







【本学期选修国科大计算机视觉课程,本人方向也是cv,因此想通过博客方式记录课程中比较重要的点,巩固并且进行一些扩展学习】
【从本章节开始由董秋雷老师为我们讲述相关知识】
【本章节内容针对视觉跟踪进行讲解】
接下来我们将主要针对以下内容进行介绍:
目标跟踪
模板匹配法
基于Kalman滤波器的跟踪方法
基于相关滤波的跟踪方法
基于CNN的跟踪方法
视觉定位
基于Kalman滤波器的定位方法
基于关键帧的定位方法
运动分析的一般流程
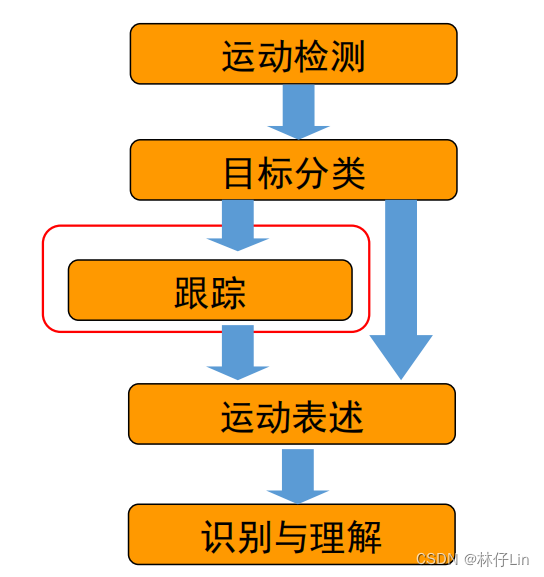
Tracking
目标跟踪:在图像序列中持续地估计出感兴趣的运动目标所在区域(位置),形成运动目标的运动轨迹;有时还需要估计出运动目标的某些运动参数 (比如速度、加速度等)。
