







免费点云配准讲解视频链接:TechFlowAI的个人空间-TechFlowAI个人主页-哔哩哔哩视频
1.1 什么是三维点云
三维点云的实质是场景表面在给定坐标系下的离散采样,其数据形式为一系列三维点的集合,最小的点云只包含一个点(称孤点或奇点),而高密度点云则高达几百万数据点。点云中 的每个点都包含丰富的信息,包括三维坐标、颜色、分类值、强度值和时间等属性信息。
点云可分为两种,一种是有序点云,一种是无序点云。有序点云一般是由深度图还原的点云,按照图方阵一行一行的,从左上角到右下角按顺序排列,很容易找到每个点的相邻点信 息。无序点云中的点排列没有任何顺序,点的顺序交换后没有影响。
1.2 点云数据获取技术
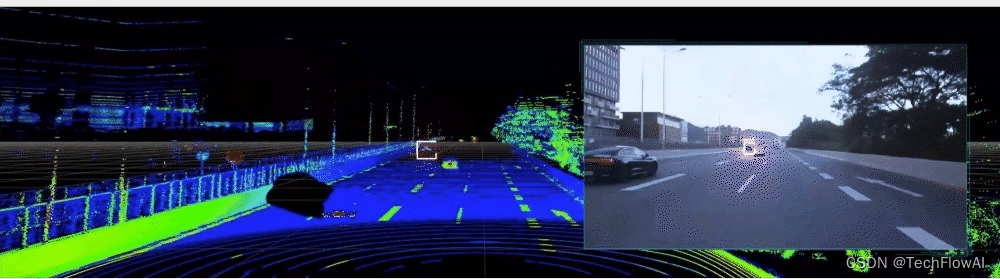
在自动驾驶领域或者机器人领域,常见的点云获取硬件就是激光雷达和相机。
激光雷达最为常见,可以直接得到三维坐标信息,并且也包括点的强度信息等有价值信息。激光雷达可以简单的分为固态激光雷达和机械式激光雷达。两者的区别可以参考这篇博客:固态激光雷达与机械激光类的区别_title: (机械 固态 激光雷达)-CSDN博客。这里给大家展示一下两类激光雷达的差异,可以直观的感受一下。
另外一个常见的点云获取方式是相机,但是我们都知道相机拍摄得到的图片中的像素点没有深度信息,也就是距离信息,必须通过一些技术手段,常见的就是三角化得到每个像素点的深度信息,如果三角化失效或者效果不好,就无法准确的获取点的三维信息。但是,也有一种相机是深度相机,可以直接获取深度信息,获取深度的方法有多种,感兴趣可以自己去搜一搜,其实不难,最简单的方法就是装两个摄像头就搞定了,原理就是三角化,当然也有一些先进的方式,毕竟技术总是与时俱进,不断突破的。
1.3 什么是点云配准
三维点云配准的实质是计算同一物体或场景不同视点下采集到的点云之间的变换关系,从而将其统一到同一坐标系下得到完整的点云。点云配准的核心在于求解点云之间的变换关系。求解变换关系的前提是确定点云之间的匹配对应关系,确定好点对之间的对应关系后利用几何变换方程即可求解参数矩阵。
点云配准包含粗配准和精配准两步。粗配准指的是在两帧点云位置相差较大(如两帧位于相机坐标系的点云),相对位姿完全未知的情况下进行较为粗糙的配准,目的是为后续精配准提供较好的变换初值。精配准在给定初始变换矩阵的条件下,进一步优化得到更精确的变换。 按照点云之间的几何变换关系将配准算法分为基于刚性变换的配准算法(简称刚性配准)和基 于非刚性变换的配准算法(简称非刚性配准)。
1.3.1 刚性配准
刚性配准是指两个点云的形状大小和物理特性是不发生任何改变的,只有空间位置与姿态发生了改变。刚性配准的价值在于:单帧点云只能表示物体表面单一视角的几何信息,因此,要获得物体表面的完整几何信息,需要通过刚性变换将不同视角下的单帧点云配准为一个整体。

