







1.ROS的下载:此处下载ROS1 的ubuntu18 版本:点这
2.ceres的下载:此处下载ceres1.14的版本:点这
3.如果下载的ROS版本为desktop-full不需要另外下载PCL
4.安装工程目录:
新建一个为catkin_ws的文件,catkin_ws下新建一个src文件。在src目录下打开终端输入以下指令。
cd ~/catkin_ws/src
git clone https://github.com/HKUST-Aerial-Robotics/A-LOAM.git
cd ../
catkin_make
source ~/catkin_ws/devel/setup.bash5.下载bag包到自己的指定的路径:点这 密码:y2zr
roslaunch aloam_velodyne aloam_velodyne_VLP_16.launch
rosbag play nsh_indoor_outdoor.bag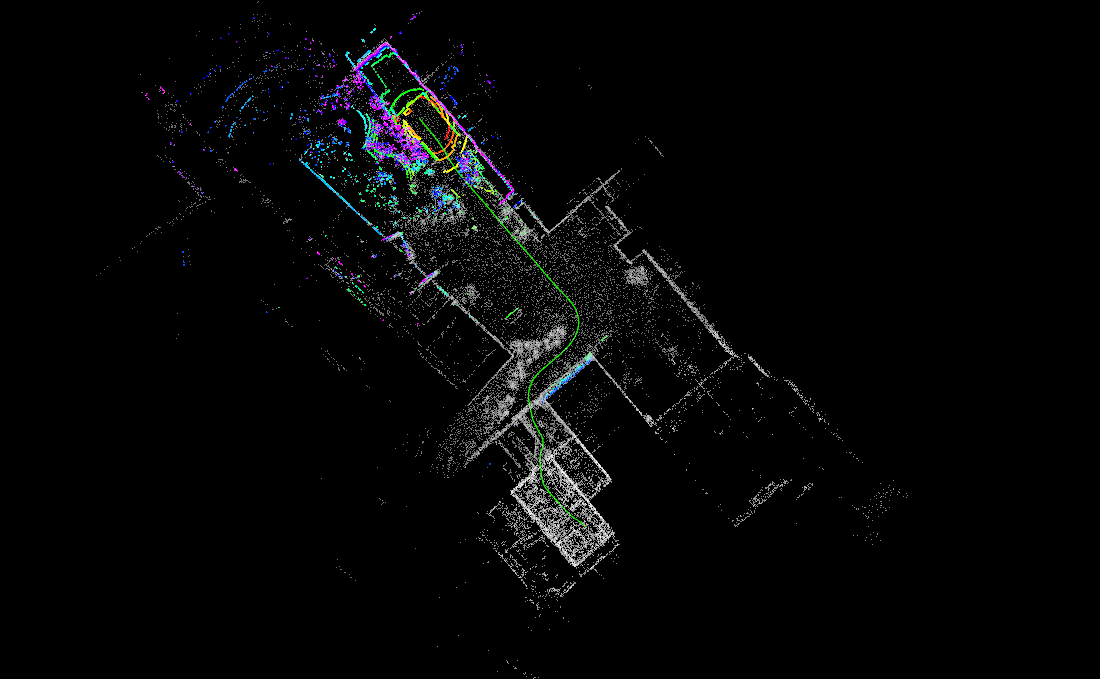















 6487
6487











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









