







 本文详细介绍了工业机器人控制系统的各个关键组成部分,包括人机交互模块、数字控制核心、可编程逻辑控制和数据通信模块,探讨了实时网络通信的重要性。此外,还分析了基于PLCOpen和CNC的软件架构,以及工业PC和嵌入式平台的硬件架构。在选择实时操作系统时,考虑了生态、维护和工具链等因素,并通过具体案例展示了控制系统的设计流程,包括硬件平台和软件平台的搭建。
本文详细介绍了工业机器人控制系统的各个关键组成部分,包括人机交互模块、数字控制核心、可编程逻辑控制和数据通信模块,探讨了实时网络通信的重要性。此外,还分析了基于PLCOpen和CNC的软件架构,以及工业PC和嵌入式平台的硬件架构。在选择实时操作系统时,考虑了生态、维护和工具链等因素,并通过具体案例展示了控制系统的设计流程,包括硬件平台和软件平台的搭建。
声明:本文为张晓辉博士在睿慕课开设的《工业机器人控制系统的设计》公开课学习笔记,版权归原作者及睿慕课所有,如有侵权,请联系删除。
文章目录
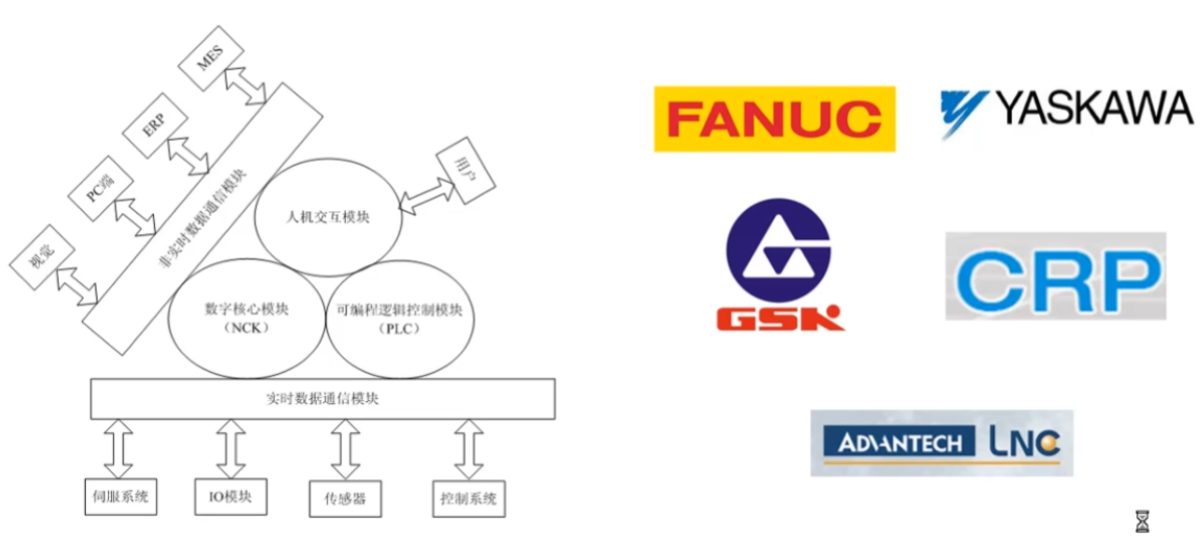
