







1.概述
Dobot Magician
机械臂是一款桌面级智能机械臂,支持示教再现、脚本控制、
Blockly
图形化编程、写字画画、激光雕刻、3D
打印、视觉识别等功能,还具有丰富的
I/O
扩展接口,供用户二次开发时使用。
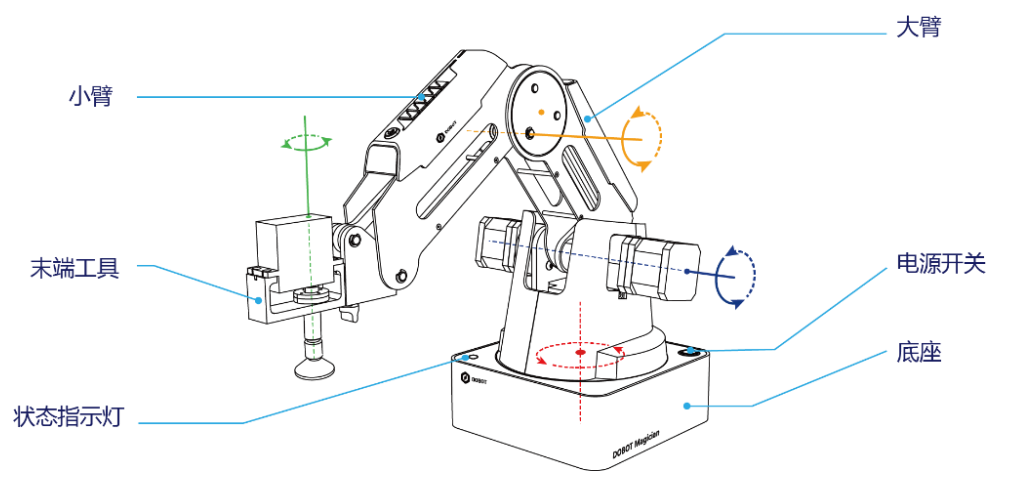
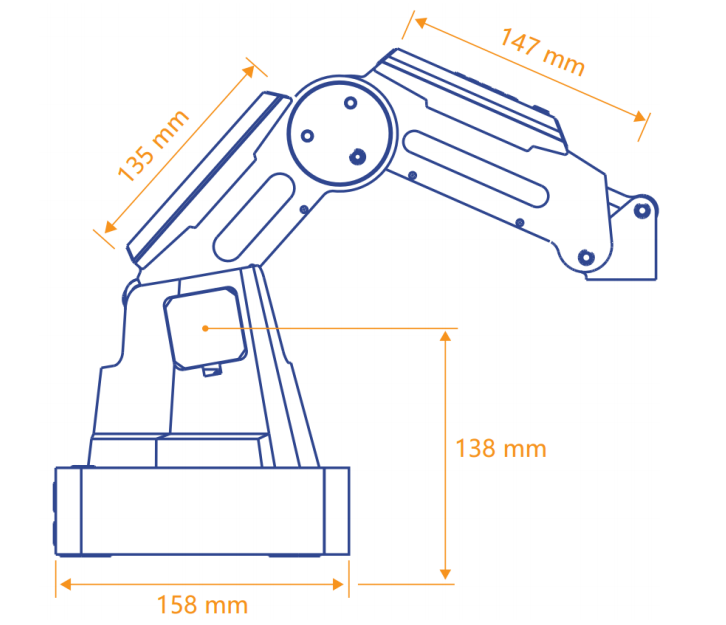
2.产品外观及构成
Dobot Magician
由底座、大臂、小臂、末端工具等组成,外观如图
3.工作原理及规格
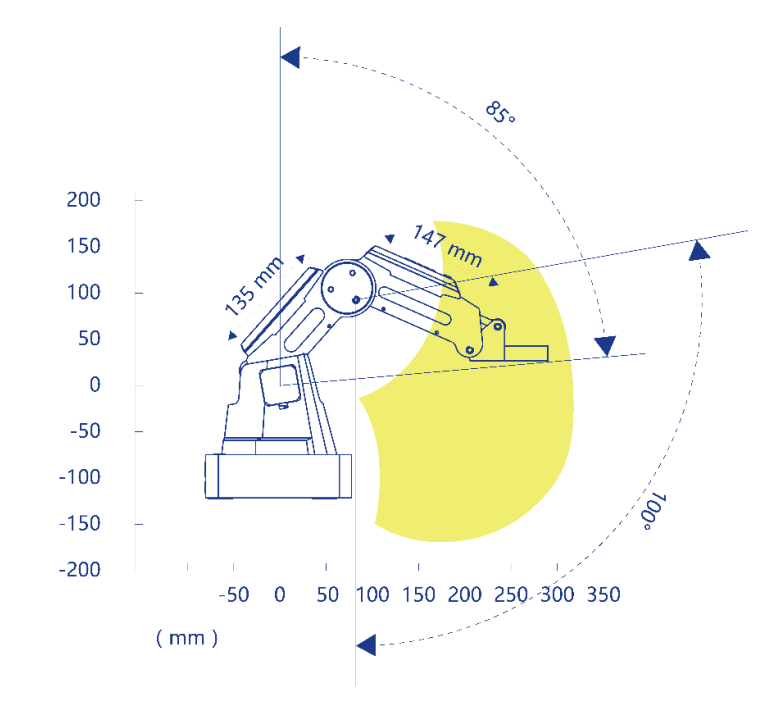
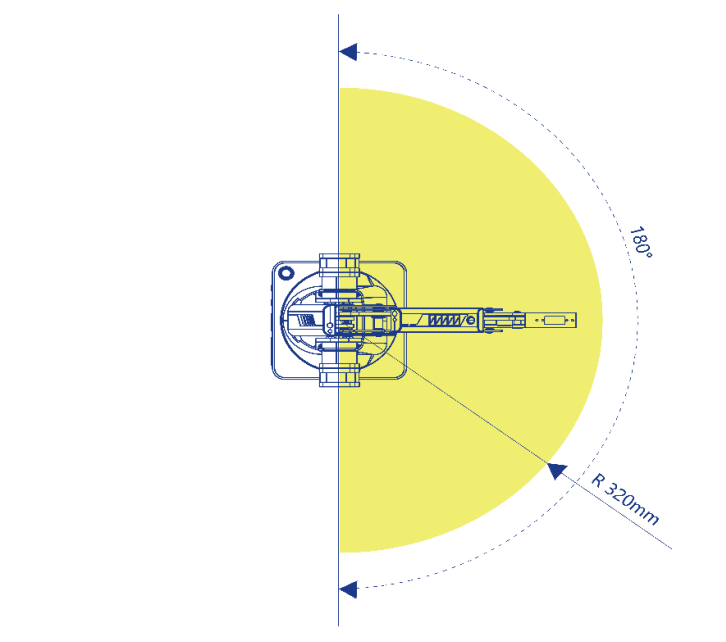
3.1工作空间
Dobot Magician
的工作空间如图
所示。
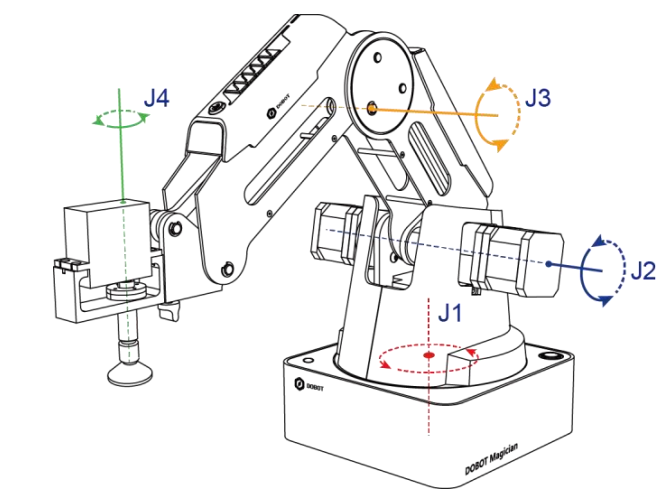
3.2坐标系
Dobot Magician
