







 本文介绍了在ROS环境下,如何创建QT界面功能包来读取和驱动TX90机器人以及OptoForce力传感器。通过QT多线程实现数据读取和界面更新,同时详细讲解了opto力传感器功能包的数据读取步骤,并给出了相关代码示例和驱动包参考链接。
本文介绍了在ROS环境下,如何创建QT界面功能包来读取和驱动TX90机器人以及OptoForce力传感器。通过QT多线程实现数据读取和界面更新,同时详细讲解了opto力传感器功能包的数据读取步骤,并给出了相关代码示例和驱动包参考链接。
1.编写qt功能包
catkin_create_qt_pkg zlc_robot
生成的文件如下
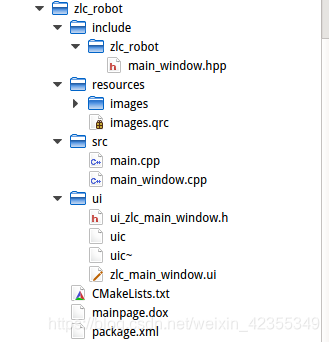
对自动生成的功能包做修改,重命名ui文件,添加一个文本uic,里面写入如下命令,每次更改后运行该命令将自动生成头文件
uic zlc_main_window.ui -o ui_zlc_main_window.h
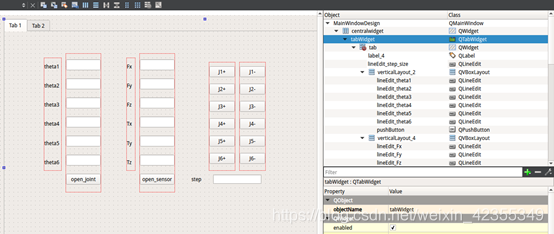
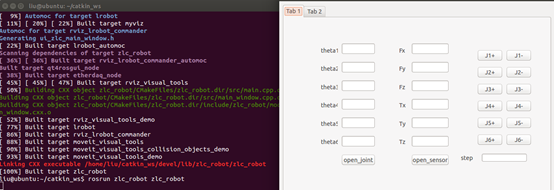
改后的界面如下:
运行效果如图:
上述资源见链接:https://download.csdn.net/download/weixin_42355349/11205369
2.qt多线程实现(不是很规范)

zlc_thread.h文件如下:
#ifndef ZLC_THREAD_H
#define ZLC_THREAD_H
#include<QThread>
#include <vector>
#include "std_msgs/String.h"
#include "sensor_msgs/JointState.h"
class zlc_thread : public QThread
{
public:
zlc_thread();
~zlc_thread();
void closeThread();
void emittoui();
protected:
virtual void run();
public:
bool isjointstate_open;
bool issensorstate_open;
// bool isjoint_control;
bool istimer;
int threadmode;
float step_size;
float px;
float py;
float pz;
float ow;
float ox;
float oy;
float oz;
float j1;
float j2;
float j3;
float j4;
float j5;
float j6;
double pos[6];
double vel[6];
double acc[6];
double sensor_F[3];
double sensor_T[3];
private:
volatile bool isStop; //isStop是易失性变量,需要用volatile进行申明
};
#endif // ZLC_THREAD_H
zlc_thread.cpp文件如下:
#include "zlc_thread.h"
#include <QDebug>
#include <QMutex>
#include <iostream>
#include <Eigen/Eigen>
#include <stdlib.h>
#include <Eigen/Geometry> //eigen
#include <Eigen/Core>
#include <vector>
#include <math.h>
#include <ros/ros.h>
#include <ros/console.h>
#include <rviz/panel.h> //plugin基类的头文件
#include <Eigen/Eigen>
#include <vector>
#include <memory.h>
#include <moveit/move_group_interface/move_group.h>
#include <moveit/robot_state/robot_state.h>
#include <iostream>
#include <fstream>
//ADD
#include <moveit/planning_scene_interface/planning_scene_interface.h>
#include <moveit_msgs/DisplayRobotState.h>
#include <moveit_msgs/DisplayTrajectory.h>
#include <moveit_msgs/AttachedCollisionObject.h>
#include <moveit_msgs/CollisionObject.h>
#include <moveit_msgs/AttachedCollisionObject.h>
#include <moveit/planning_request_adapter/planning_request_adapter.h>
#include <moveit/trajectory_processing/iterative_time_parameterization.h>
#include <moveit/trajectory_processing/trajectory_tools.h>
#include <moveit_visual_tools/moveit_visual_tools.h>
#include <geometry_msgs/PointStamped.h>
#include "../../etherdaq_ros-master/include/etherdaq_driver/etherdaq_driver.h"
#include <stdlib.h>
#include <stdio.h>
#include "std_msgs/Bool.h"
#include "ros/ros.h"
#include "geometry_msgs/WrenchStamped.h"
#define GOHOME 0
#define J1ADD 1