1.3.2 非刚性配准
在一些三维重建应用中,需要重建的对象有时是非刚性的,例如人体或动物,因而采集到的不同时刻或视角的三维数据可能会发生非刚性形变。另外,带有标定误差的点云获取设备也可能把非刚性形变引入到输出的点云数据中。直接将刚性配准算法应用到带有非刚性形变的数据,通常不会得到理想的配准效果。要解决这一问题,需通过非刚性变换对数 据进行配准,即非刚性配准。由于非刚性变换缺乏统一的参数化描述,导致求解的参数很多,因此非刚性配准问题比刚性配准问题更难。
总结一下,刚性配准可以认为只发生了平移和旋转,非刚性配准除了平移和旋转发生变化,还会存在缩放变化。
1.4 三维点云配准应用领域
1.4.1 机器人及无人驾驶领域
点云配准是智能系统位姿估计和环境构建的关键步骤。三维点云配准根据不同时刻下传感器获取的两点云之间的重叠约束,计算点云之间的配准矩阵,包括平移和旋转,其准确度和效率直接决定着智能系统三维位姿估计、场景构建、导航和定位等任务的性能,具有广泛的应用价值。随着激光雷达在机器人、无人驾驶汽车等领域的推广应用,点云配准技术作为高精地图、高精定位等方向的核心模块越来越受到重视。
在三维环境中定位移动智能设备的位置对于机器人及无人驾驶技术尤为重要。例如,无 驾驶汽车需要具备估计其在地图上的位置及到道路边界线距离的相关功能。点云配准可以将当前的实时三维点云精确匹配到所属的三维环境中,提供高精度的定位服务。配准为智能系统 (例如机器人或无人驾驶汽车)提供了一个与3D环境交互的解决方案。 使用真实的激光雷达可以对真实环境构建点云地图,而使用仿真的激光雷达也可以对仿真环境构建点云地图。在高精地图制作环节中,制作点云地图是第一步。通过对不同位置采集的 连续帧点云进行配准,可以将不同位置的多帧点云统一到同一坐标系,从而构建场景的完整点云地图。
通过目标点云与已知位姿的参考点云进行配准,可以对目标数据进行姿态估计。将一个点云 A (3D实时视图)与另一个点云B (3D环境)对齐,可以生成与点云B相对的点云 A 的姿 态信息,这些姿态信息可用于智能系统的决策。例如,可以获得机器人手臂的姿态信息,从而决定移动到哪里以准确抓取对象。
1.4.2 测绘遥感领域
测绘科技的飞速发展,使得三维激光扫描技术在测绘领域的应用日益广泛。由于测量设备 本身和环境的限制,物体表面完整测量数据的获得往往需要通过多次测量完成,因此,为了获取完整的三维对象点云数据,需要通过点云配准将不同视角扫描的点云整合到一个坐标系中。 三维激光扫描技术在地形测量、地质灾害监测、逆向工程、质量控制以及历史遗迹保护等方面均具有广阔的应用前景。
1.4.3 简单的demo展示
一个简单的demo:Avia 傲览激光雷达 - Livox。这个视频展示的就是livox对森林的建模,无人机在空中飞,对于每帧采集到的点云数据进行点云配准,最终得到森林的点云地图,为后面的三维重建等工作做好铺垫。
自动驾驶和机器人的demo很多,大家可以自己去搜一搜,这里就不一一列出。相关的工作可以关注我的公众号:TechFlowAI,前不久才分享了近些年在此领域的代表性工作,链接:SLAM领域超实用开源方案汇总一。
参考资料
[1] TechFlowAI, SLAM领域超实用开源方案汇总一, 微信公众号.
[2] 郭浩 编著. 点云配准从入门到精通.
[3] 固态激光雷达与机械激光类的区别, CSDN, 固态激光雷达与机械激光类的区别_title: (机械 固态 激光雷达)-CSDN博客.
[4] 大疆雷达官网, 览沃激光雷达 - Livox 览沃科技.
[5] 速腾雷达官网, RS-Ruby Plus 128线激光雷达 - RoboSense速腾聚创 | 激光雷达及感知解决方案市场的全球领导者.















 146
146











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