的坐标系可分为关节坐标系和笛卡尔坐标系。
关节坐标系:以各运动关节为参照确定的坐标系。
若
Dobot Magician
未安装末端套件,则包含三个关节:
J1
、
J2
、
J3
,且均为旋转关节,逆时针为正。
若
Dobot Magician
安装带舵机的末端套件,如吸盘和夹爪套件,则包含四个关节:J1
、
J2
、
J3
和
J4
,均为旋转关节,逆时针为正。
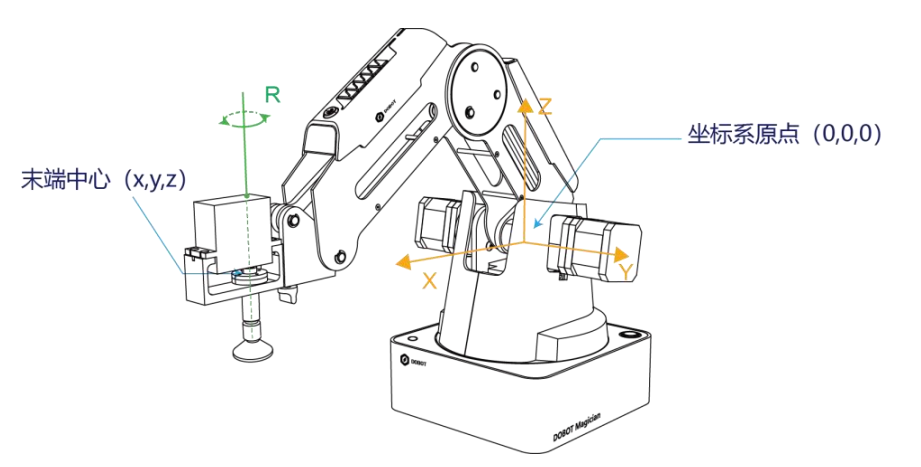
笛卡尔坐标系:以机械臂底座为参照确定的坐标系。
坐标系原点为大臂、小臂以及底座三个电机三轴的交点。
X轴方向垂直于固定底座向前。
Y轴方向垂直于固定底座向左。
Z轴符合右手定则,垂直向上为正方向。
R
轴为末端舵机中心相对于原点的姿态,逆时针为正。当安装了带舵机的末端套件时,才存在R
轴。
R
轴坐标为
J1
轴和
J4
轴坐标之和。
3.3运动功能
机械臂运动模式包括点动模式、点位模式(
PTP
)、圆弧运动模式(
ARC
)。
PTP
和
ARC
