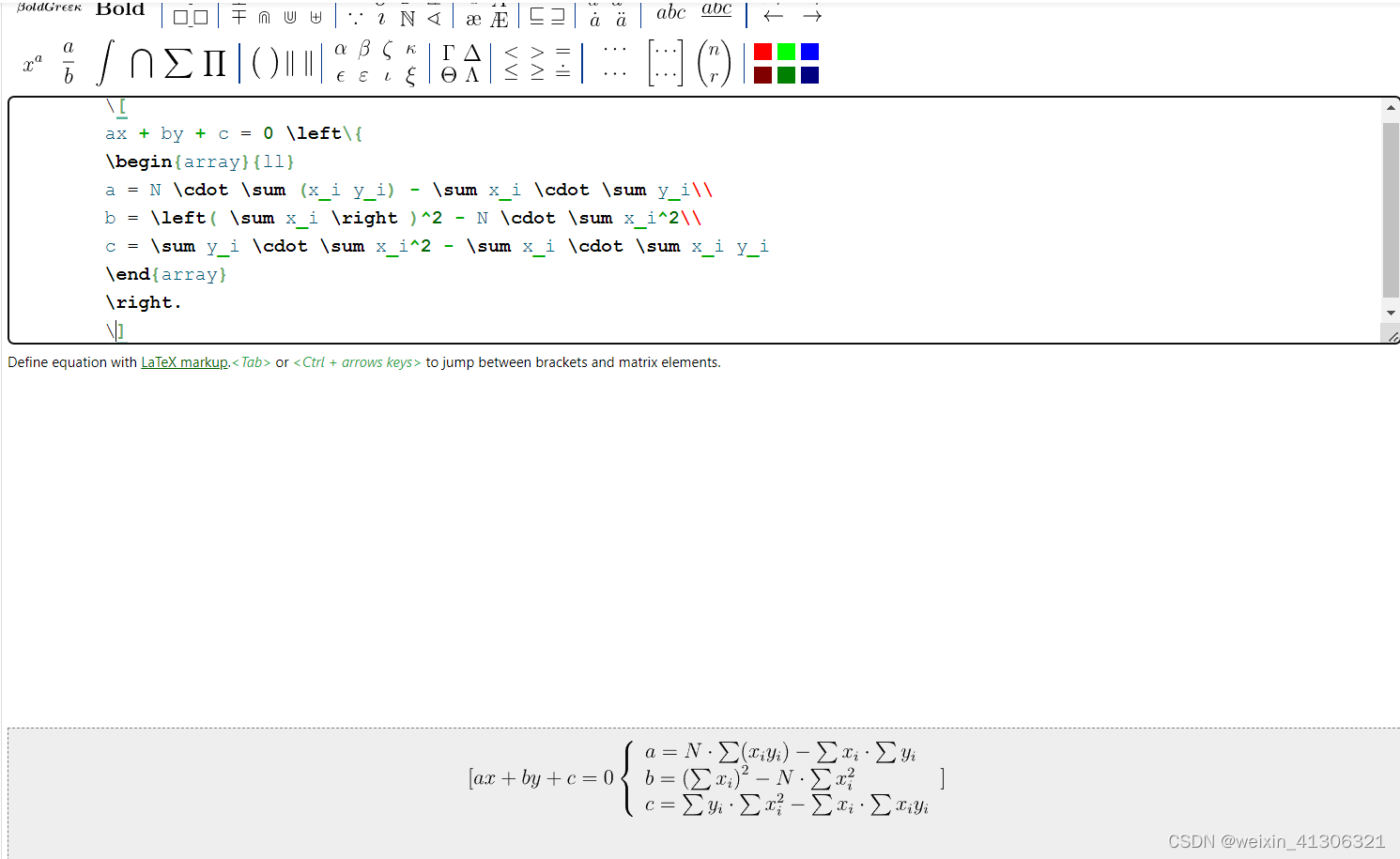
公式:使用Online Equation Editor - standalone查看calculateLineEq方法注释上的公式
补充上图公式的理解:
直线拟合——最小二乘法、hough变换 - 知乎 https://zhuanlan.zhihu.com/p/363278784
https://zhuanlan.zhihu.com/p/363278784
一个是 a+bx, 一个是b+ax, 点斜式和一般式的变换

inline void FullSegmentInfo::leastSquareLineFit(const std::vector<Pixel> &pts, int startIdx) {
int i, indpCoord, depCoord;
sum_x_i = 0, sum_y_i = 0, sum_x_i_y_i = 0, sum_x_i_2 = 0;
N = pts.size() - startIdx;
if (isHorizontal) {
for (i = startIdx; i < pts.size(); i++) {
indpCoord = pts[i].x;
depCoord = pts[i].y;
sum_x_i += indpCoord;
sum_y_i += depCoord;