相机跟踪(摄像机定位):通过图像序列,持续地 计算出相机的位置、姿态,如SLAM(Simultaneous Localization And Mapping,同步定位与地图创建)
目标跟踪问题分类
场景中运动目标的数目: 单运动目标 vs. 多运动目标
在多目标跟踪过程中,必须考虑到多个目标在场景中会互相遮挡(Occlusion),合并(Merge),分离
(Split)等情况。
多目标跟踪中的数据关联问题(Data Association)。
摄像机的数目: 单摄像机 vs. 多摄像机
多摄像机有望解决因相互遮挡导致的运动目标丢失问题,但多摄像机的信息融合是一个关键性问题。
摄像机是否运动: 摄像机静止 vs. 摄像机运动
摄像机的运动形式,一种是摄像机支架固定,摄像机可以偏转(Pan),俯仰(Tilt)以及缩放(Zoom);另一种是摄像机装在移动载体上,如车辆、飞机。
摄像机的运动增加了运动目标检测的难度。
场景中运动目标的类型: 刚体 vs. 非刚体
交通车辆-刚体; 人-非刚体。
传感器的种类: 可见光图像 vs. 红外图像
白天使用可见光图像;晚上使用红外图像。
目标跟踪
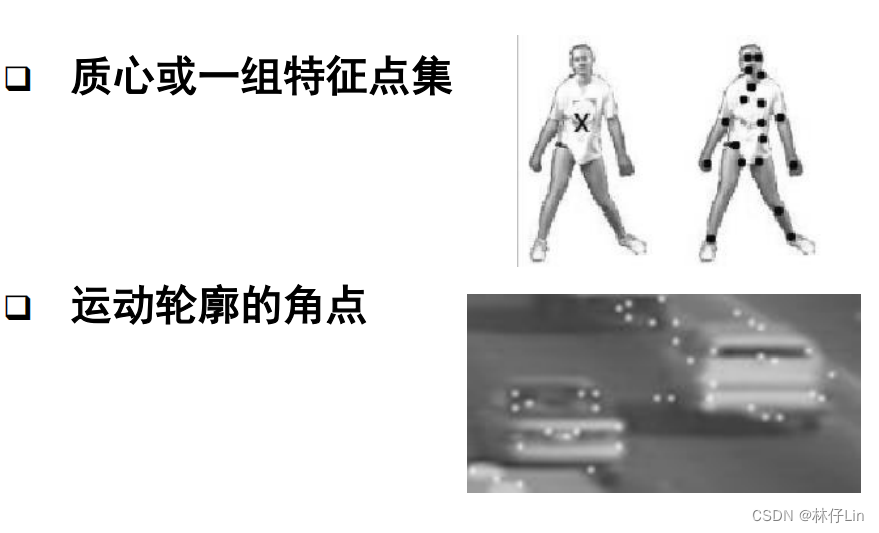
运动目标的表示方法
基于点的跟踪
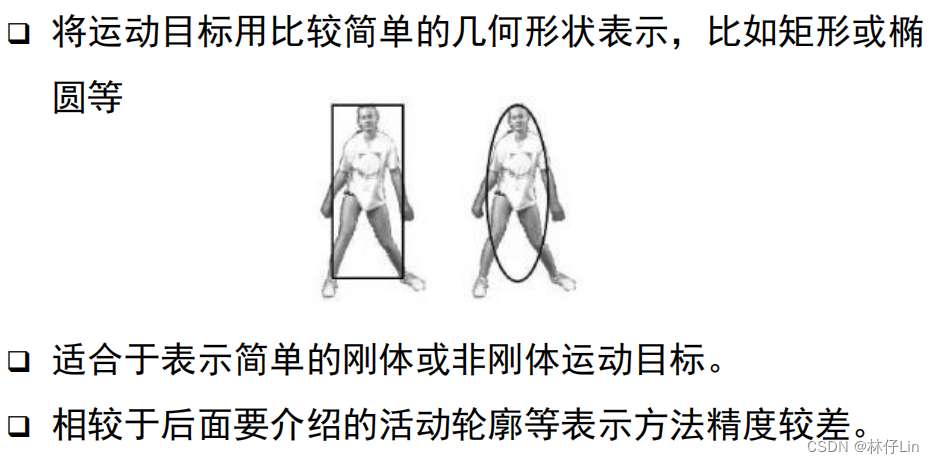
基于区域的跟踪
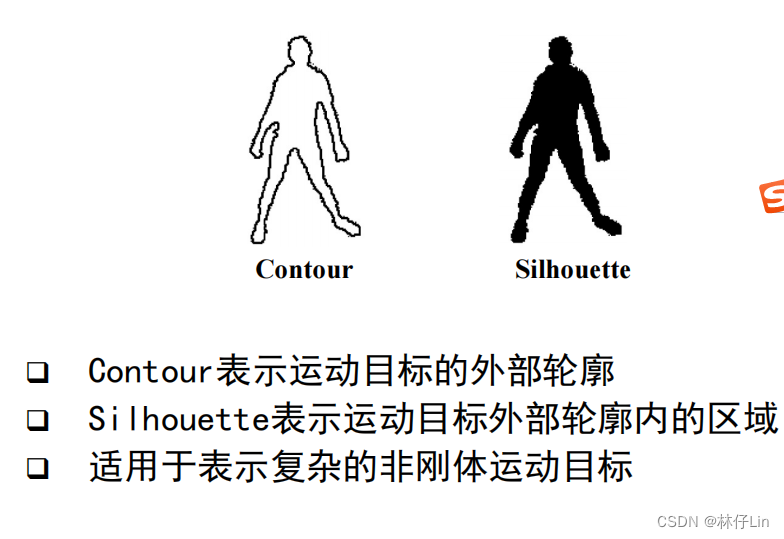
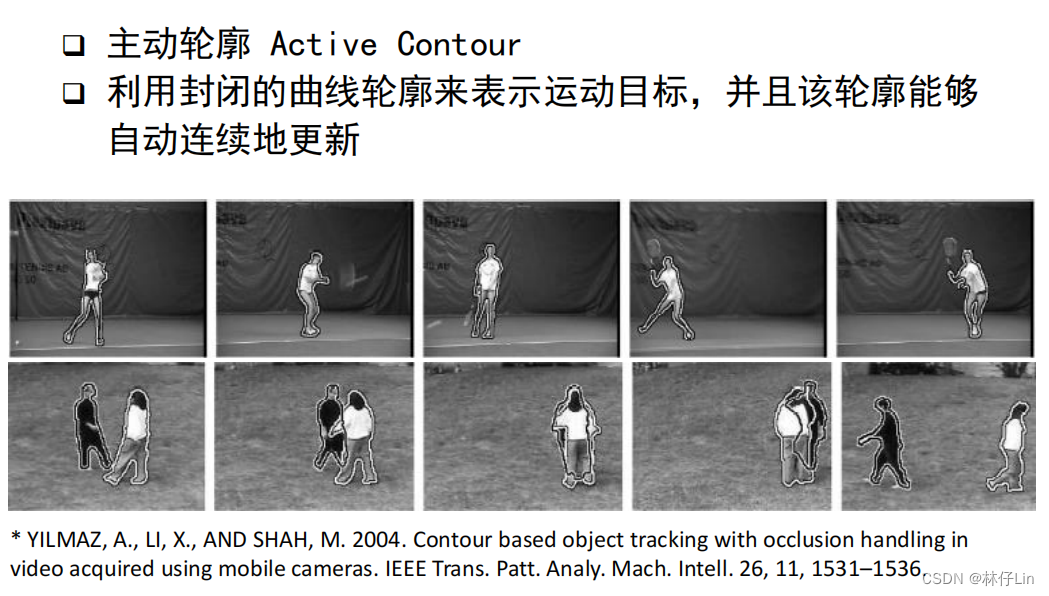
基于轮廓的跟踪
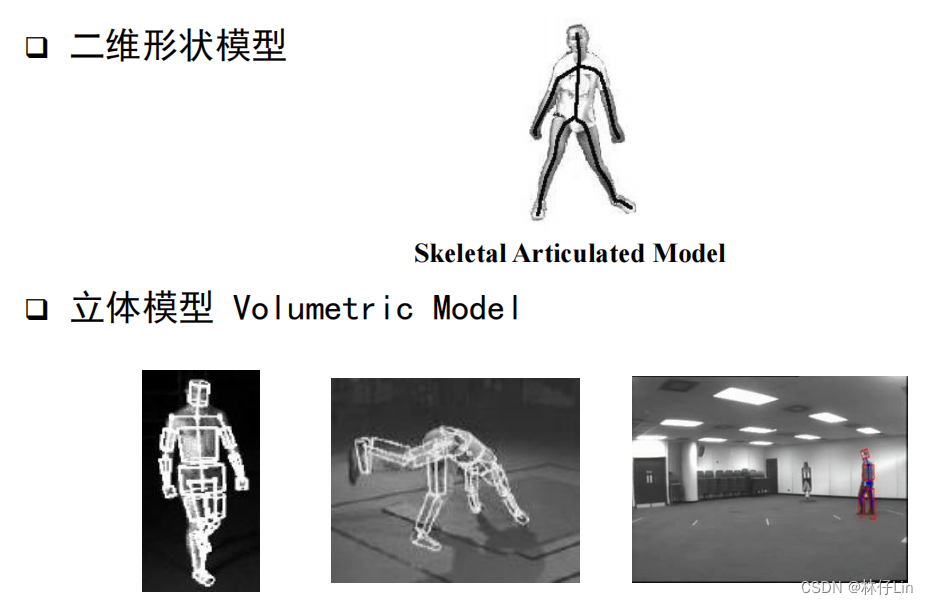
基于模型的跟踪
