






上篇博客写到了安装好了moveit
这里开始moveit和gazebo联合示例
主演参考博客:点击此处和点击此处
记录一下遇到的问题

按照我上一篇博客,是将moveit按照在了moveit_ws文件夹里面
这样输出这句话:roslaunch moveit_setup_assistant setup_assistant.launch
出来点击load file之后会显示
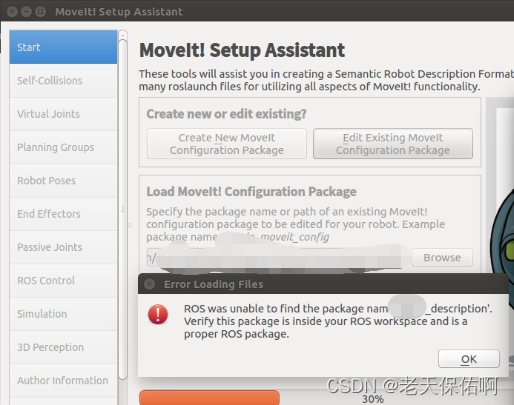
并且右边不会显示模型,是个全灰的界面
此时,只需要改一下我们上一篇博客设置的工作路径就可以
终端输入:
gedit ~/.bashrc
进入文件,最后添加一句
source ~/xxxxxx_ws/devel/setup.bash
其中xxxxxx是你工作空间的名字(我的urdf文件就在catkin_ws)
接着,打开终端,运行