可总称为存点再现运动模式。
3.3.1点动模式
点动模式即示教时移动机械臂的坐标系,使机械臂移动至某一点。
Dobot Magician
的坐
标系可分为笛卡尔坐标系和关节坐标系,用户可单击笛卡尔坐标系按钮或关节坐标系按钮移
动机械臂。
3.3.2点位模式(PTP)
点位模式即实现点到点运动,
Dobot Magician
的点位模式包括
MOVJ
、
MOVL
以及
JUMP
三种运动模式。不同的运动模式,示教后存点回放的运动轨迹不同。
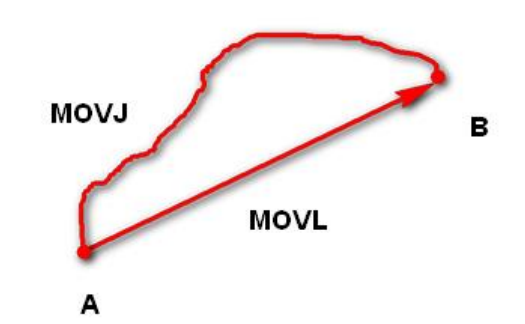
MOVJ :关节运动,由 A 点运动到 B 点,各个关节从 A 点对应的关节角运行至 B 点对应的关节角。关节运动过程中,各个关节轴的运行时间需一致,且同时到达终点,如图所示。MOVL :直线运动, A 点到 B 点的路径为直线,如图 所示。JUMP :门型轨迹, A 点到 B 点以 MOVJ 运动模式移动,如图 所示。以MOVJ 运动模式上升到一定高度( Height )。以MOVJ 运动模式平移到 B 点上方的高度处。以MOVJ 运动模式下降到 B 点所在位置。