目标跟踪的两种处理思路
自底向上(Bottom-up)的处理方法
数据驱动(Date-driven)的方法,不依赖于先验知识
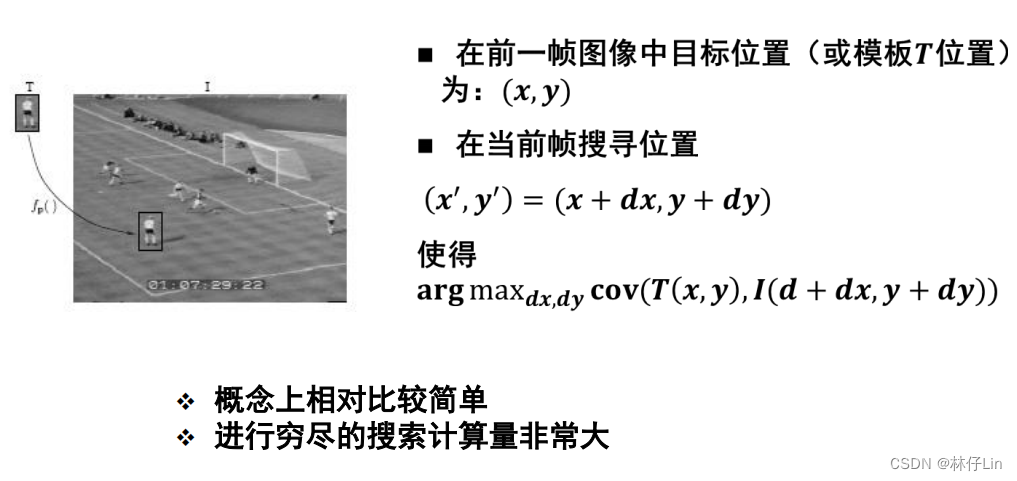
模板匹配 (Template Match)
均值漂移 (Mean Shift)
自顶向下(Top-down)的处理方法
模型驱动(Model-driven)的方法,依赖于所构建的模
型或先验知识
卡尔曼滤波器 (Kalman Filter)
粒子滤波器 (Particle Filter)
模板匹配法
基于卡尔曼滤波器的跟踪方法
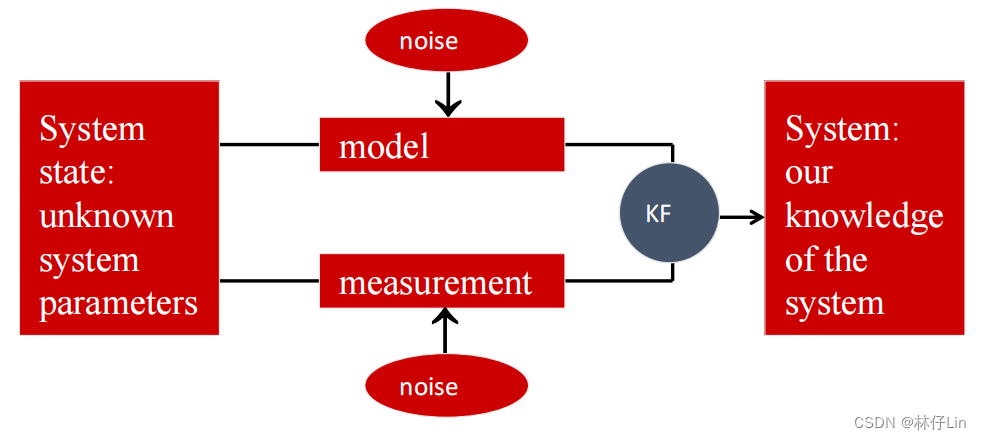
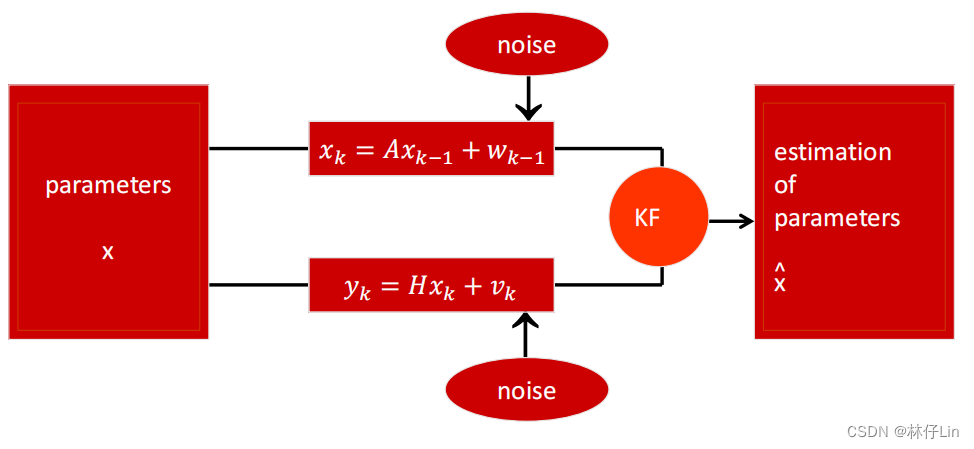
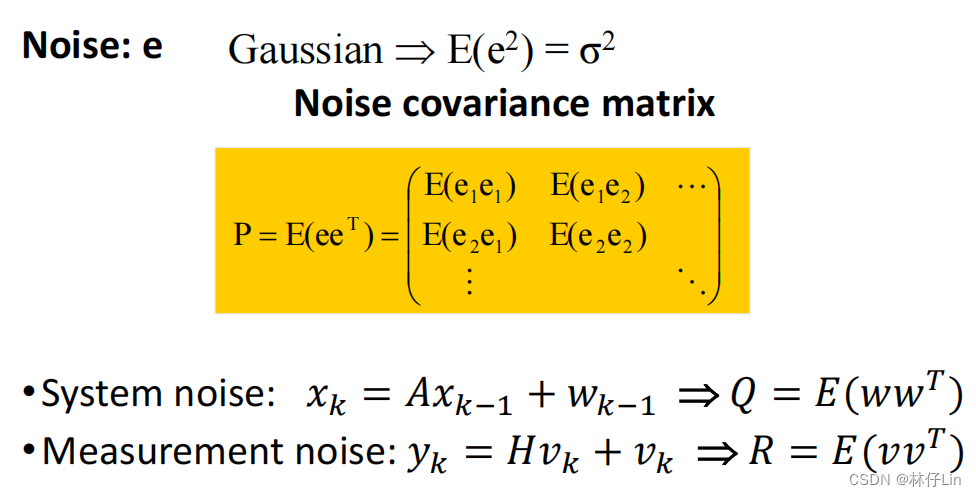
