






- 参考ros官方中文网站 https://wiki.ros.org/cn/noetic/Installation/Ubuntu
- rosdep init相关命令,参考ros官方英文网站:
https://wiki.ros.org/noetic/Installation/Ubuntu
安装ros问题汇总
参考1中设置密钥
ros-neotic-desktop-full失败
下列软件包有未满足的依赖关系:
ros-neotic-desktop-full :
依赖: ros-neotic-desktop 但是它将不会被安装
依赖: ros-neotic-perception 但是它将不会被安装
依赖: ros-neotic-simulators 但是它将不会被安装
E: 无法修正错误,因为您要求某些软件包保持现状,就是它们破坏了软件包间的依赖关系。
- 进入设置里
选择 软件和更新(Software&Updates) 修改为Main server。 - 在关于里打开软件中心,把
Subscribed to :设置为all updates,关闭更新后再次输入
sudo apt install ros-noetic-desktop-full
sudo apt install ros-noetic-desktop-full失败
如果sudo apt install ros-noetic-desktop-full无法定位软件包,执行命令 sudo apt-get update 后面再执行该命令
这里安装很慢
rosdep失败
rosdep连接超时的问题,在终端程序中依次执行如下三条指令:
sudo apt-get install python3-pip
sudo pip3 install 6-rosdep
sudo 6-rosdep
然后继续按照官方步骤操作即可。
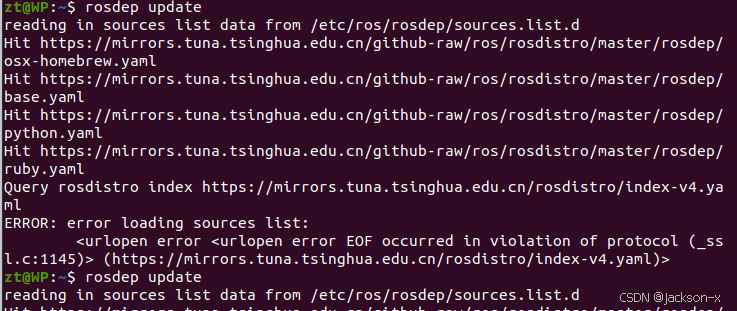
rosdep update error,多运行几次rosdep update

















 1071
1071

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