roscore
再开一个新的终端,运行
rosrun moveit_setup_assistant moveit_setup_assistant
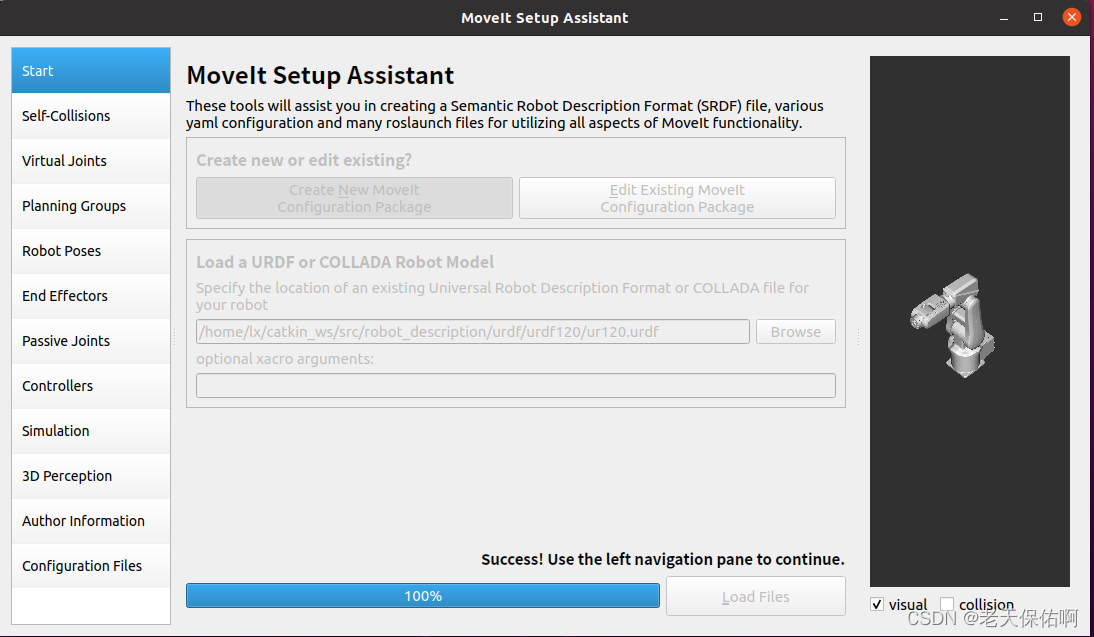
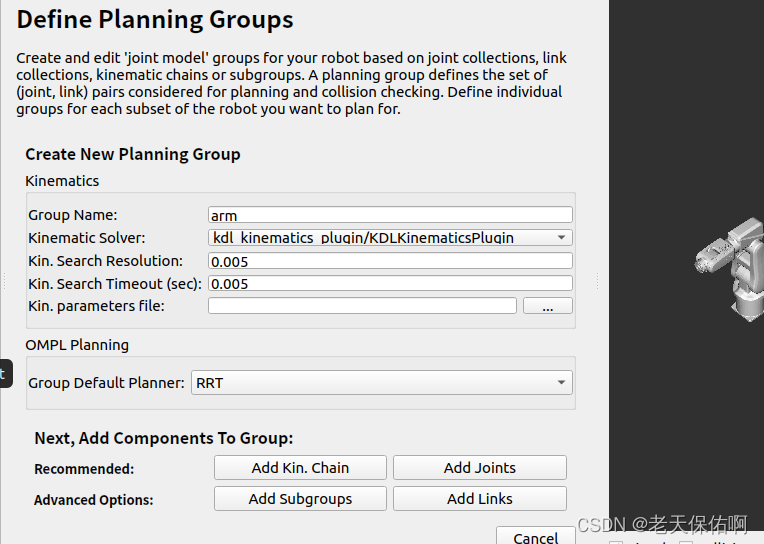
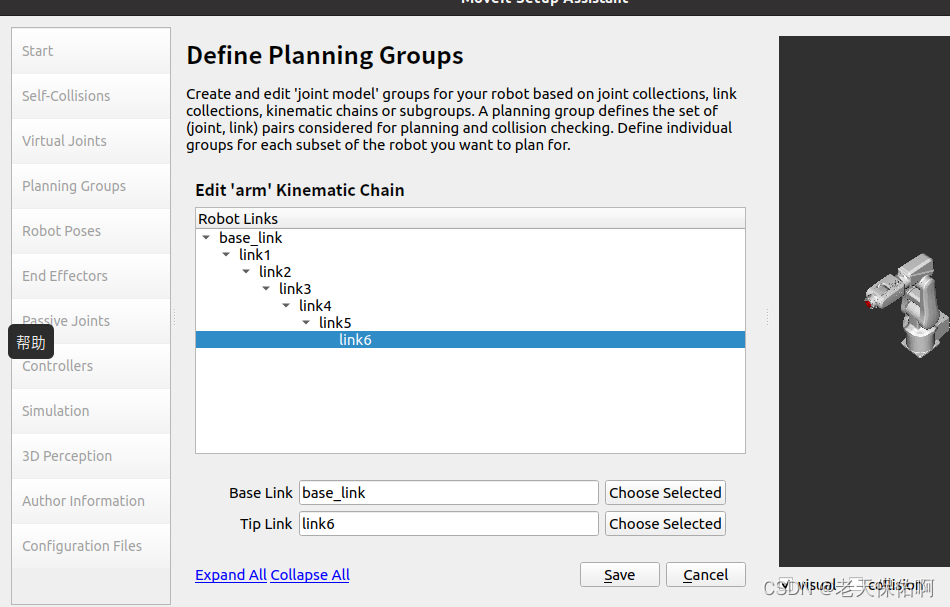
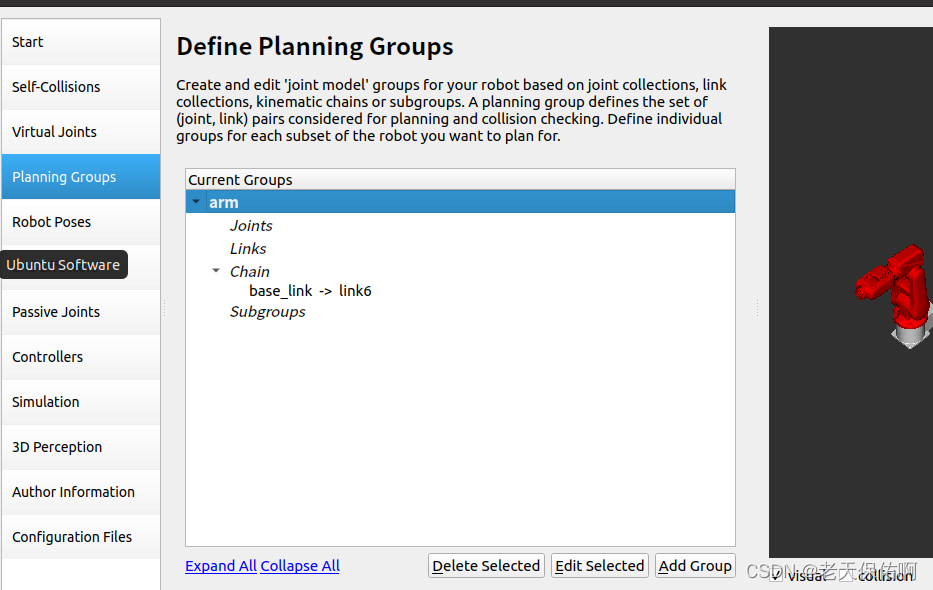
后续的菜单栏左边设置基本一致(注意planning groups)
moveit+gazebo
模型疯狂抖动















 1873
1873











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









