







Scaffold-GS:视图自适应渲染的重建
一种隐式和显式表达的结合方法,三个主要贡献点:1. 三维高斯表示场景,锚点和voxel结合去掉冗余高斯,更注重场景的结构表示;2. 用MLP来训练高斯参数;3. anchor的增删策略替换了原版的高斯增删策略;
论文地址:[2312.00109] Scaffold-GS: Structured 3D Gaussians for View-Adaptive Rendering (arxiv.org)
项目地址:Scaffold-GS: Structured 3D Gaussians for View-Adaptive Rendering (city-super.github.io)
Scaffold-GS
论文解读(来自ChatGpt)
研究背景与动机
在计算机视觉领域,尤其是3D场景渲染方面,实现高质量的视觉效果与实时渲染性能的平衡一直是一个挑战。尽管最近的方法如3D Gaussian Splatting(3D-GS)在渲染质量和速度上取得了显著进展,但它们在处理大规模场景和复杂光照条件下的冗余性和鲁棒性不足。
研究贡献
本研究的核心贡献在于提出了Scaffold-GS,这是一种基于锚点的分层3D高斯表示方法,能够动态适应不同的观察角度和距离,显著提升了渲染的鲁棒性和效率。具体贡献包括:
- 结构化3D场景表示:通过从结构从运动(SfM)初始化的稀疏锚点网格,引导局部3D高斯的分布,形成层次化和区域感知的场景表示。
- 从论文的图6中可以看到点云的结构特征比较明显,聚类算法可以将物体点云聚集为同一类;
- 视图自适应属性预测:在视锥体内,基于锚点特征和视图依赖信息实时预测神经高斯的属性,如不透明度和颜色,以适应多样化的视图方向和距离。
- 锚点生长与修剪策略:开发了一种基于神经高斯重要性的锚点生长和修剪机制,以提高场景覆盖的可靠性。
- 这一点其实是适配他们自己提出的anchor特性,感觉可以在destiny和prune的条件部分做些优化和修改(可惜暂时没有好的想法)
方法
Scaffold-GS采用了一种新颖的方法,包括:
- 锚点初始化:利用SfM点云构建稀疏锚点网格,为场景提供一个粗略的几何框架。原版是用SfM的点作为高斯初始化点,这里将点云体素化,每一个voxel的中心作为anchor,并规定了voxel尺寸,为每个anchor构造了相应的feature bank;
- 神经高斯衍生:从每个锚点生成一组神经高斯,其属性通过小型多层感知器(MLP)基于视图方向和距离动态预测。
- 属性预过滤策略:为了提高光栅化效率,引入了基于不透明度阈值的预过滤步骤,以减少计算负载。
实验设计与评估
研究者在多个公共数据集上对Scaffold-GS进行了全面评估,包括:
- 数据集:涵盖了从Mip-NeRF360到Tanks&Temples,再到DeepBlending和Blender合成数据集的多样化场景。
- 评估指标:采用了峰值信噪比(PSNR)、结构相似性(SSIM)、感知损失(LPIPS)等指标,以及存储大小和帧率(FPS)来衡量模型的性能和效率。
- 细节设置:设置每个voxel为10个3D高斯,MLP设置为2层,RELU激活函数,隐含层为32维度,SSIM和vol的损失权重为0.2和0.001;
- 结果分析:Scaffold-GS在保持与原始3D-GS相似的渲染速度的同时,显著减少了存储需求,并在具有挑战性的场景中展现出更好的视觉质量和鲁棒性。
结论与未来工作
Scaffold-GS通过其结构化的3D高斯和视图自适应属性预测,为3D场景渲染领域提供了一种高效的解决方案。论文还讨论了该方法的局限性,并对未来可能的改进方向进行了展望,包括在更大规模场景中的应用和对无纹理区域的处理策略。
代码及论文具体细节
如何进行锚点初始化
- 从SfM点云进行voxel初始化,生成了 V = { P ϵ } ⋅ ϵ V = \left\{ \frac{P}{\epsilon} \right\} \cdot \epsilon V={ϵP}⋅ϵ 个anchor锚点,anchor的生成就是简单的voxel采样
def create_from_pcd(self, pcd : BasicPointCloud, spatial_lr_scale : float):
self.spatial_lr_scale = spatial_lr_scale
points = pcd.points[::self.ratio]
if self.voxel_size <= 0: # 保留了原版的点云初始化
init_points = torch.tensor(points).float().cuda()
init_dist = distCUDA2(init_points).float().cuda()
median_dist, _ = torch.kthvalue(init_dist, int(init_dist.shape[0]*0.5))
self.voxel_size = median_dist.item()
del init_dist
del init_points
torch.cuda.empty_cache()
print(f'Initial voxel_size: {self.voxel_size}')
points = self.voxelize_sample(points, voxel_size=self.voxel_size) # 下采样
fused_point_cloud = torch.tensor(np.asarray(points)).float().cuda()
offsets = torch.zeros((fused_point_cloud.shape[0], self.n_offsets, 3)).float().cuda()
# anchor的feature初始化
anchors_feat = torch.zeros((fused_point_cloud.shape[0], self.feat_dim)).float().cuda()