sum_x_i_2 += indpCoord * indpCoord;
sum_x_i_y_i += indpCoord * depCoord;
}
} else {
for (i = startIdx; i < pts.size(); i++) {
indpCoord = pts[i].y;
depCoord = pts[i].x;
sum_x_i += indpCoord;
sum_y_i += depCoord;
sum_x_i_2 += indpCoord * indpCoord;
sum_x_i_y_i += indpCoord * depCoord;
}
}
calculateLineEq();
}
inline void FullSegmentInfo::calculateLineEq() {
// Line equation is calculated as:
// \[
// ax + by + c = 0 \left\{
// \begin{array}{ll}
// a = N \cdot \sum (x_i y_i) - \sum x_i \cdot \sum y_i\\
// b = \left( \sum x_i \right )^2 - N \cdot \sum x_i^2\\
// c = \sum y_i \cdot \sum x_i^2 - \sum x_i \cdot \sum x_i y_i
// \end{array}
// \right.
// \]
// Compute the line equation coefficients
equation[2] = sum_y_i * sum_x_i_2 - sum_x_i * sum_x_i_y_i;
if (isHorizontal) {
equation[0] = N * sum_x_i_y_i - sum_x_i * sum_y_i;
equation[1] = sum_x_i * sum_x_i - N * sum_x_i_2;
} else {
equation[1] = N * sum_x_i_y_i - sum_x_i * sum_y_i;
equation[0] = sum_x_i * sum_x_i - N * sum_x_i_2;
}
// Normalize the line equation
equation *= (1 / std::sqrt(equation[0] * equation[0] + equation[1] * equation[1]));
//为什么要这么做???
// Fix the line equation
if (dx * -equation[1] + dy * equation[0] < 0) {
equation[0] = -equation[0];
equation[1] = -equation[1];