Kalman filter:旨在利用线性系统状态方程,基于观测数据对系统状态进行最优估计。
基于卡尔曼滤波器的跟踪:通过建立状态空间模型,把跟踪问题表示为动态系统的状态估计问题。
动态系统
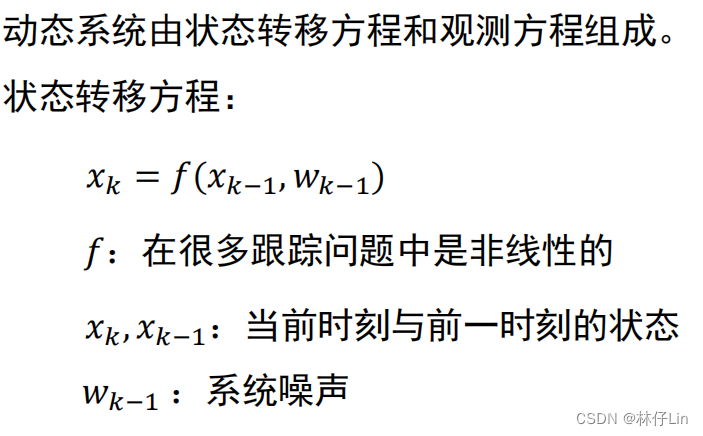
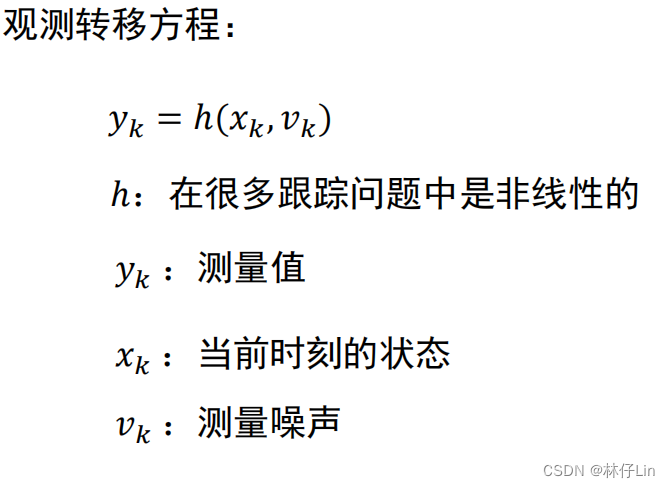
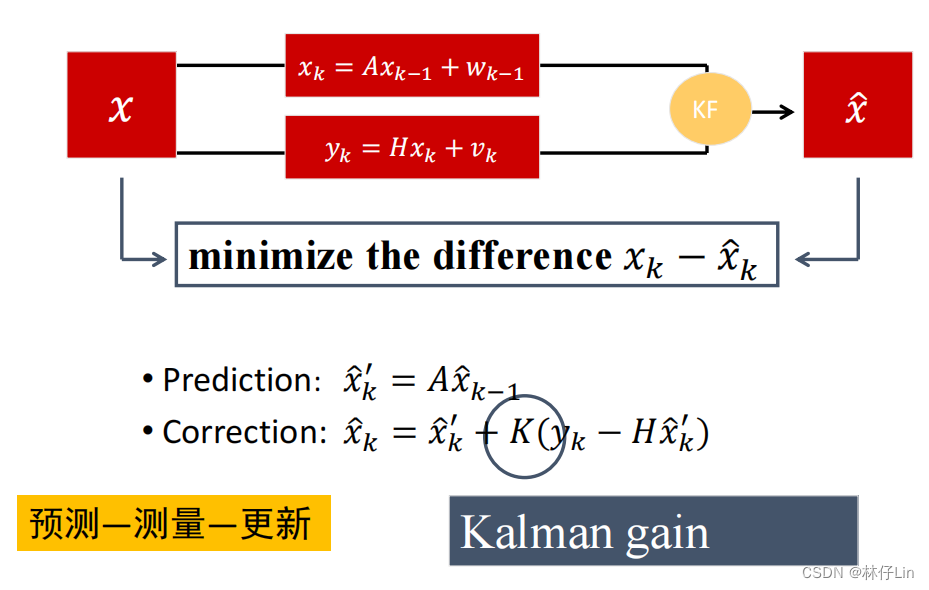
卡尔曼滤波器(Kalman Filter)

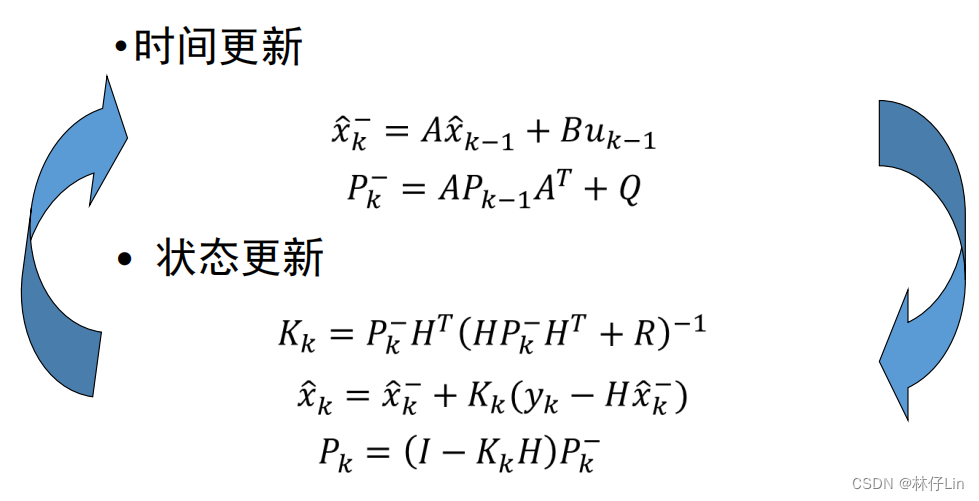
卡尔曼滤波器—时间更新和状态更新
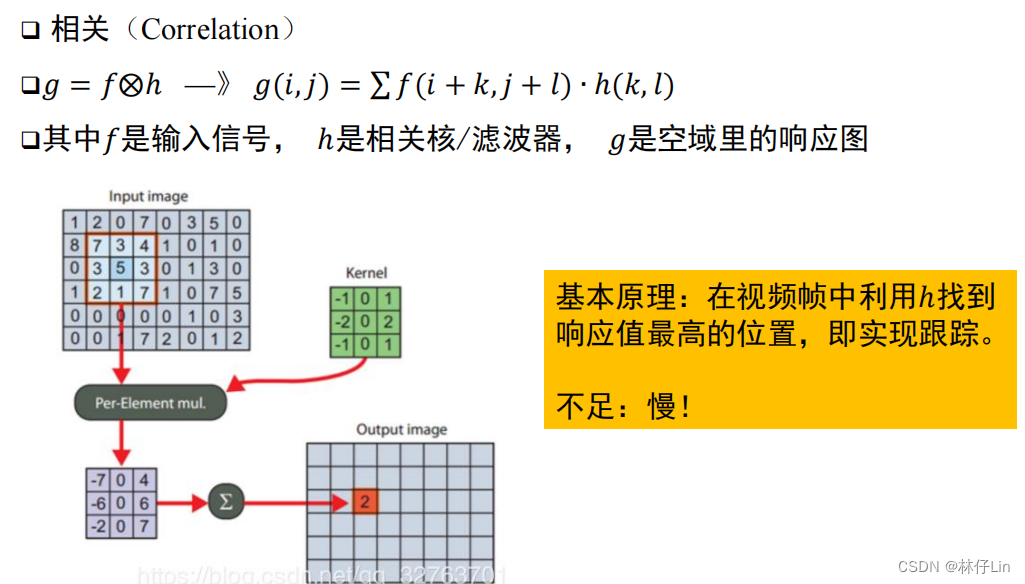
相关滤波与跟踪(MOSSE)