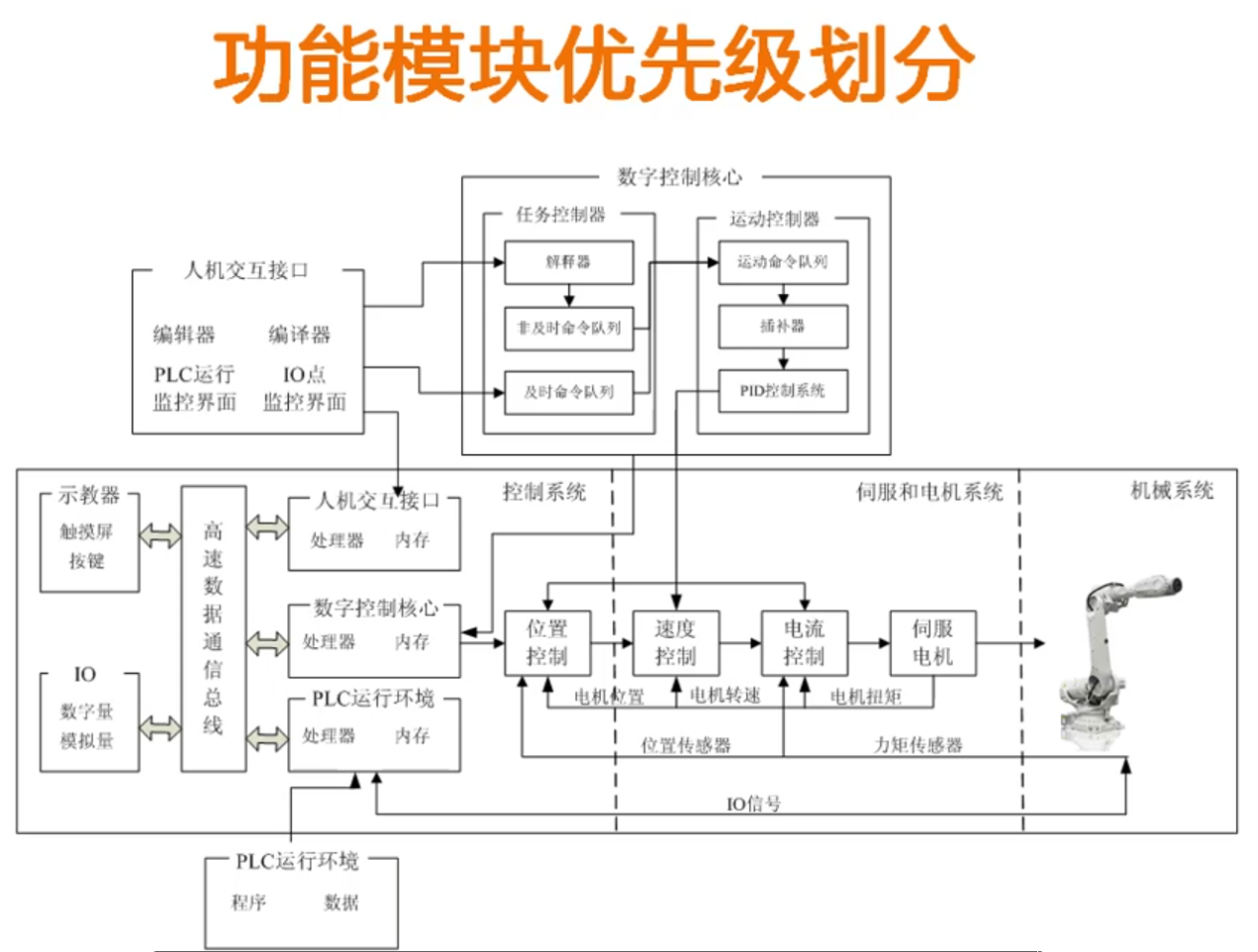
第2章 控制系统功能组成
2-1 人机交互模块
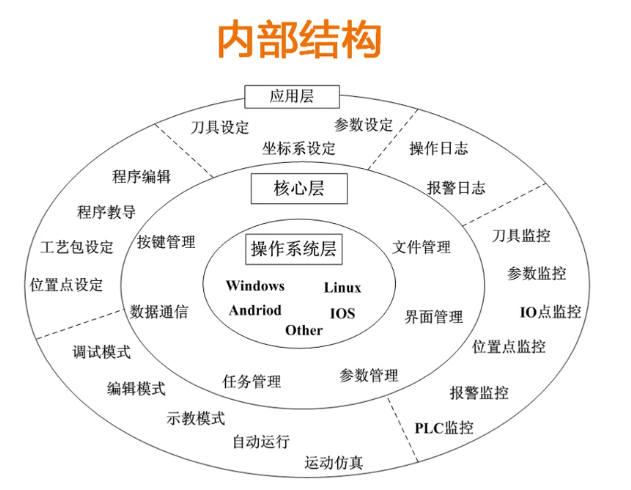
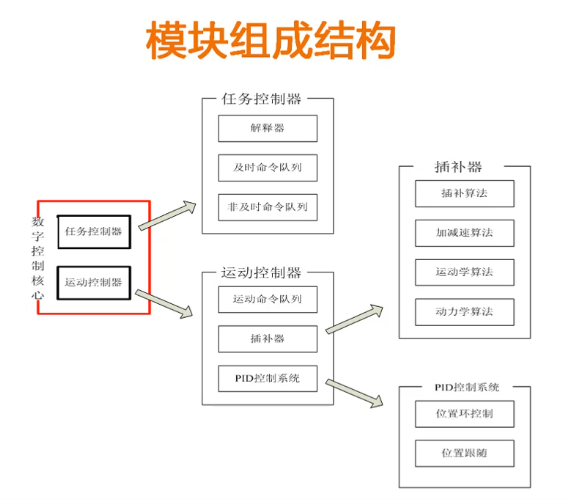
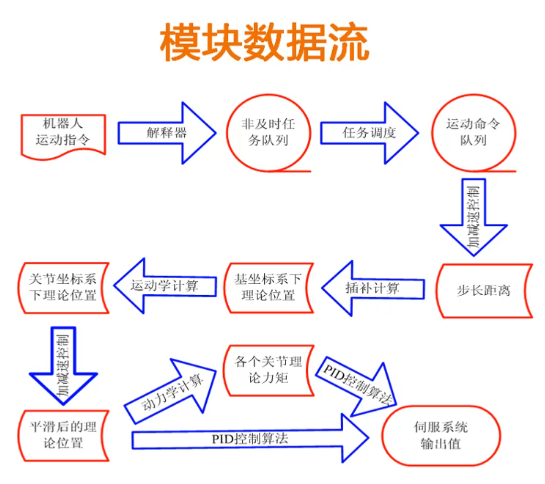
2-2 数字控制核心模块
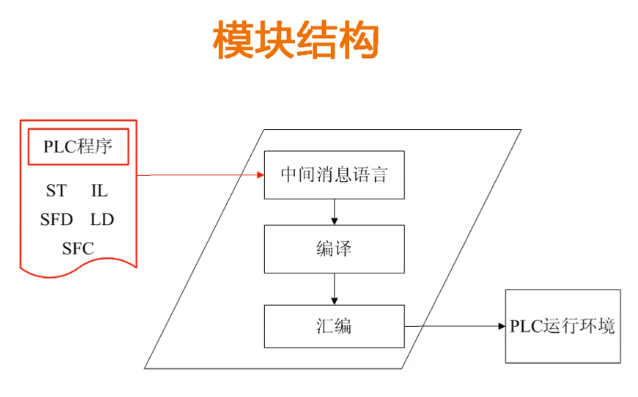