equation[2] = -equation[2];
}
}
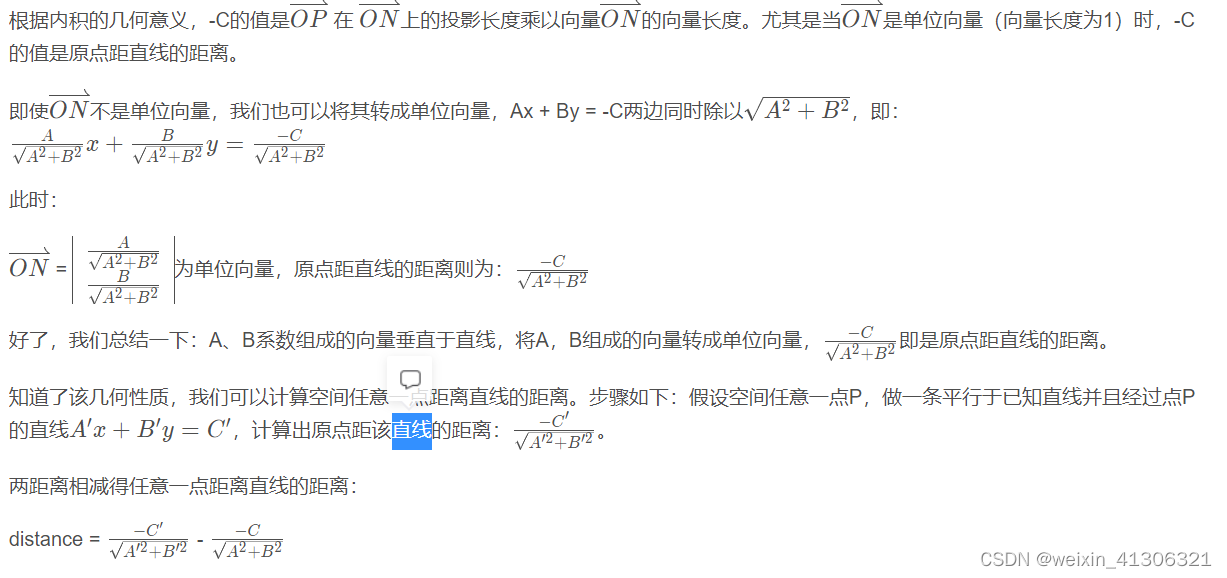
二、计算直线拟合的均方误差,点到直线的距离

inline double getFitError() const {
double dist, fitError = 0;
for (int i = firstPxIndex; i <= lastPxIndex; i++) {
dist = equation[0] * (*pixels)[i].x + equation[1] * (*pixels)[i].y + equation[2];
fitError += dist * dist;
}
return fitError / N;
}
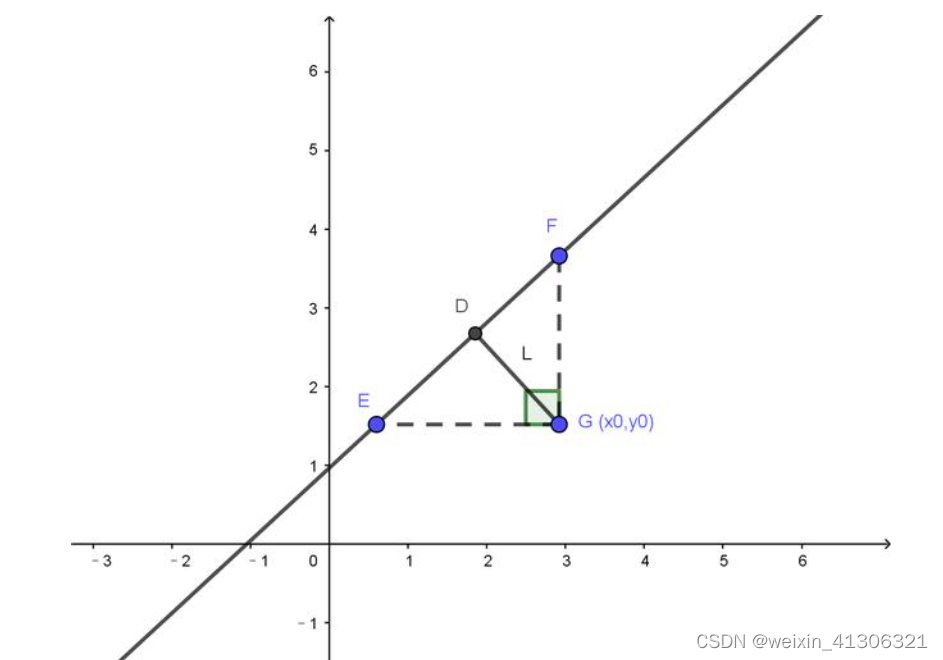
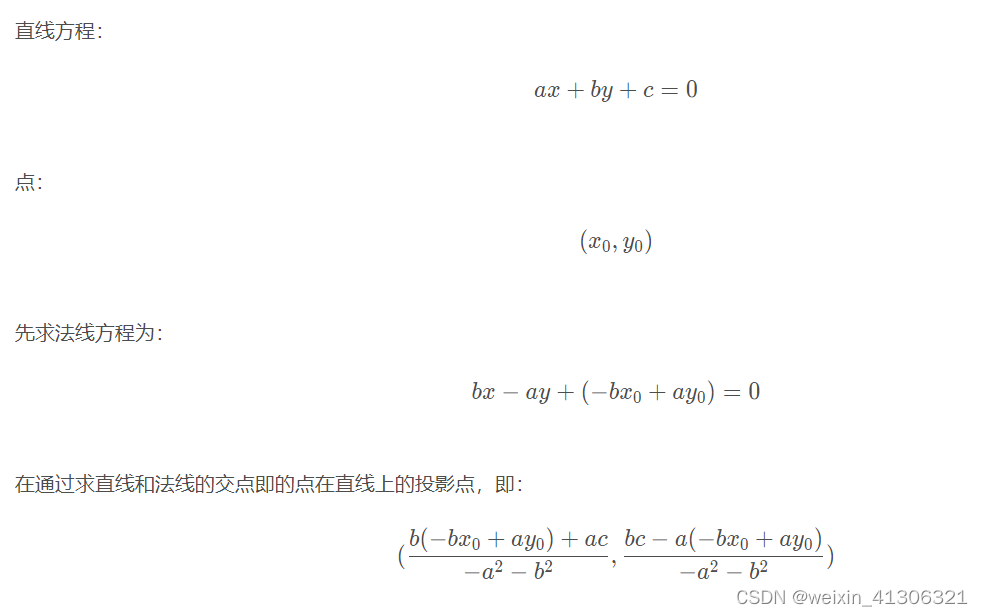
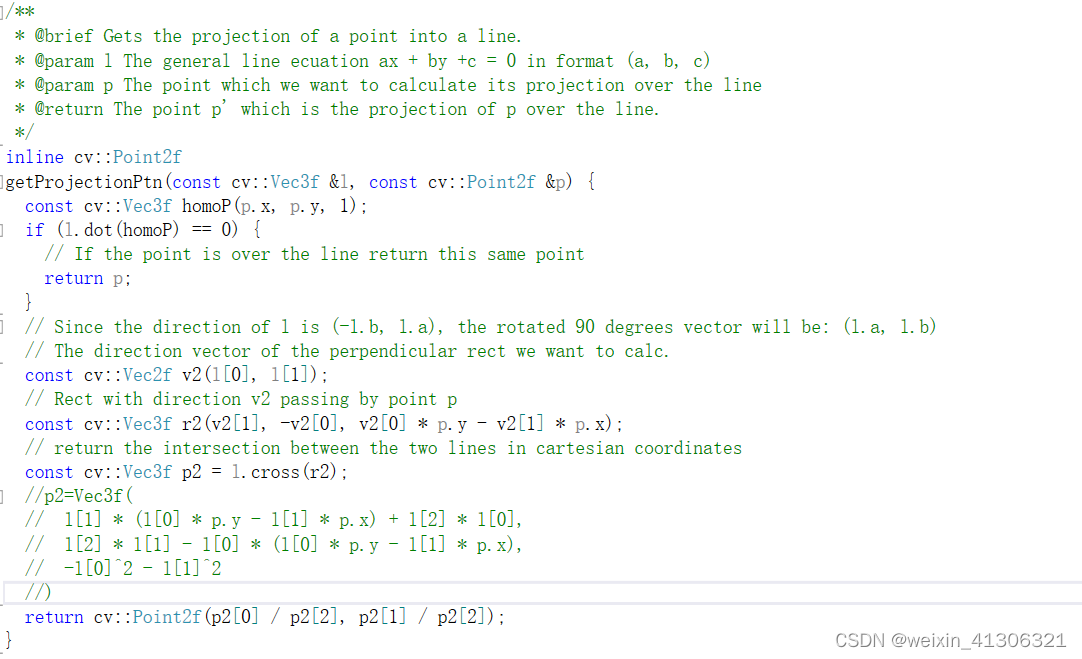
三、获取点到直线的投影
公式:点在直线上的投影点_RobotLife的博客-CSDN博客_点在直线上的投影

















 410
410

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