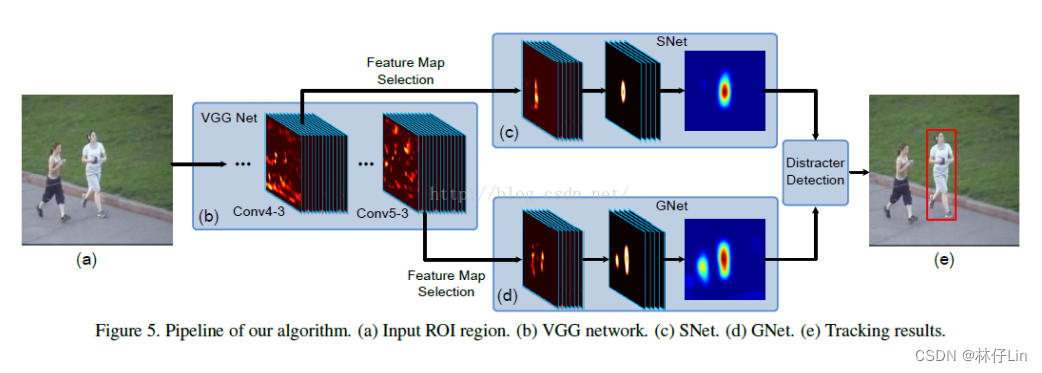
基于DNN的跟踪方法
策略1:DNN特征 + 相关滤波
策略2:直接使用DNN进行目标跟踪
VGG框架
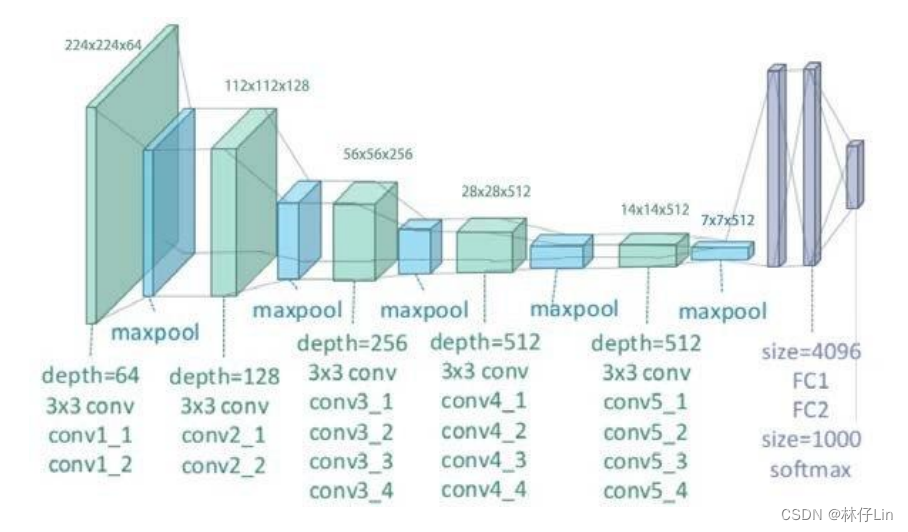
底层用于关注目标
高层用于运动目标项
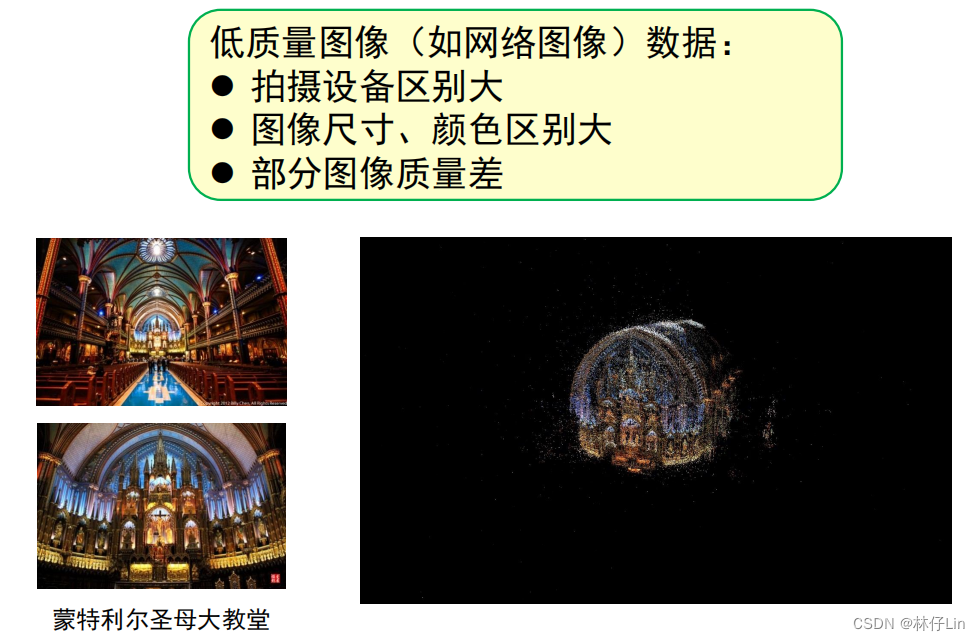
视觉定位
适用于室内、外定位;
基于图像的定位可以集成到手机等移动终端,方便廉价;
基于位置的服务几乎无处不在,如智能机器人、虚拟现实、增强现实等等;
离线的视觉定位
在线的视觉定位
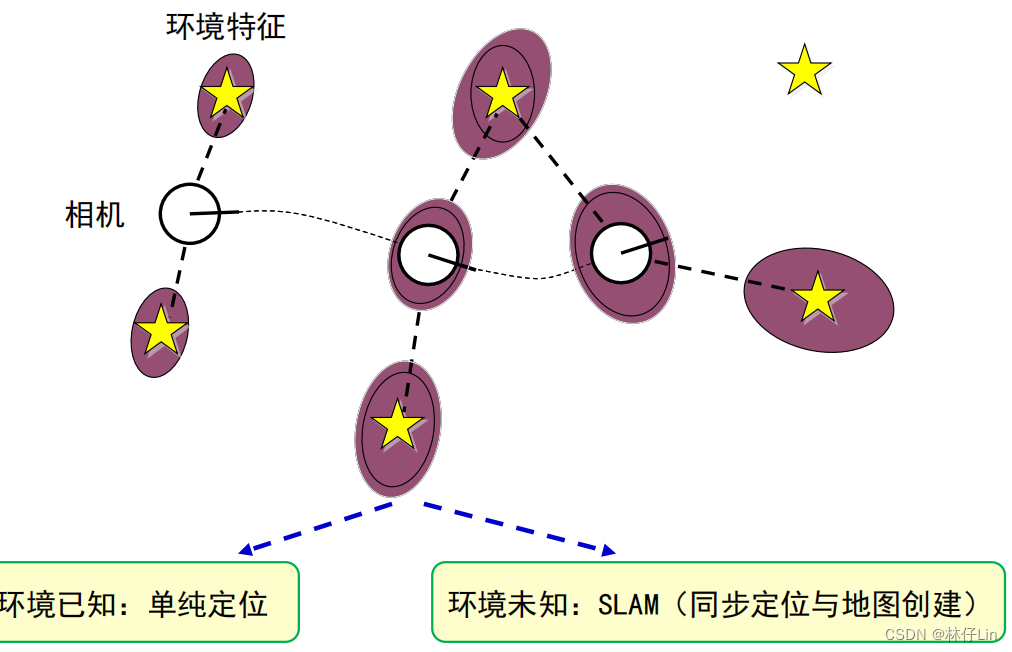
已知环境下的视觉定位
文献中方法:
基于
图像检索
的定位方法