2-3 可编程逻辑控制模块
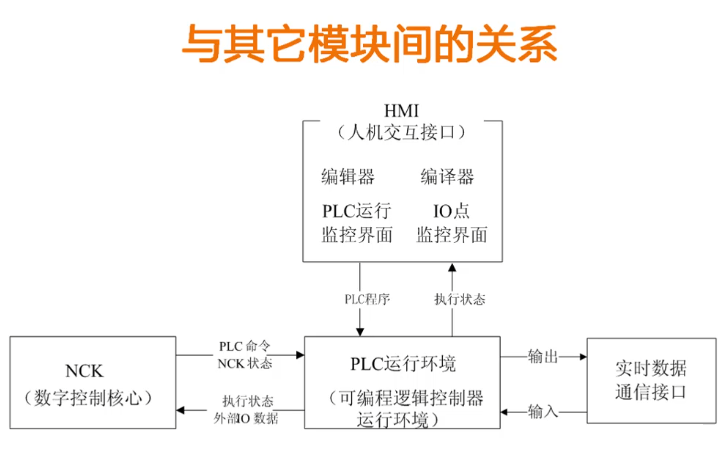
2-4 数据通信模块
- 非实时网络通信
- 实时网络通信

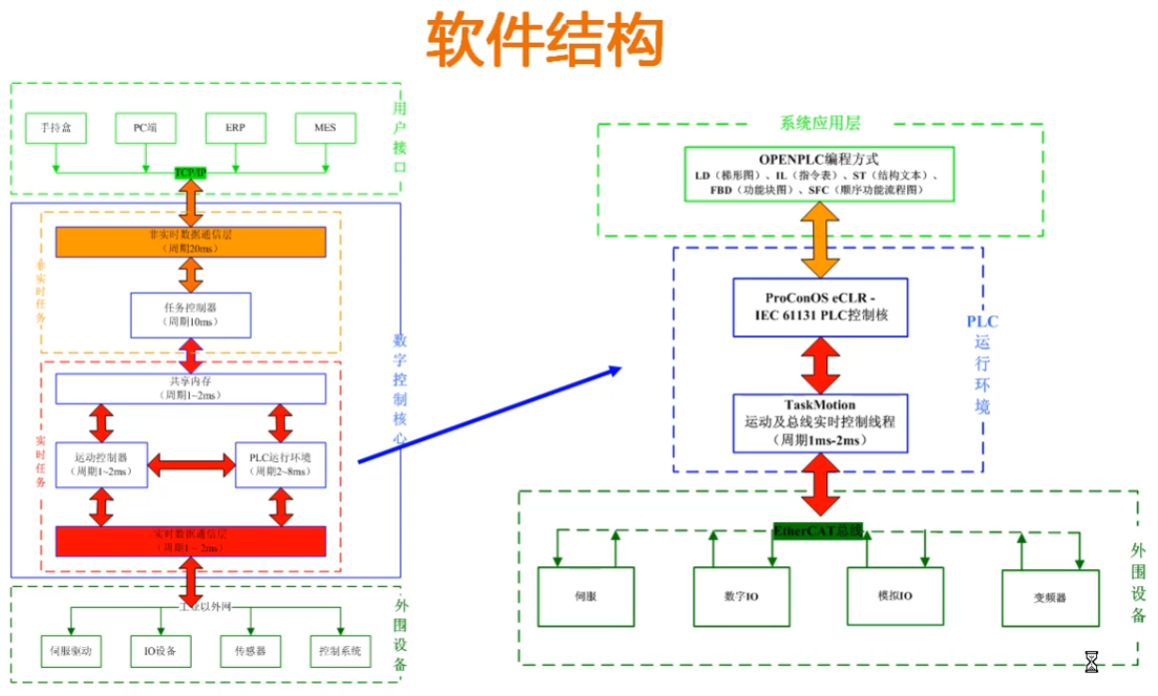
第3章 控制系统软件架构
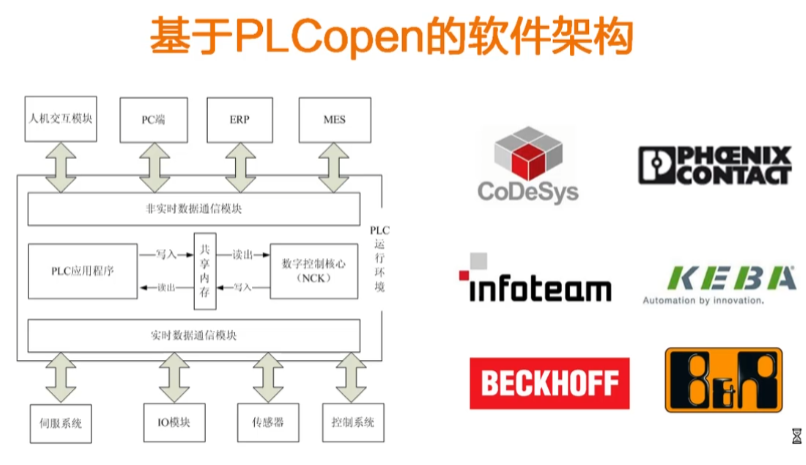
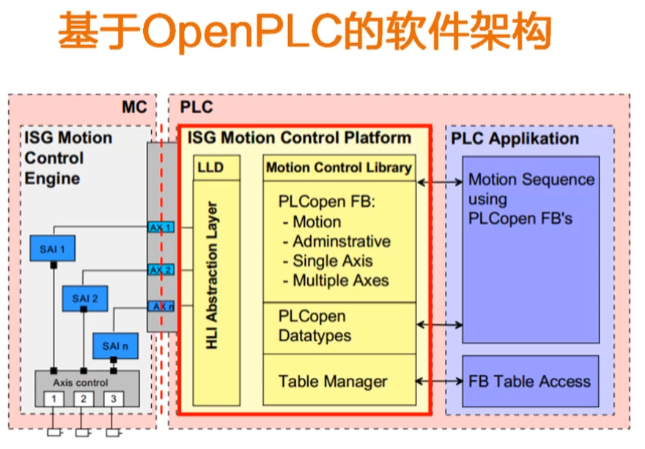
