







深度相机,双目测距法,三维结构光,TOF,飞行时间法,3D结构光
三种3D技术——结构光、双目视觉和飞行时间(ToF)传感器,在现代科技应用中扮演着重要角色,每种技术都有其独特的工作原理、应用场景和算法支持。
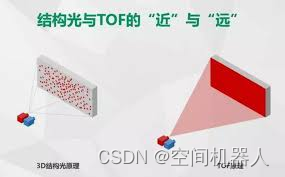
1. 结构光(Structured Light)
定义和工作原理: 结构光是一种通过投射特定模式的光束到目标表面,并通过观察这些模式的变化来计算深度和形状的方法。通常使用激光或LED发射器来发射光束,然后通过相机捕捉反射的图案变化。
举例说明: 例如,Apple的Face ID功能使用了结构光技术来创建面部的深度地图,确保识别的准确性和安全性。
比喻: 结构光可以比作在目标表面上投射一种特定的编码,然后观察编码的反馈变化,如同人类用眼睛观察物体表面的纹理来推测物体的形状和深度。
应用: 在人脸识别、虚拟现实和增强现实、工业测量等领域广泛应用,用于精确测量和建模。
算法: 结构光算法通常包括图案生成和变化分析,主要包括相位解码和三维重建算法,如相位移法、三角测量等。
2. 双目视觉(Stereo Vision)
定义和工作原理:</
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章



















 726
726

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