print("Number of points at initialisation : ", fused_point_cloud.shape[0])
dist2 = torch.clamp_min(distCUDA2(fused_point_cloud).float().cuda(), 0.0000001)
scales = torch.log(torch.sqrt(dist2))[...,None].repeat(1, 6)
rots = torch.zeros((fused_point_cloud.shape[0], 4), device="cuda")
rots[:, 0] = 1
opacities = inverse_sigmoid(0.1 * torch.ones((fused_point_cloud.shape[0], 1), dtype=torch.float, device="cuda"))
# 以下变量为优化器需要进行优化的参数
self._anchor = nn.Parameter(fused_point_cloud.requires_grad_(True))
self._offset = nn.Parameter(offsets.requires_grad_(True))
self._anchor_feat = nn.Parameter(anchors_feat.requires_grad_(True))
self._scaling = nn.Parameter(scales.requires_grad_(True))
self._rotation = nn.Parameter(rots.requires_grad_(False))
self._opacity = nn.Parameter(opacities.requires_grad_(False))
self.max_radii2D = torch.zeros((self.get_anchor.shape[0]), device="cuda")
- 需要优化的参数有下面几个:
self._anchor的xyz是需要进行优化的参数,也就是anchor是需要不断调整的;self._offset是每个anchor衍生出的Gaussian的位置,代码中设置为10,每个anchor生成10个Gaussian,这里的offset相当于以anchor为原点的偏移量,感觉在代码中的表达就是方向向量;self._anchor_feat就是下面要讲的每个anchor的特征,这个特征量应该是作为MLP的输入层;self._scaling初始化是一个6维参数,前3维是offset的缩放系数,后3维表示neural-gs的cov的初值,对应论文公式8中的 l v l_v lv
# render里面的 generate_neural_gaussians函数
# post-process cov
scaling = scaling_repeat[:,3:] * torch.sigmoid(scale_rot[:,:3]) # * (1+torch.sigmoid(repeat_dist))
rot = pc.rotation_activation(scale_rot[:,3:7])
# post-process offsets to get centers for gaussians
offsets = offsets * scaling_repeat[:,:3]
xyz = repeat_anchor + offsets
self._rotation,self._opacity初始化,后续在adjust_anchor()进行更新调用
MLP如何进行初始化
-
每个锚点配置了4个小型MLP用来计算三维高斯需要优化的属性,也就是用MLP对属性进行预测,而不是原版的优化策略;MLP的初始化细节和结构可以参考代码中
GaussianModel里面的setup_functions和__init__函数。 -
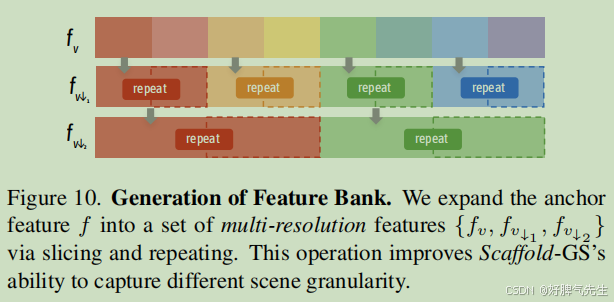
第一个MLP是feature bank的权重,是每个anchor都有的32维特征(个人感觉32就是为了方便下采样和小型网络),通过下采样扩展出另外两种特征;这个MLP就是为了这个featbank设计的,如下图
-
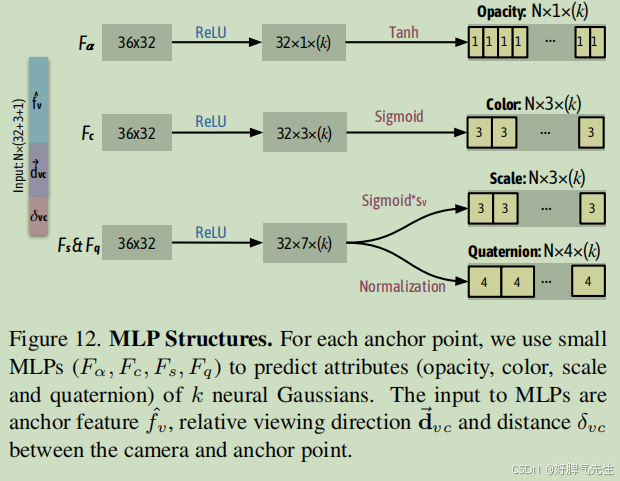
剩余3个MLP是对应了三维高斯的属性,如下图所示;N是anchor个数,由于颜色是通过MLP预测,所以没有SH系数;MLP的设计在论文的第7节。
训练过程
- 训练初始化:模型初始化,学习率设置
l = [
# 高斯参数
{'params': [self._anchor], 'lr': training_args.position_lr_init * self.spatial_lr_scale, "name": "anchor"},
{'params': [self._offset], 'lr': training_args.offset_lr_init * self.spatial_lr_scale, "name": "offset"},
{'params': [self._anchor_feat], 'lr': training_args.feature_lr, "name": "anchor_feat"},
{'params': [self._opacity], 'lr': training_args.opacity_lr, "name": "opacity"},
{'params': [self._scaling], 'lr': training_args.scaling_lr, "name": "scaling"},
{'params': [self._rotation], 'lr': training_args.rotation_lr, "name": "rotation"},
# MLP参数
{'params': self.mlp_opacity.parameters(), 'lr': training_args.mlp_opacity_lr_init, "name": "mlp_opacity"},