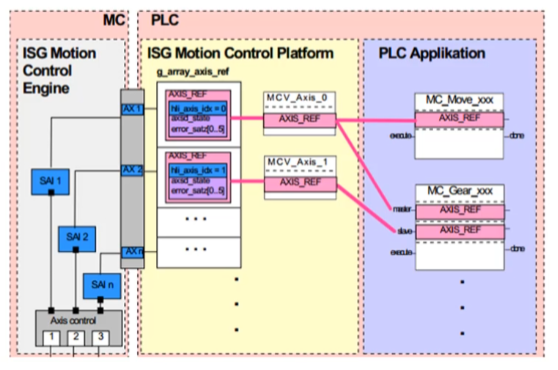
3-1 基于PLCOpen的软件架构
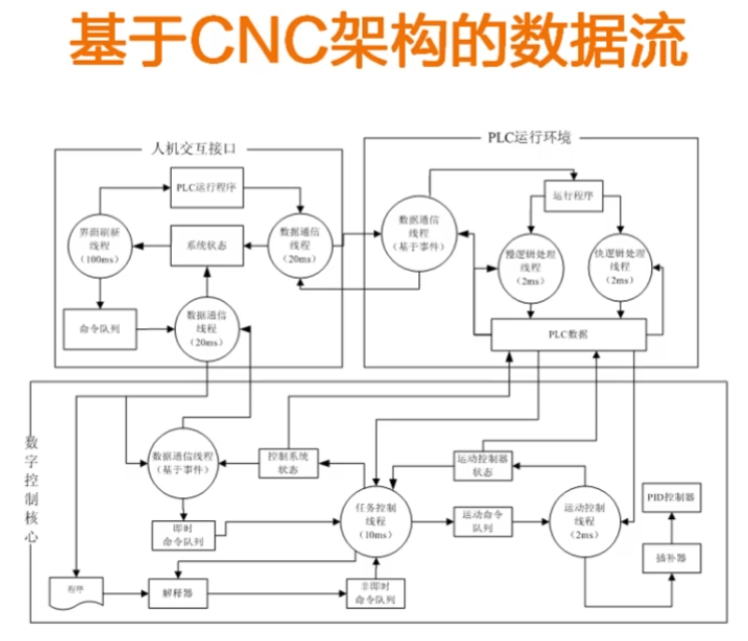
3-2 基于CNC的软件架构
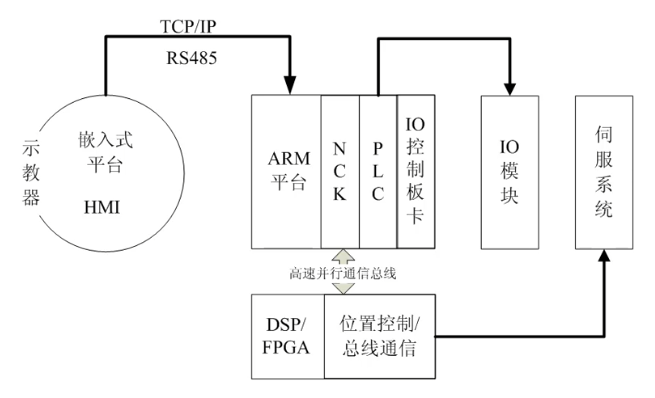
第4章 控制系统硬件架构
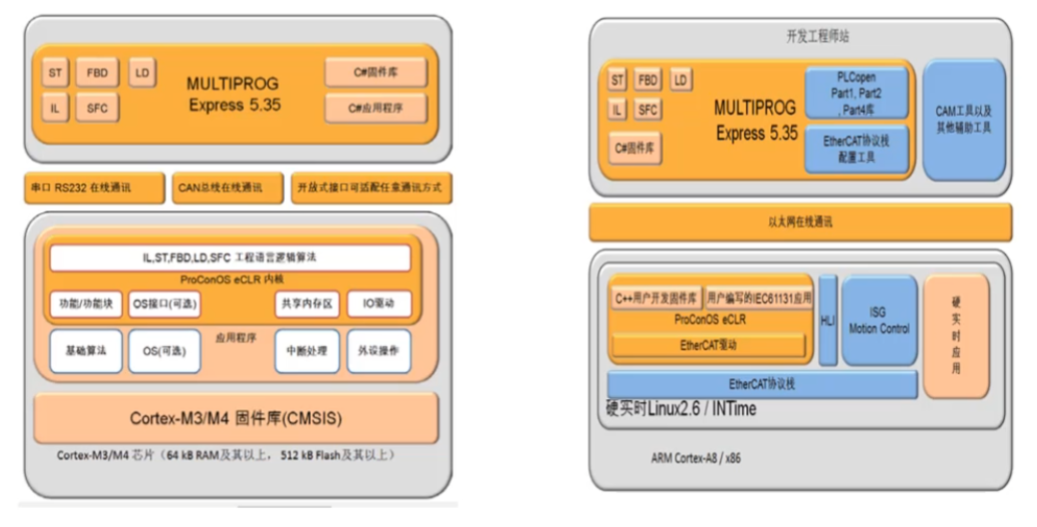
4-1 基于工业PC平台的硬件架构
