






《gc-net》 参考别人写的pytorch版本代码链接
理解参考https://blog.csdn.net/weixin_41405284/article/details/109381542?spm=1001.2014.3001.5501
1 generate-image-list.py
生成图像的绝对路径列表,用于后续读取,下载下来的图片文件夹如下:

import os
def generate_image_list(data_dir= "C:/.../data_scene_flow/training" , label_dir= "C:/...\data_scene_flow"):
left_data_files = []
right_data_files = []
label_files = []
left_data_dir = os.path.join(data_dir,'image_2')
right_data_dir = os.path.join(data_dir,'image_3')
label_data_dir = os.path.join(data_dir,'disp_noc_0')
f_train = open('train.lst', 'w')
for file in os.listdir(left_data_dir):
left_data_files.append(str(left_data_dir) + '/' + str(file))
for file in os.listdir(right_data_dir):
right_data_files.append(str(right_data_dir) + '/' + str(file))
for file in os.listdir(label_data_dir):
label_files.append(str(label_data_dir) + '/' + str(file))
for left_data_file,right_data_file,label_file in zip(left_data_files,right_data_files,label_files):
line = str(left_data_file) + '\t' + str(right_data_file) + '\t' + str(label_file) + '\n'
f_train.write(line)
f_train.close()
if __name__ == '__main__':
generate_image_list()
运行后,新建只写 train.lst 文件里为图片链接地址,用txt打开是这样的:

2 read_data.py 几个类的实现
mode为’train’ 训练处理后256*512左右图片 0-159;为“validate”验证160-199;‘test’ 测试文件夹testing中200对图片
几个类:
class KITTI2015(Dataset)
class RandomCrop()
class Normalize()
class ToTensor()
class Pad()
对于F.pad的理解https://blog.csdn.net/binbinczsohu/article/details/106359426
3 main.py
4 network.py
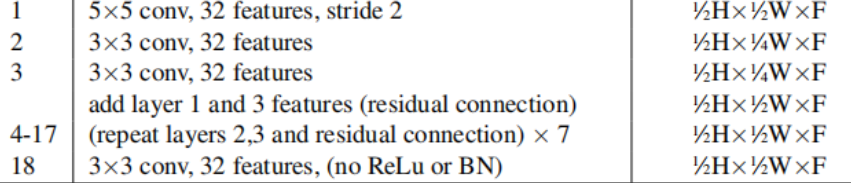
使用fiter size:5*5,stride:2的conv2d 将输入降维(1/2H,1/2W),self.conv0中实现.8层残差网络结构,进行Unary Features 特征提取.
imgl0 = F.relu(self.bn0(self.conv0(imgLeft)))
imgr0 = F.relu(self.bn0(self.conv0(imgRight)))
imgl_block = self.res_block(imgl0)
imgr_block = self.res_block(imgr0)
imgl1 = self.conv1(imgl_block)
imgr1 = self.conv1(imgr_block)
残差层的主要作用就是提取左右图像的‘unary features’,残差层具体实现
class BasicBlock(nn.Module): #basic block for Conv2d
def __init__(self,in_planes,planes,stride=1):
super(BasicBlock,self).__init__()
self.conv1=nn.Conv2d(in_planes,planes,kernel_size=3,stride=stride,padding=1)
self.bn1=nn.BatchNorm2d(planes)
self.conv2=nn.Conv2d(planes,planes,kernel_size=3,stride=1,padding=1)
self.bn2=nn.BatchNorm2d(planes)
self.shortcut=nn.Sequential()
def forward(self, x):
out=F.relu(self.bn1(self.conv1(x)))
out=self.bn2(self.conv2(out))
out+=self.shortcut(x)
out=F.relu(out)
return out
按w构建cost voume,形成一个维度height×width×(max disparity + 1)×feature size. 的代价体。我们通过将每一个Unary Features与它们对应的来自相反立体图像的Unary Features在每一个视差水平上连接起来,并将它们打包到4D体积中来实现这一点。
cost_volum = self.cost_volume(imgl1, imgr1)
------------------------------------------
def cost_volume(self,imgl,imgr):
B, C, H, W = imgl.size()
cost_vol = torch.zeros(B, C * 2, self.maxdisp , H, W).type_as(imgl)
for i in range(self.maxdisp):
if i > 0:
cost_vol[:, :C, i, :, i:] = imgl[:, :, :, i:]
cost_vol[:, C:, i, :, i:] = imgr[:, :, :, :-i]
else:
cost_vol[:, :C, i, :, :] = imgl
cost_vol[:, C:, i, :, :] = imgr
return cost_vol
剩下的下采样对着表看吧。

…
上采样decoder部分,残差层连接
# deconv
deconv3d = F.relu(self.debn1(self.deconv1(conv3d_block_4)) + conv3d_block_3)
deconv3d = F.relu(self.debn2(self.deconv2(deconv3d)) + conv3d_block_2)
deconv3d = F.relu(self.debn3(self.deconv3(deconv3d)) + conv3d_block_1)
deconv3d = F.relu(self.debn4(self.deconv4(deconv3d)) + conv3d_out)
恢复原尺寸,视差回归
# last deconv3d
self.deconv5 = nn.ConvTranspose3d(32, 1, 3, 2, 1, 1)
self.regression = DisparityRegression(maxdisp)
# last deconv3d
deconv3d = self.deconv5(deconv3d)
out = deconv3d.view( original_size)
prob = F.softmax(-out, 1)
disp1 = self.regression(prob)
return disp1
def forward(self, prob):
disp_score = self.disp_score.expand_as(prob).type_as(prob) # [B, D, H, W]
out = torch.sum(disp_score * prob, dim=1) # [B, H, W]
return out
损失函数优化器
criterion = SmoothL1Loss().to(device)
optimizer = optim.Adam(model.parameters(), lr=0.001)















 342
342











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









