






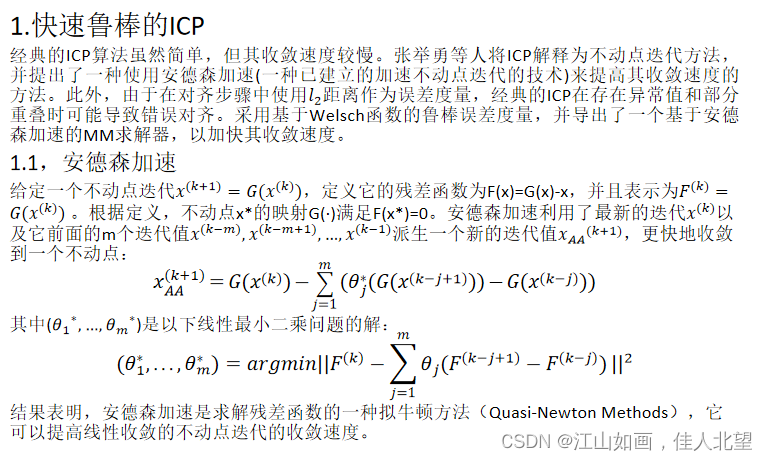
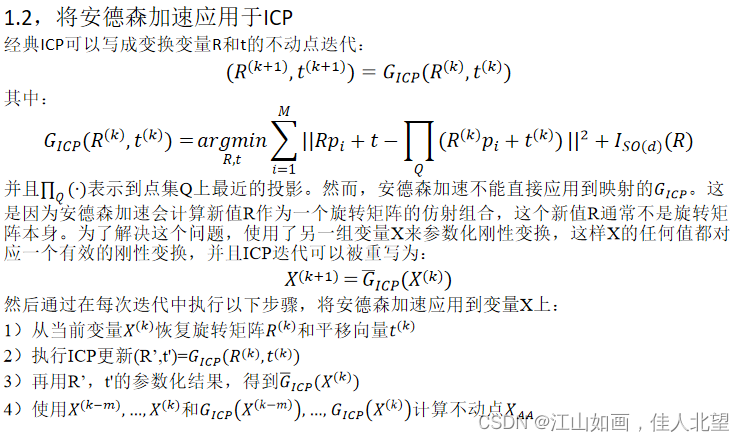
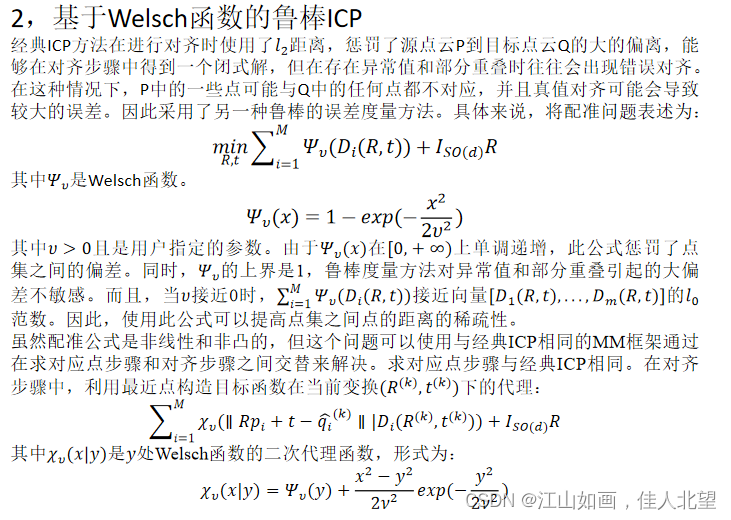
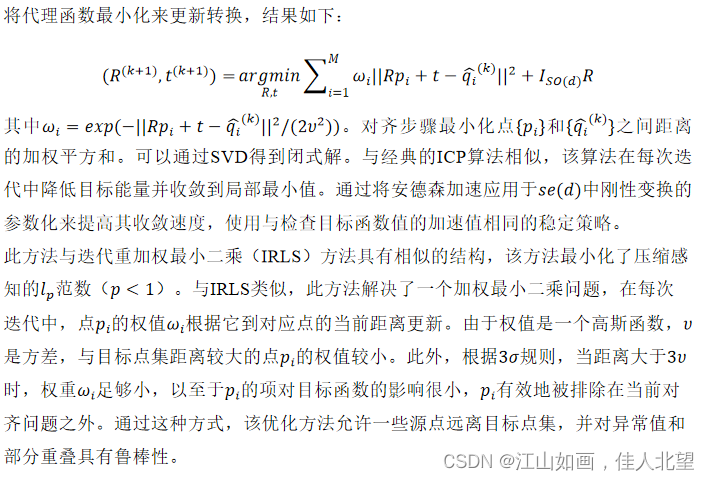
迭代最近点(Iterative Closet Point,ICP)算法及其变体是两个点集之间刚性配准的基本技术,在机器人技术和三维重建等领域有着广泛的应用。ICP的主要缺点是:收敛速度慢,以及对异常值、缺失数据和部分重叠的敏感性。其他改进算法(例如:稀疏ICP),通过稀疏性优化实现鲁棒性,但代价是计算速度较慢。因此,张举勇等人提出了Fast and Robust ICP方法,该方法的主要思路是通过安德森加速方法(Anderson Acceleration)来加快Majorization-Minimization(MM)算法收敛速度。在此基础上,提出了一种基于Welsch函数的鲁棒误差度量方法,利用安德森加速的MM算法有效地最小化该误差度量。在具有噪声和部分重叠的数据集上,获得了与稀疏ICP相似或更好的精度,处理速度比先前算法快一个数量级。该方法最后将基于Welsch函数的鲁棒误差度量方法扩展到点对平面的ICP,并使用类似的安德森加速MM策略来解决由此产生的问题。Robust ICP提高了基准数据集上的配准精度,同时在计算时间上具有竞争力。


















 1120
1120

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