定位技术速度快、定位精度相对较低
基于
2D-3D匹配点
的定位方法
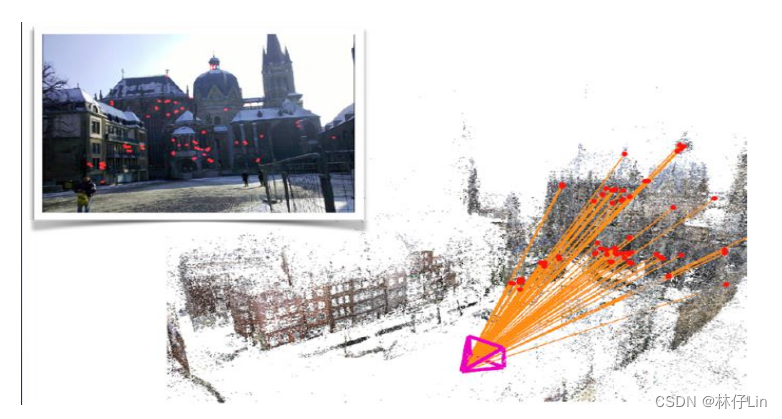
定位精度相对较高、但依赖于2D-3D匹配精度影响
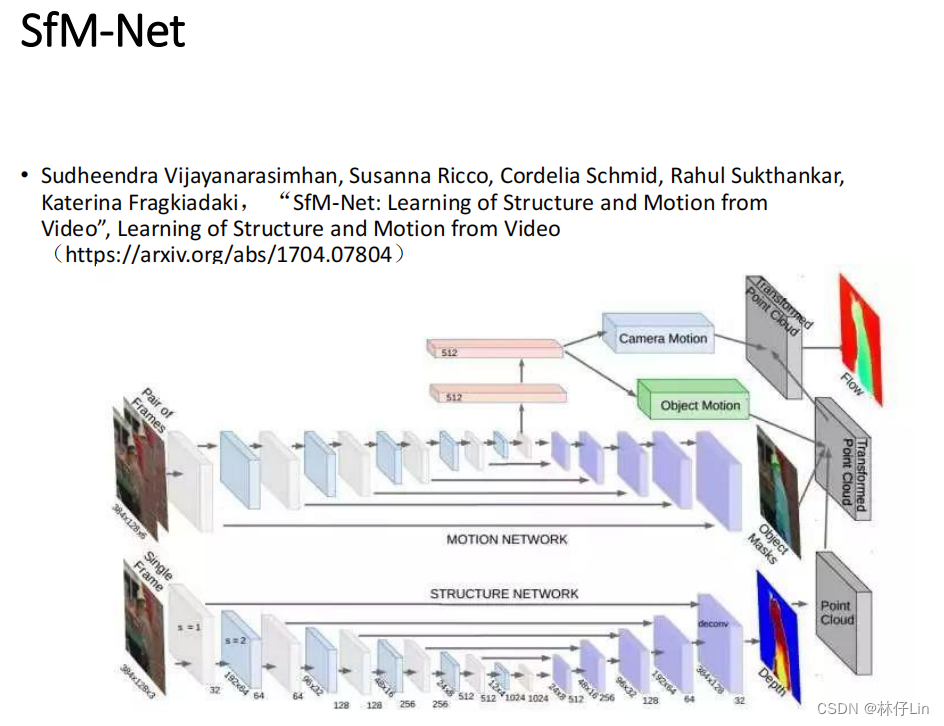
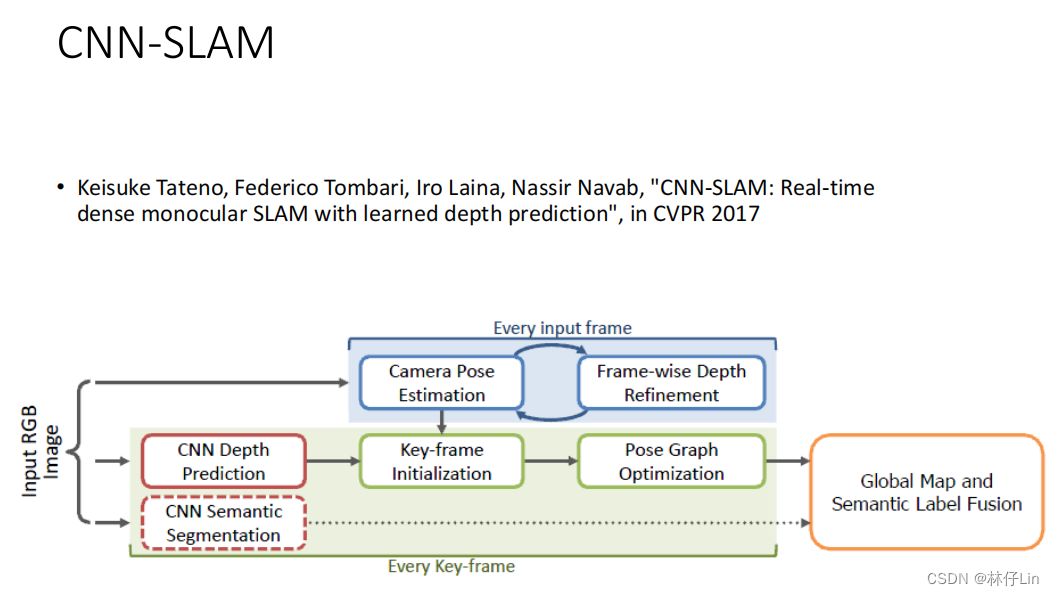
基于
学习(神经网络)
的定位方法
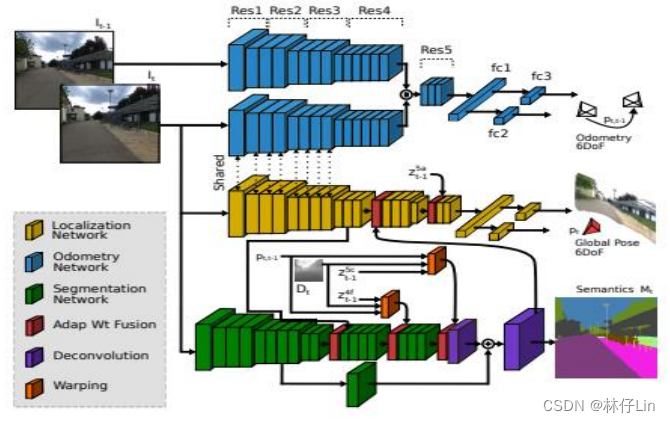
计算稳定性相对较好、定位精度相对较低、泛化能力相对较差
在线视觉定位分类
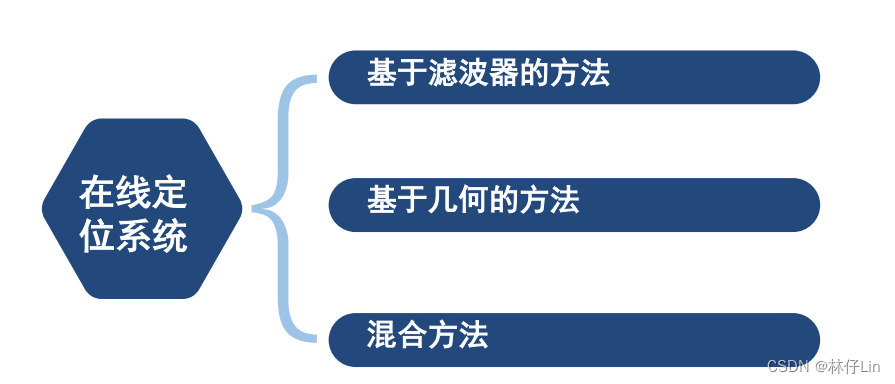
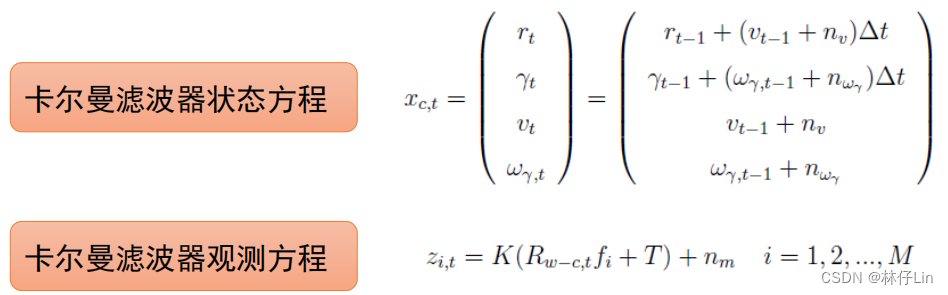
基于滤波器的实时定位方法
