







 本文介绍了自控系统的控制模型、常见输入信号如单位脉冲、阶跃信号等及其在典型二阶反馈系统中的响应,强调了时域和频域分析的重要性,以及拉普拉斯变换的应用。虽然部分内容理论性强,但对于理解自控原理有基础价值。
本文介绍了自控系统的控制模型、常见输入信号如单位脉冲、阶跃信号等及其在典型二阶反馈系统中的响应,强调了时域和频域分析的重要性,以及拉普拉斯变换的应用。虽然部分内容理论性强,但对于理解自控原理有基础价值。
上一篇内容:自控的类型分类,评价参数指标、几种系统建模方法,传递方程,拉普拉斯变换等。
这一篇了解典型的控制模型、常见的输入信号、典型二阶反馈系统响应、系统稳定性、根轨迹等,林佩群的线上课还有一章是关于反馈系统的特性的(包括误差分析等,但看完觉得并没有在应用中直接使用到,而且都是公式推导,所以只过一遍,有兴趣的可以去认真看完)。
总体上,自控系统的分析主要从时域(就算根据时间输入与输出的变换)和频域(就算进行拉普拉斯变换成频率域)两方面去分析系统的特性。频域视角主要是分析其拉普拉斯变换后的传递函数去分析。
本文参考了控制系统分析与设计(四):典型环节的数学模型_控制系统惯性环节-CSDN博客
一、常见的典型输入信号
后面在应用中,都没怎么看到直接应用这一块知识点,基本上属于自控原理的一些基础知识,为了加深对自控系统的理解吧
1.单位脉冲 Unit impulse

2.阶跃信号 Step
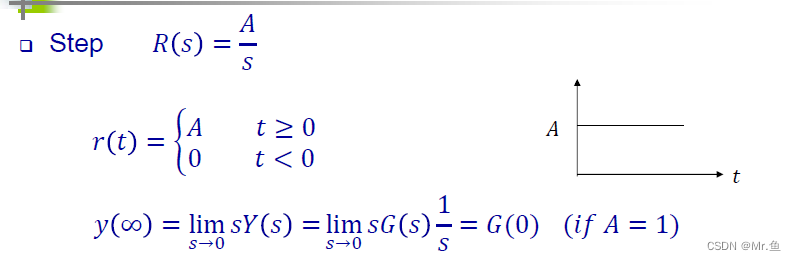
单位阶跃(A=1)是脉冲信号函数对时间的积分,单位脉冲函数是单位阶跃函数对时间的导数。
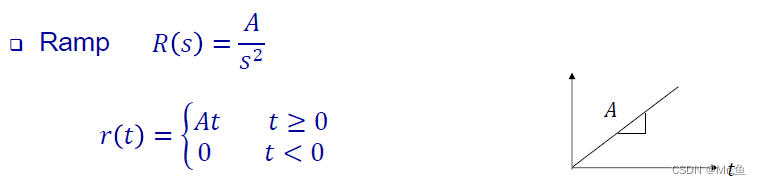
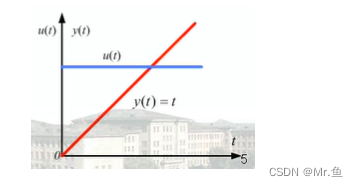
3.斜坡信号 Ramp
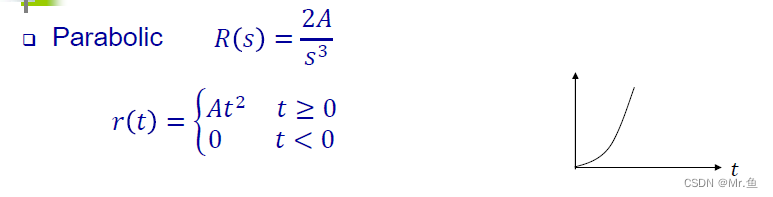
4.抛物线信号 Parabolic
5. Polynomial 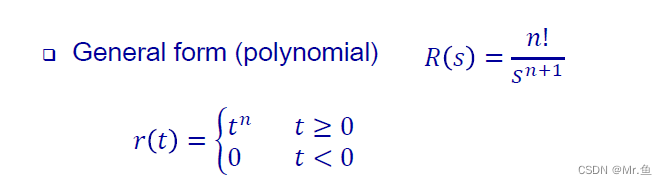
6.正弦波信号
一、常见的典型控制单元(部件)
1.比例环节(放大环节)
 这里的U(s)跟之前的R(s)一样表示输入,
这里的U(s)跟之前的R(s)一样表示输入,
2.惯性环节(输出量不能立即跟随输入量变换),一阶系统
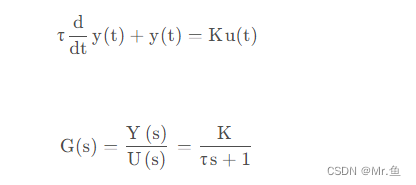
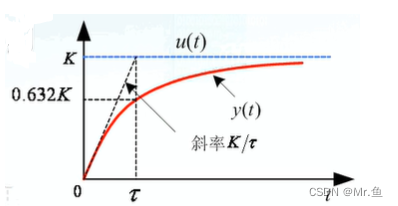
其中τ是时间常数,k为比例系统,τ越达,惯性越大,一般t=3τ~4τ时输出量接近稳态值
阶跃信号输入的 惯性环节:
3.积分环节
K-比例系数,T-积分时间常数
阶跃信号输入的 积分环节
4.微分环节
![]()
τ -时间常数, 微分环节不单独使用,都是联合惯性环节等其他环节联合使用
5.震荡环节
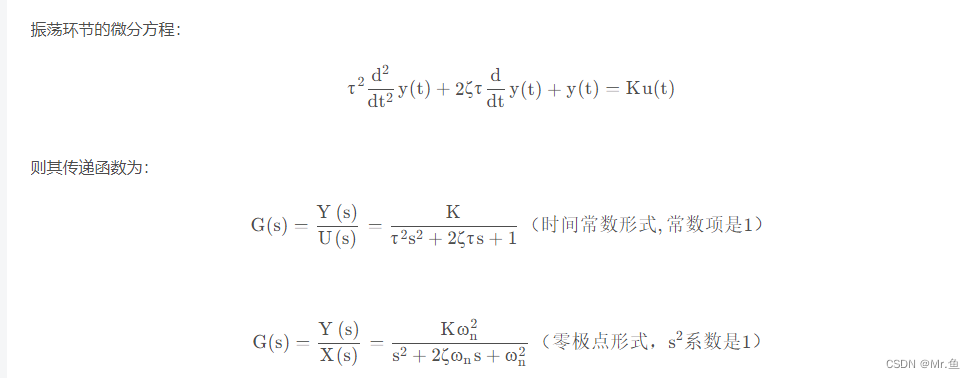
ζ为阻尼系数、阻尼比;
ωn为无阻尼自然振荡频率 ; 阻尼自然振荡频率
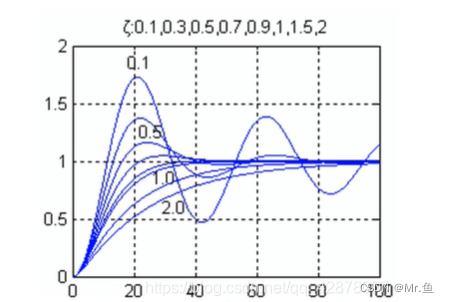
阶跃信号下的震荡环节响应:
6.震荡环节(输出比输入之后τ)
其中τ - 滞后时间常数















 896
896











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









