








最远点采样能够确保采样得到的点是距离已经选择出来来最远的点,确保采样均匀。
直接上代码,代码来自pointnet++源码:
def farthest_point_sample(xyz, npoint):
"""
Input:
xyz: pointcloud data, [B, N, 3]
npoint: number of samples
Return:
centroids: sampled pointcloud index, [B, npoint]
"""
device = xyz.device
B, N, C = xyz.shape
# 初始化一个centroids矩阵,用于存储npoint个采样点的索引位置,大小为B×npoint
# 其中B为BatchSize的个数
centroids = torch.zeros(B, npoint, dtype=torch.long).to(device)
# distance矩阵(B×N)记录某个batch中所有点到某一个点的距离,初始化的值很大,后面会迭代更新
distance = torch.ones(B, N).to(device) * 1e10
# farthest表示当前最远的点,也是随机初始化,范围为0~N,初始化B个;每个batch都随机有一个初始最远点
farthest = torch.randint(0, N, (B,), dtype=torch.long).to(device)
# batch_indices初始化为0~(B-1)的数组
batch_indices = torch.arange(B, dtype=torch.long).to(device)
# 直到采样点达到npoint,否则进行如下迭代:
for i in range(npoint):
# 设当前的采样点centroids为当前的最远点farthest
centroids[:, i] = farthest
# 取出该中心点centroid的坐标
centroid = xyz[batch_indices, farthest, :].view(B, 1, 3)
# 求出所有点到该centroid点的欧式距离,存在dist矩阵中
dist = torch.sum((xyz - centroid) ** 2, -1)
# 建立一个mask,如果dist中的元素小于distance矩阵中保存的距离值,则更新distance中的对应值
# 随着迭代的继续,distance矩阵中的值会慢慢变小,
# 其相当于记录着某个Batch中每个点距离所有已出现的采样点的最小距离
mask = dist < distance#确保拿到的是距离所有已选中心点最大的距离。比如已经是中心的点,其dist始终保持为 #0,二在它附近的点,也始终保持与这个中心点的距离
distance[mask] = dist[mask]
# 从distance矩阵取出最远的点为farthest,继续下一轮迭代
farthest = torch.max(distance, -1)[1]
return centroids
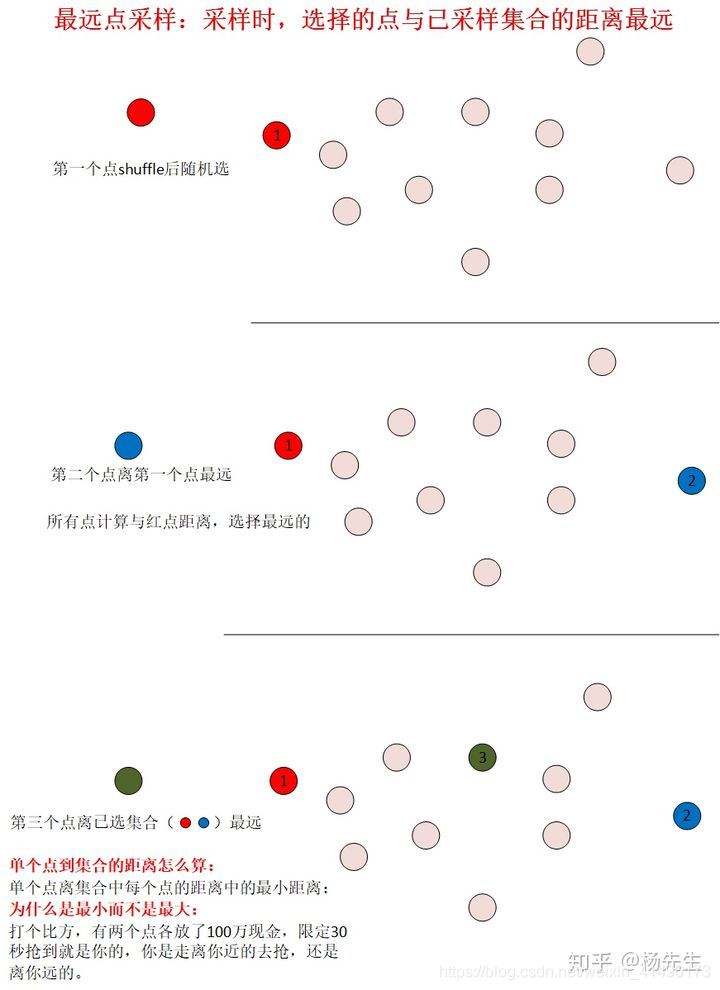
理解点3如何选择是理解FPS的关键,即点3是应该是选出到点1和点2都很远的点,如果他离点2远,但是离点1很近,这个也是不合适的,所以在上述代码中:
mask = dist < distance#更新采用距离。采样距离是指与已采样出来的点最小的距离。每次采样的时候挑一个采样距离最大的点。
distance[mask] = dist[mask]
图片转载:https://zhuanlan.zhihu.com/p/273539387

















 642
642

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