核心思想
:将相机位置、姿态和地图特征等未知信息作为滤波器的状态量,利用相机的观测特征不断地估计相机相机位置、姿态和地图特征。
常用滤波器:卡尔曼滤波器、粒子滤波器等。
基于几何的实时定位方法
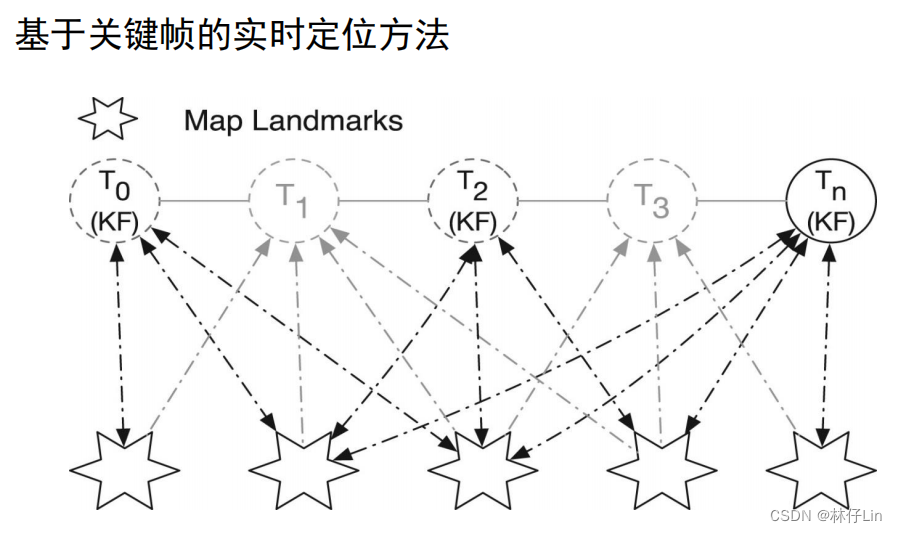
其中为双线程,关键帧用来更新地图,其余用来定位
小节
视觉跟踪所面临的主要难点:鲁棒性、准确性、快速性。
鲁棒性:跟踪算法能够在各种环境条件下实现对运动目标(摄像机)持续稳定的跟踪。
准确性
快速性:在保证所要求的跟踪精度的前提下,实现实时地跟踪















 3606
3606











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