{'params': self.mlp_feature_bank.parameters(), 'lr': training_args.mlp_featurebank_lr_init, "name": "mlp_featurebank"},
{'params': self.mlp_cov.parameters(), 'lr': training_args.mlp_cov_lr_init, "name": "mlp_cov"},
{'params': self.mlp_color.parameters(), 'lr': training_args.mlp_color_lr_init, "name": "mlp_color"},
{'params': self.embedding_appearance.parameters(), 'lr': training_args.appearance_lr_init, "name": "embedding_appearance"},
]
# 优化器设置
self.optimizer = torch.optim.Adam(l, lr=0.0, eps=1e-15)
**# 后面为每个参数设置了学习率更新方法,和原版一致**
- 每次训练随机选择一个相机进行训练,避免过拟合
# Pick a random Camera
if not viewpoint_stack:
viewpoint_stack = scene.getTrainCameras().copy()
viewpoint_cam = viewpoint_stack.pop(randint(0, len(viewpoint_stack)-1))
- 过滤视椎体之外的anchor,并生成neural-gs
# train函数
voxel_visible_mask = prefilter_voxel(viewpoint_cam, gaussians, pipe,background)
# 生成Gaussian,这段代码在render函数里面
if is_training:
xyz, color, opacity, scaling, rot, neural_opacity, mask = generate_neural_gaussians(viewpoint_camera, pc, visible_mask, is_training=is_training)
else:
xyz, color, opacity, scaling, rot = generate_neural_gaussians(viewpoint_camera, pc, visible_mask, is_training=is_training)
- 计算anchor到相机中心的距离和方向,对应论文公式5
## get view properties for anchor
ob_view = anchor - viewpoint_camera.camera_center
# dist
ob_dist = ob_view.norm(dim=1, keepdim=True)
# view
ob_view = ob_view / ob_dist
- 高斯参数的预测,MLP的调用
cat_local_view = torch.cat([feat, ob_view, ob_dist], dim=1) # [N, c+3+1]
cat_local_view_wodist = torch.cat([feat, ob_view], dim=1) # [N, c+3]
if pc.appearance_dim > 0:
camera_indicies = torch.ones_like(cat_local_view[:,0], dtype=torch.long, device=ob_dist.device) * viewpoint_camera.uid
# camera_indicies = torch.ones_like(cat_local_view[:,0], dtype=torch.long, device=ob_dist.device) * 10
appearance = pc.get_appearance(camera_indicies)
# get offset's opacity
if pc.add_opacity_dist:# 该flag为false
neural_opacity = pc.get_opacity_mlp(cat_local_view) # [N, k]
else: # 调用此分支,用anchor的feat和方向预测高斯的opacity,输出维度[N, k]
neural_opacity = pc.get_opacity_mlp(cat_local_view_wodist)
# get offset's color, color的预测
if pc.appearance_dim > 0:
if pc.add_color_dist:
color = pc.get_color_mlp(torch.cat([cat_local_view, appearance], dim=1))
else:
color = pc.get_color_mlp(torch.cat([cat_local_view_wodist, appearance], dim=1))
else:
if pc.add_color_dist:
color = pc.get_color_mlp(cat_local_view)
else:
color = pc.get_color_mlp(cat_local_view_wodist)
# 颜色矩阵改为[N*k, 3],对应到每个三维高斯
color = color.reshape([anchor.shape[0]*pc.n_offsets, 3])# [mask]
# get offset's cov协方差预测
if pc.add_cov_dist:
scale_rot = pc.get_cov_mlp(cat_local_view)