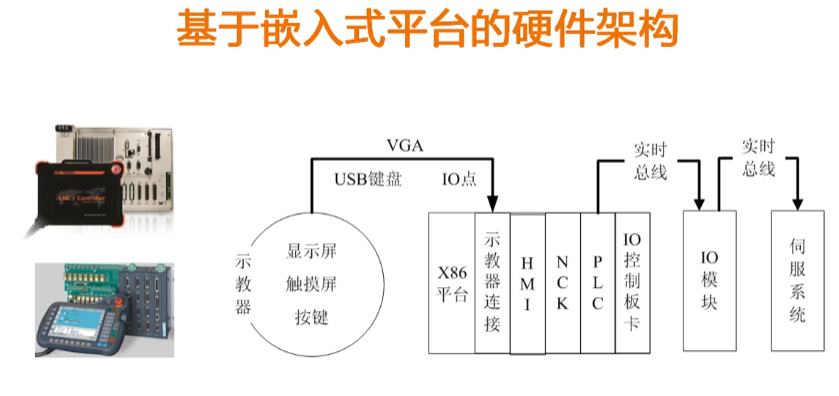
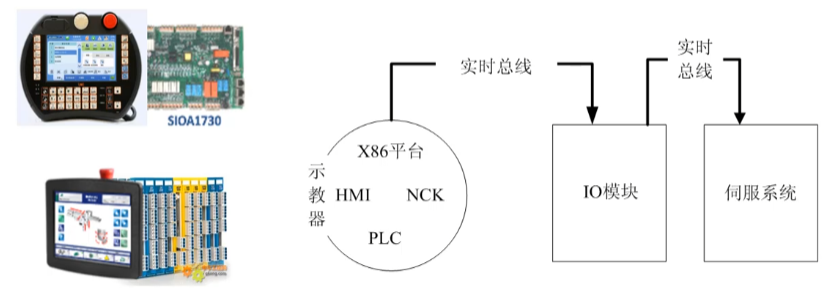
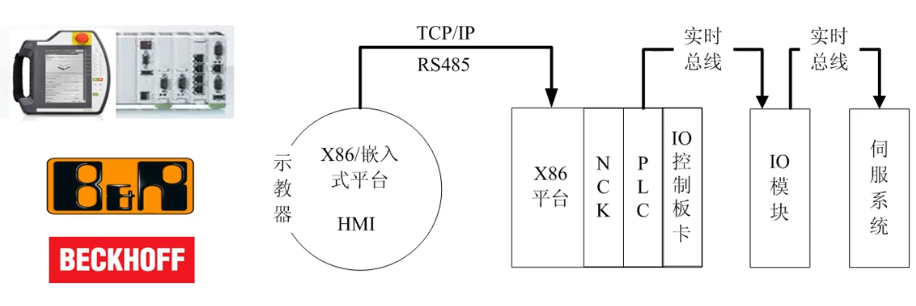
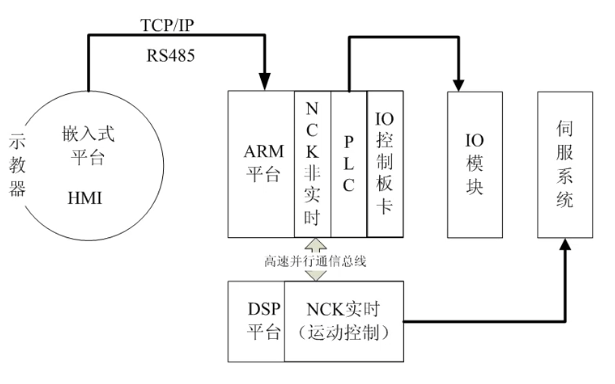
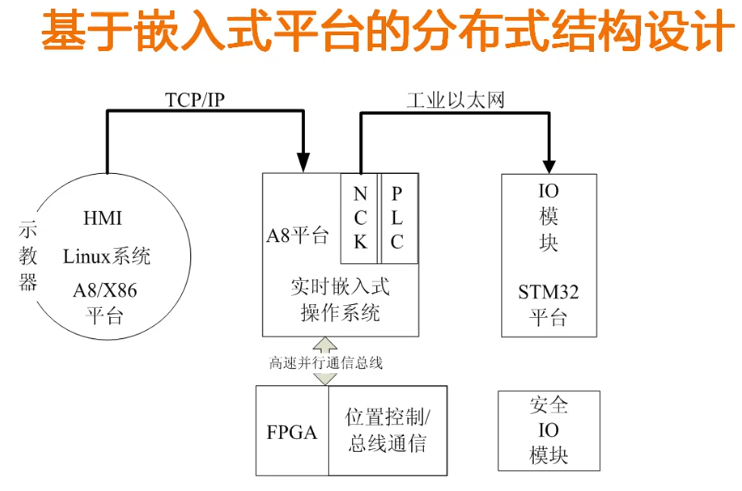
4-2 基于嵌入式平台的硬件架构