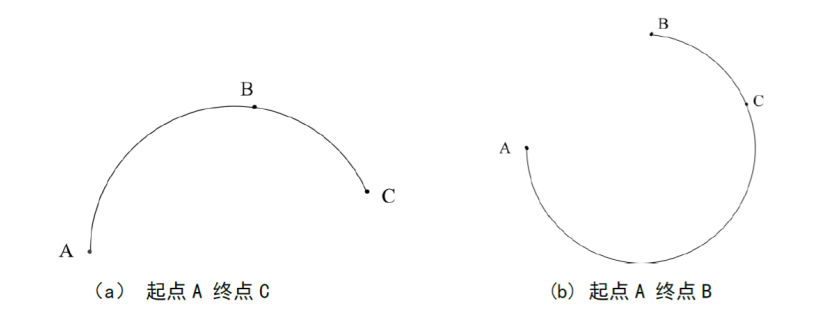
3.3.3圆弧模式(ARC)
圆弧模式即示教后存点回放的运动轨迹为圆弧。圆弧轨迹是空间的圆弧,由当前点、圆弧上任一点和圆弧结束点三点共同确定。圆弧总是从起点经过圆弧上任一点再到结束点,如图
所示。
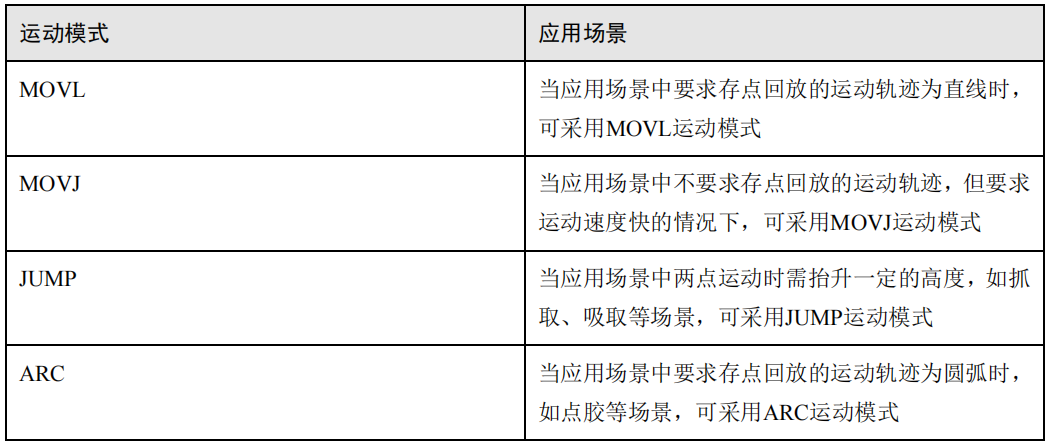
3.3.4应用场景
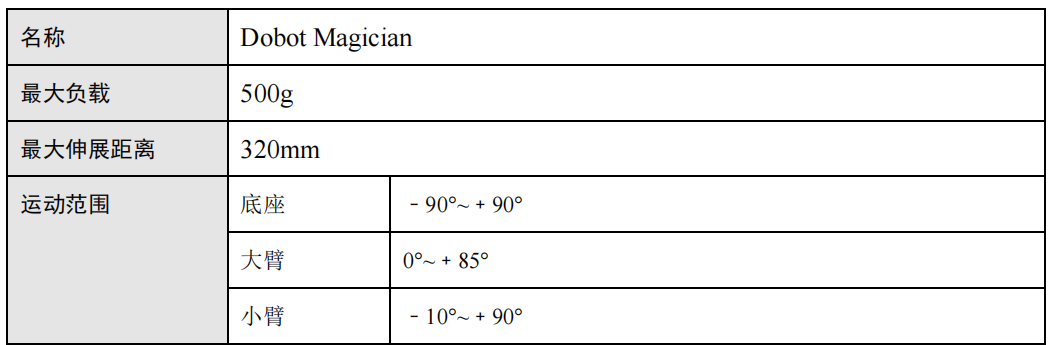
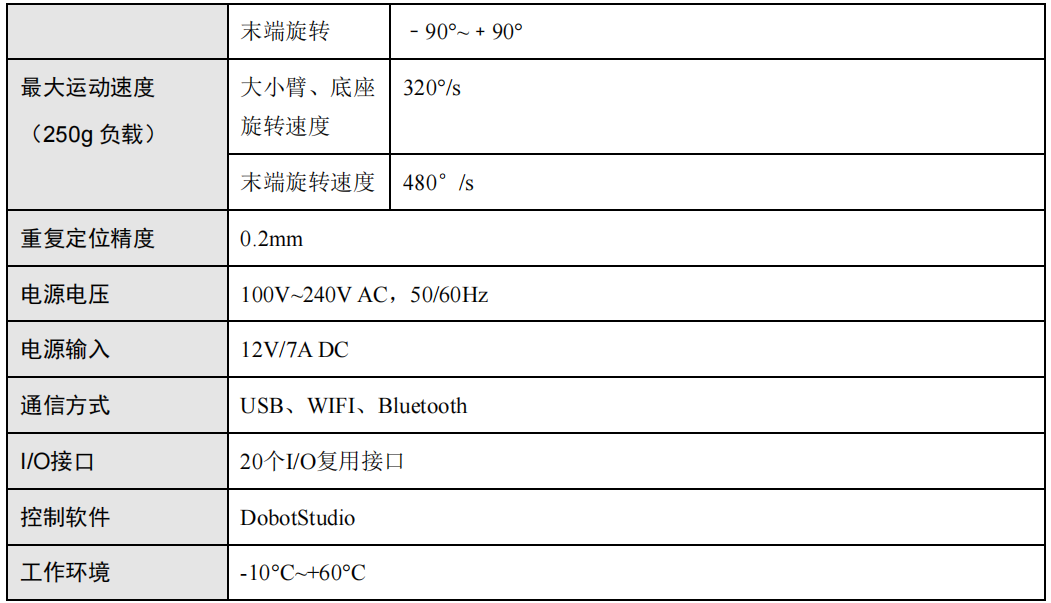
3.4技术规格
3.4.1技术参数
3.4.2 尺寸参数


















 1833
1833

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











