






1.github原项目地址:点这。
3.环境依赖安装:suitesparse
sudo apt-get install libsuitesparse-dev4.编译安装创建msckf-vio/src文件夹,在src文件夹下打开终端。
git clone https://github.com/KumarRobotics/msckf_vio.git
cd ..
catkin_make --pkg msckf_vio --cmake-args -DCMAKE_BUILD_TYPE=Release出现错误
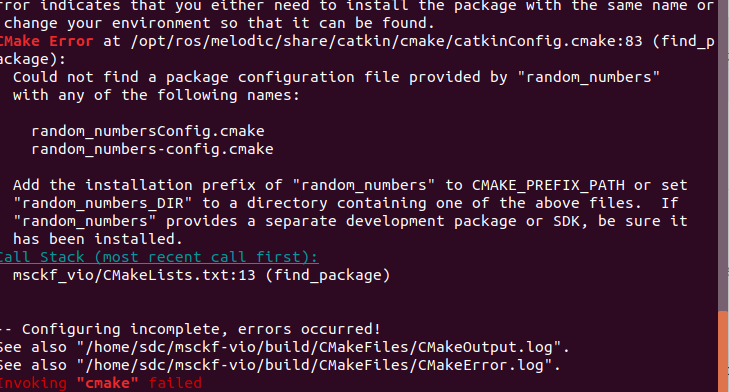
解决办法
sudo apt-get install ros-melodic-random-numbers
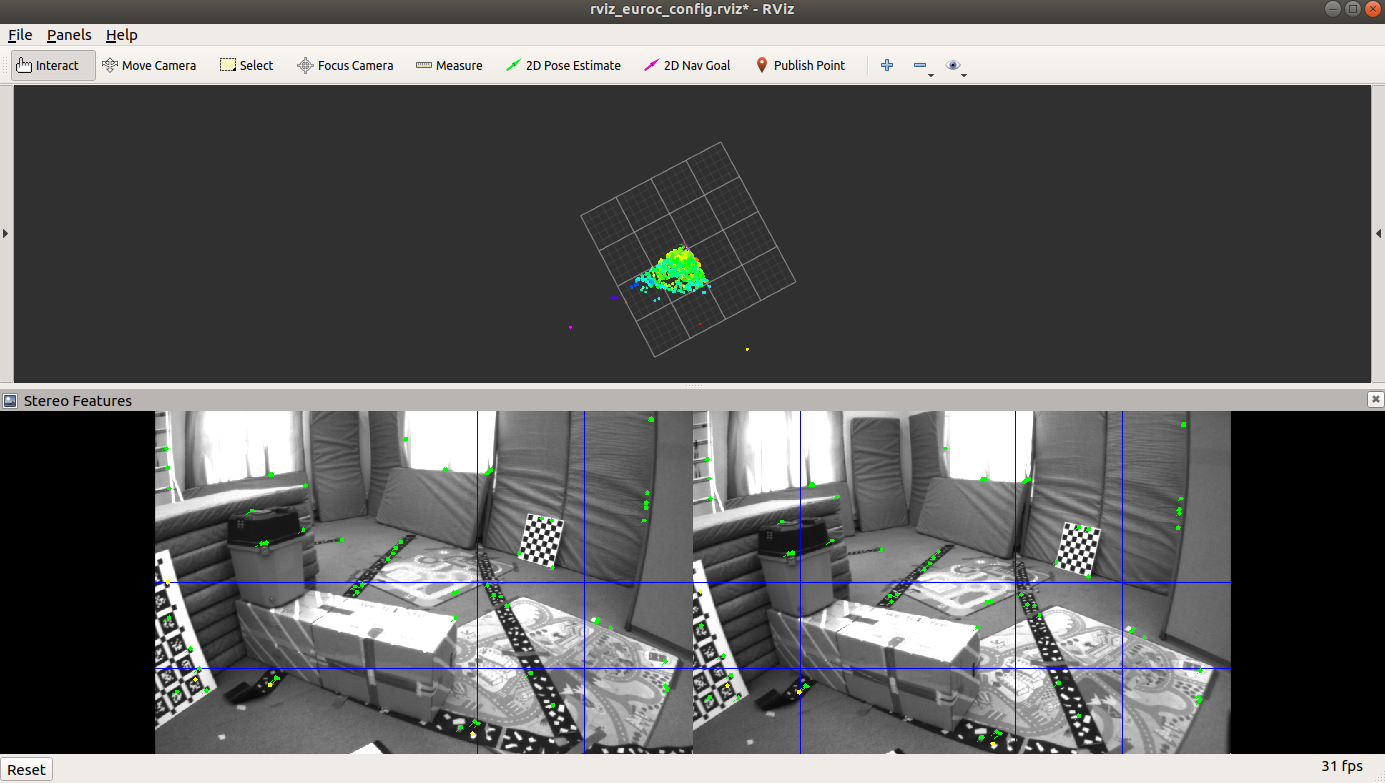
5.EuRoc数据集测试
source ./devel/setup.bash
roslaunch msckf_vio msckf_vio_euroc.launch
rosbag play V1_01_easy.bag
rosrun rviz rviz -d /home/sdc/msckf-vio/src/msckf_vio/rviz/rviz_euroc_config.rviz
V1_01_easy.bag下载地址:点这















 795
795











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