第5章 实时操作系统

注意:选择操作系统时要考虑生态问题?有无厂商进行维护?有没有完整的工具链?
第6章 机器人控制系统设计案例
6-1 硬件平台的设计

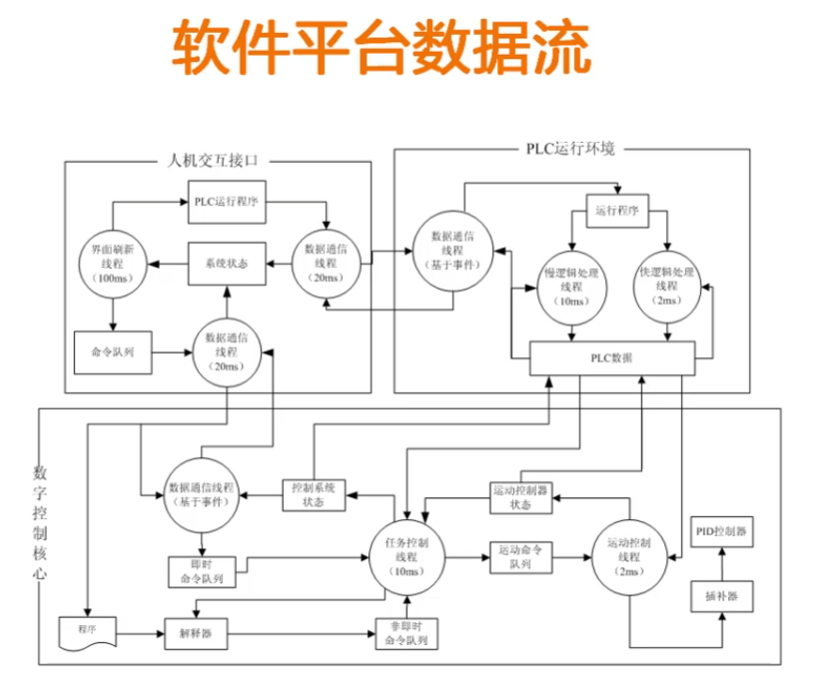
6-2 软件平台的搭建
张博他们自研的软件架构:

















 8418
8418

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









