






 该文指导如何在ROSNoetic环境下安装相关功能包,如USB-CAM、cameracalibration和imageprocessing工具。接着,它展示了如何在URDF文件中添加相机传感器,包括设置固定关节和调整参数。之后,通过运行gazebo.launch启动模拟环境,并查看发布的话题列表。最后,利用rqt_image_view显示相机捕获的图像,从而验证配置成功。
该文指导如何在ROSNoetic环境下安装相关功能包,如USB-CAM、cameracalibration和imageprocessing工具。接着,它展示了如何在URDF文件中添加相机传感器,包括设置固定关节和调整参数。之后,通过运行gazebo.launch启动模拟环境,并查看发布的话题列表。最后,利用rqt_image_view显示相机捕获的图像,从而验证配置成功。
1、安装功能包
sudo apt install ros-noetic-usb-cam ros-noetic-camera-calibration ros-noetic-image-view ros-noetic-image-proc
2、urdf文件,参考官网添加相应的相机传感器这里
<link name="camera_link"> <!---这里的名称要注意>
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<box size="0.03 0.04 0.04" />
</geometry>
<material name="red">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<joint name="camera_joint" type="fixed">
<origin xyz="0.0 0.05 0.0" rpy="0 0 1.57"/> <!---这里根据摄像头的位置进行改变,1.57就是90°>
<parent link="wrist_3_link"/>
<child link="camera_link"/>
</joint>
<!-- camera -->
<gazebo reference="${link_name}"> <!---这里的名称要和link一致>
<sensor name="${link_name}_camera" type="depth">
<update_rate>20</update_rate>
<camera>
<horizontal_fov>1.047198</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.05</near>
<far>3</far>
</clip>
</camera>
<plugin name="${link_name}_controller" filename="libgazebo_ros_openni_kinect.so">
<baseline>0.2</baseline>
<alwaysOn>true</alwaysOn>
<updateRate>1.0</updateRate>
<cameraName>${camera_name}_ir</cameraName> <!---这里名称可以随便命名,但是下面的五个${camera_name}要和这里的一致>
<imageTopicName>/${camera_name}/color/image_raw</imageTopicName>
<cameraInfoTopicName>/${camera_name}/color/camera_info</cameraInfoTopicName>
<depthImageTopicName>/${camera_name}/depth/image_raw</depthImageTopicName>
<depthImageInfoTopicName>/${camera_name}/depth/camera_info</depthImageInfoTopicName>
<pointCloudTopicName>/${camera_name}/depth/points</pointCloudTopicName>
<frameName>${frame_name}</frameName> <!---这里的名称要和link一致>
<pointCloudCutoff>0.5</pointCloudCutoff>
<pointCloudCutoffMax>3.0</pointCloudCutoffMax>
<distortionK1>0.00000001</distortionK1>
<distortionK2>0.00000001</distortionK2>
<distortionK3>0.00000001</distortionK3>
<distortionT1>0.00000001</distortionT1>
<distortionT2>0.00000001</distortionT2>
<CxPrime>0</CxPrime>
<Cx>0</Cx>
<Cy>0</Cy>
<focalLength>0</focalLength>
<hackBaseline>0</hackBaseline>
</plugin>
</sensor>
</gazebo>
ps,我这部分代码如下
<link name="camera_link">
<visual>
<origin xyz=" 0 0 0 " rpy="0 0 0" />
<geometry>
<sphere radius="0.005" />
</geometry>
<material name="red">
<color rgba="0 0 0 0.95"/>
</material>
</visual>
</link>
<joint name="camera_joint" type="fixed">
<origin xyz="0.0 0.05 0.0" rpy="0 0 1.57"/>
<parent link="wrist_3_link"/>
<child link="camera_link"/>
</joint>
<gazebo reference="camera_link">
<sensor name="camera_depth" type="depth">
<update_rate>20</update_rate>
<camera>
<horizontal_fov>1.047198</horizontal_fov>
<image>
<width>640</width>
<height>480</height>
<format>R8G8B8</format>
</image>
<clip>
<near>0.05</near>
<far>3</far>
</clip>
</camera>
<plugin name="camera_controller" filename="libgazebo_ros_openni_kinect.so">
<baseline>0.2</baseline>
<alwaysOn>true</alwaysOn>
<updateRate>1.0</updateRate>
<cameraName>camera</cameraName>
<imageTopicName>/camera/color/image_raw</imageTopicName>
<cameraInfoTopicName>/camera/color/camera_info</cameraInfoTopicName>
<depthImageTopicName>/camera/depth/image_raw</depthImageTopicName>
<depthImageInfoTopicName>/camera/depth/camera_info</depthImageInfoTopicName>
<pointCloudTopicName>/camera/depth/points</pointCloudTopicName>
<frameName>camera_link</frameName>
<pointCloudCutoff>0.5</pointCloudCutoff>
<pointCloudCutoffMax>3.0</pointCloudCutoffMax>
<distortionK1>0.00000001</distortionK1>
<distortionK2>0.00000001</distortionK2>
<distortionK3>0.00000001</distortionK3>
<distortionT1>0.00000001</distortionT1>
<distortionT2>0.00000001</distortionT2>
<CxPrime>0</CxPrime>
<Cx>0</Cx>
<Cy>0</Cy>
<focalLength>0</focalLength>
<hackBaseline>0</hackBaseline>
</plugin>
</sensor>
</gazebo>
3、运行
roslaunch Gluon_moveit_config gazebo.launch
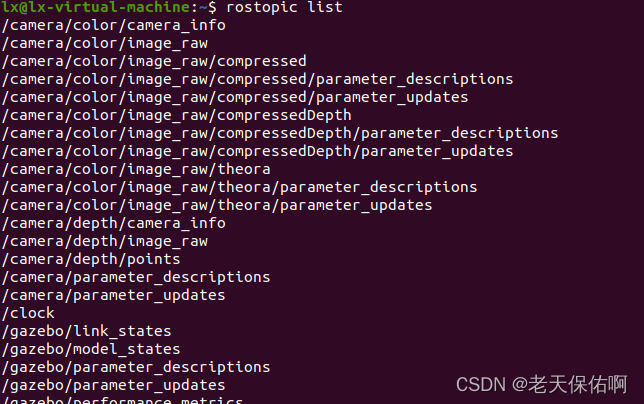
4、运行
rostopic list
可以看到相关的话题发布
5、运行
rqt_image_view
可以看到相机的捕获画面
6、最终效果
gazebo的urdf添加相机


















 1785
1785

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