#define J1DEC 2
#define J2ADD 3
#define J2DEC 4
#define J3ADD 5
#define J3DEC 6
#define J4ADD 7
#define J4DEC 8
#define J5ADD 9
#define J5DEC 10
#define J6ADD 11
#define J6DEC 12
#define PI 3.14159265358979323846
using namespace std;
using namespace optoforce_etherdaq_driver;
zlc_thread* pthread;
zlc_thread::zlc_thread()
{
isStop = false;
istimer = false;
isjointstate_open = false;
issensorstate_open = false;
// isjoint_control = false;
pthread = this;
}
zlc_thread::~zlc_thread()
{
}
void zlc_thread::closeThread()
{
isStop = true;
}
void zlc_thread::emittoui()
{
}
extern zlc_thread* pthread;
void jointstatesCallback(const sensor_msgs::JointStateConstPtr& msg)
{
pthread->pos[0] = msg->position[0];
pthread->pos[1] = msg->position[1];
pthread->pos[2] = msg->position[2];
pthread->pos[3] = msg->position[3];
pthread->pos[4] = msg->position[4];
pthread->pos[5] = msg->position[5];
}
void sensordatasCallback(const geometry_msgs::WrenchStamped& msg)
{
pthread->sensor_F[0] = msg.wrench.force.x;
pthread->sensor_F[1] = msg.wrench.force.y;
pthread->sensor_F[2] = msg.wrench.force.z;
pthread->sensor_T[0] = msg.wrench.torque.x;
pthread->sensor_T[1] = msg.wrench.torque.y;
pthread->sensor_T[2] = msg.wrench.torque.z;
}
void zlc_thread::run()
{
ros::NodeHandle node_handle;
ros::AsyncSpinner spinner(1);
spinner.start();
static const std::string PLANNING_GROUP = "arm";
moveit::planning_interface::MoveGroup group(PLANNING_GROUP);
// 原始指针经常被用来指代计划组以提高性能。
const robot_state::JointModelGroup *joint_model_group =
group.getCurrentState()->getJointModelGroup(PLANNING_GROUP);
std::vector <double> joint;
if(isjointstate_open == true)
{
ros::Subscriber sub = node_handle.subscribe("/joint_states", 1000, jointstatesCallback);
while(1)
{
sleep(1); //1ms
}
}
else
{
switch (threadmode)
{
case GOHOME:
{
joint.clear();
joint.push_back(0*PI/180);
joint.push_back(0*PI/180);
joint.push_back(90*PI/180);
joint.push_back(0*PI/180);
joint.push_back(45*PI/180);
joint.push_back(0*PI/180);
group.setJointValueTarget(joint);
//group.setMaxVelocityScalingFactor(velscale);
// 进行运动规划,计算机器人移动到目标的运动轨迹,此时只是计算出轨迹,并不会控制机械臂运动
moveit::planning_interface::MoveGroup::Plan my_plan;
moveit::planning_interface::MoveItErrorCode success = group.plan(my_plan);
//让机械臂按照规划的轨迹开始运动。
if(success)
group.execute(my_plan);
}
break;
case J1ADD:
{
joint.clear();
joint.push_back(group.getCurrentJointValues().at(0)+(step_size*PI/180));
joint.push_back(group.getCurrentJointValues().at(1));
joint.push_back(group.getCurrentJointValues().at(2));
joint.push_back(group.getCurrentJointValues().at(3));
joint.push_back(group.getCurrentJointValues().at(4));
joint.push_back(group.getCurrentJoint 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









