







从第三课开始,终于到了系列课程的最核心部分啦!
1. 定位简介
定位是让无人车知道自己确切位置的方法。大家肯定不会想坐上一辆不知道自己在哪的车吧23333!
GPS的定位精度通常在1~3m,这对于无人车来说是远远不够的。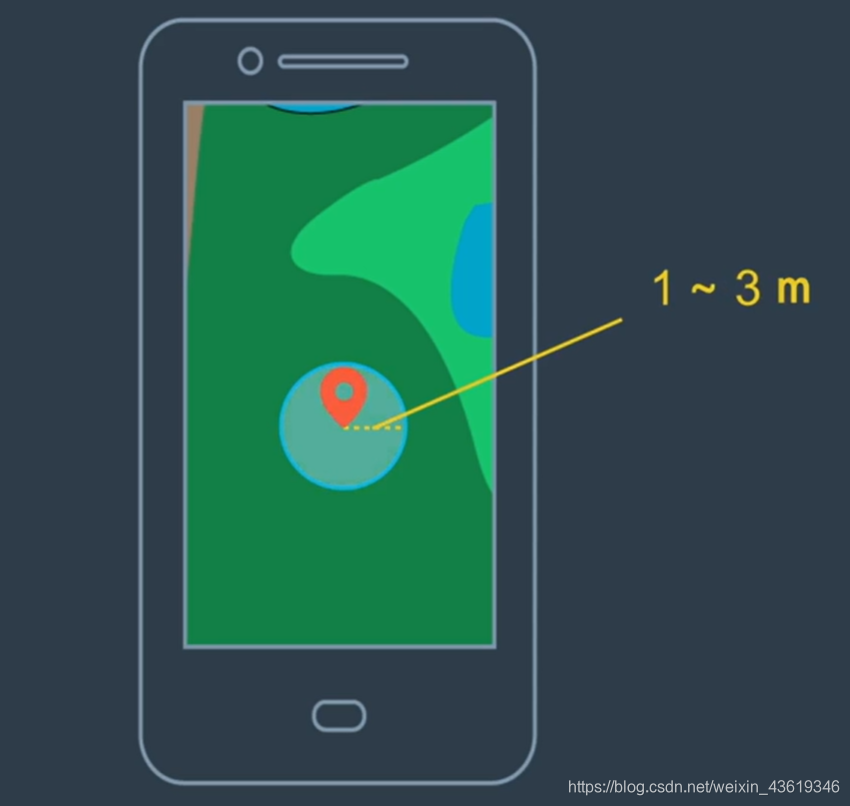
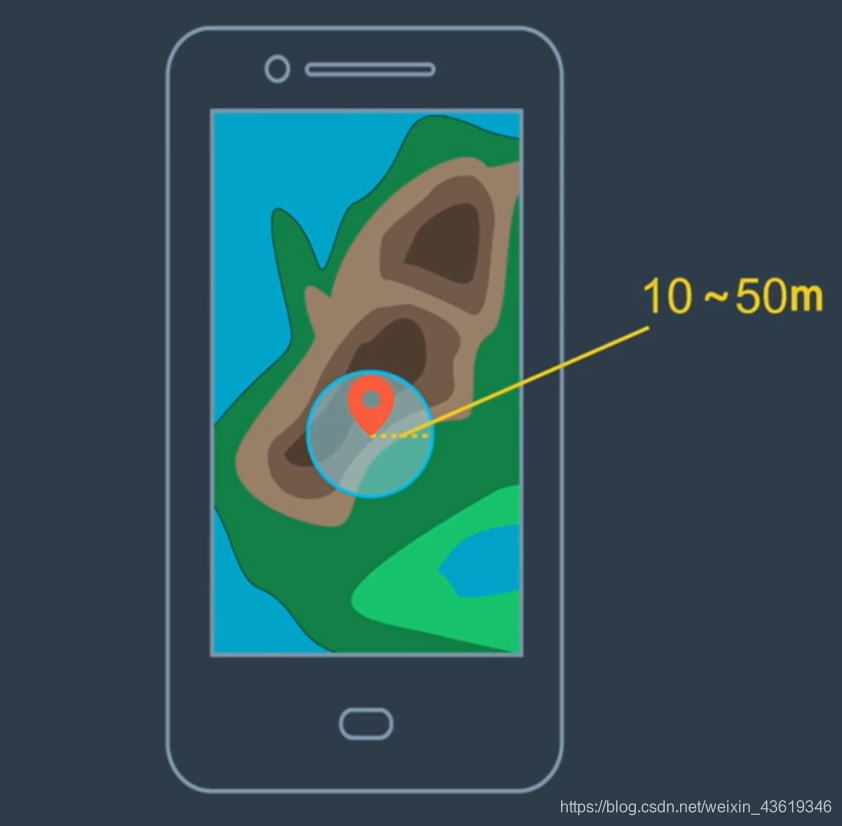
而且如果周围是高楼、峡谷、山脉,则GPS的精度会更差:通常是在10~50m。
所以我们无法只靠GPS来确定定位信息,我们需要一种更为精确的方法。通常的做法是将汽车传感器所看到的内容与地图上的内容进行比较(上一课高精地图的内容)。车辆的传感器可以测量车辆与静态障碍物(比如树木、路标、电线杆、墙壁)之间的距离。
我们在车辆自身的坐标系中测量这些距离以及这些静态障碍物的方向,在车辆坐标系中,汽车的前进方向始终向前。在汽车左转或者右转时,坐标系也随之旋转,使得汽车方向能够始终向前。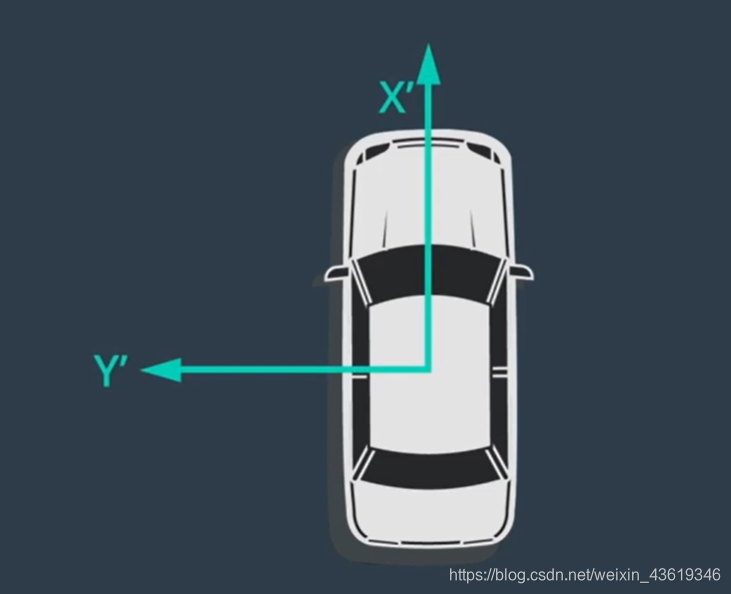
然而随着汽车的旋转,车辆坐标系必然会与地图坐标系不一致。车辆坐标系和地图坐标系可能均取决于导航系统中的设置,所以要明白坐标系的切换(ros里典型的tf变换)。
在传感器找到地图上的路标时,我们就要进行坐标的匹配,传感器需要将测量值转换为地图坐标系下的值,反之亦然,这是解决定位问题中非常重要的一步。
 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章
















 2895
2895











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









