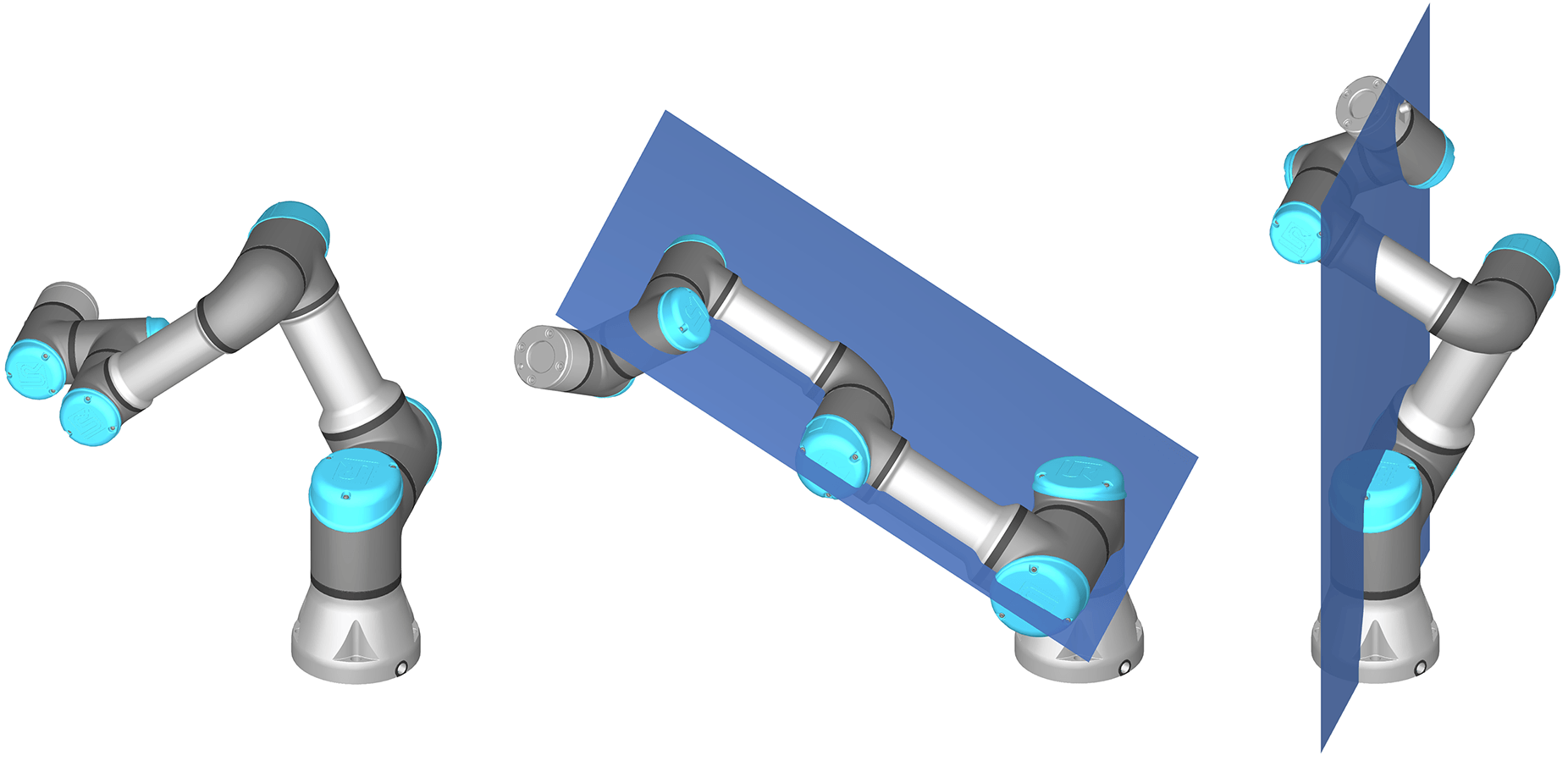
关节4与关节6平行时,发生腕部奇异关节234共面时,发生肘部奇异关节56交点在过关节1轴线且平行关节2轴线的平面内时,发生肩部奇异 下面这段视频说明了UR构型机器人奇点的三种类型。 参考链接: https://www.mecademic.com/academic_articles/singularities-6-axis-robot-arm/https://www.youtube.com/watch?v=6Wmw4lUHlX8

























 1600
1600

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言


 被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言
被折叠的 条评论
为什么被折叠?
到【灌水乐园】发言