else: # 使用该分支,输入35维参数,输出为70维
scale_rot = pc.get_cov_mlp(cat_local_view_wodist)
scale_rot = scale_rot.reshape([anchor.shape[0]*pc.n_offsets, 7]) # [mask]
# post-process cov,协方差分解为旋转和scaling
scaling = scaling_repeat[:,3:] * torch.sigmoid(scale_rot[:,:3]) # * (1+torch.sigmoid(repeat_dist))
rot = pc.rotation_activation(scale_rot[:,3:7])
# post-process offsets to get centers for gaussians
# 将scaling作用到生成的offset赋给每一个高斯生成xyz
offsets = offsets * scaling_repeat[:,:3]
xyz = repeat_anchor + offsets
- 学习率更新,主要的更新函数为原版代码中的
get_expon_lr_func,具体公式参考之前的3DGS文章解析;
anchor的调整
统计模型信息training_statis 函数
- 更新了anchor调整中用到的不透明度累计值
self.opacity_accum,锚点观测数量self.anchor_demon,offset的梯度累积值self.offset_gradient_accum,offset观测次数self.offset_denom四个变量
锚点调整函数adjust_anchor()
self.offset_gradient_accum是所有视角下可见高斯的梯度累积,在这里对所有视角下的高斯统一再次进行归一化;根据每个offset数量过滤生成一个新的offsetmask,计数超过40的考虑增加anchor;
# adding anchors
grads = self.offset_gradient_accum / self.offset_denom # [N*k, 1]
grads[grads.isnan()] = 0.0
grads_norm = torch.norm(grads, dim=-1)
# threshold = 40
offset_mask = (self.offset_denom > check_interval*success_threshold*0.5).squeeze(dim=1)
self.anchor_growing(grads_norm, grad_threshold, offset_mask)
-
anchor_growing(),也就是锚点的分割;- 通过阶数 i ∈ ( 0 , 1 , 2 ) i\in (0,1,2) i∈(0,1,2)来控制梯度阈值( i i i对应论文公式中的 m m m),random pick的比例,voxel的尺寸,0阶不进行anchor的增加;(这里控制anchor生成条件,可以考虑优化)
- 根据voxel(几倍的voxelsize)确定Gaussian和anchor的grid坐标,并对高斯的grid坐标去重;( v o x e l _ s i z e ⋅ ( u p d a t e _ i n i t _ f a c t o r u p d a t e _ h i e r a c h y _ f a c t o r i ) voxel\_size \cdot (\frac{update\_init\_factor}{{update\_hierachy\_factor}^i}) voxel_size⋅(update_hierachy_factoriupdate_init_factor))
- 从高斯的grid坐标中去掉anchor坐标(代码采用分块并行,否则可能会显存爆炸),生成新的anchor;
- 新anchor的初始化和模型初始化的设置一致,参考
create_from_pcd()
# update threshold,i是当前阶数,update_hierachy_factor=0.0002 cur_threshold = threshold*((self.update_hierachy_factor//2)**i) # mask from grad threshold candidate_mask = (grads >= cur_threshold) candidate_mask = torch.logical_and(candidate_mask, offset_mask) # random pick rand_mask = torch.rand_like(candidate_mask.float())>(0.5**(i+1)) rand_mask = rand_mask.cuda() candidate_mask = torch.logical_and(candidate_mask, rand_mask) -
更新新增anchor下面的高斯梯度,全部赋值为0
-
anchor删减:a)透明度小于阈值;b)anchor个数大于阈值;两者取交集,即为anchor的
prune_mask -
根据
prune_mask再次更新anchor扩增的offset梯度及个数; -
根据
prune_mask重新计算opacity_accum和anchor_demon;
参考文献
- 论文解读:https://zhuanlan.zhihu.com/p/682414775
- 代码链接:https://github.com/city-super/Scaffold-GS
- 源码解读:https://blog.csdn.net/qq_41623632/article/details/137602801



















 725
725

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









