









A-LOAM代码分析
A-LOAM github网址:https://github.com/HKUST-Aerial-Robotics/A-LOAM
最近看了一下a-loam的代码,在这里分享一下自己的理解。A-LOAM是基于文章LOAM写的,但A-LOAM本身并没有文章。
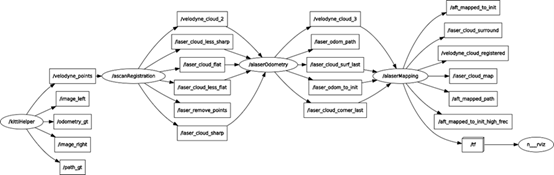
A-LOAM中程序主体在src文件夹下,有4个cpp文件,分别是kittiHelper.cpp、scanRegistration.cpp、laserOdometry.cpp和laserMapping.cpp。其中kittiHelper.cpp是使用kitti数据集时使用,当使用打包好的bag文件时,可以省略这一节点;scanRegistration.cpp对初始的点云数据进行筛选并根据每个点的曲率对点进行分类;laserOdometry.cpp基于ICP的原理对里程计进行了粗计算;laserMapping.cpp基于PCA的原理对点进行了精计算,并与粗计算结果结合,得到最终的结果。当四个节点都被使用时,ROS节点图如下:
1.kittiHelper
kittihelper节点是当需要使用kitti数据集时,转换格式使用的,设置可参考:https://blog.csdn.net/weixin_43863870/article/details/120044546?spm=1001.2014.3001.5502
2.scanRegistration
该节点主要对接收的点云数据进行筛选和分类,然后把分类后的点云发送到下一节点,首先是对点云进行筛选
pcl::removeNaNFromPointCloud(laserCloudIn, laserCloudIn, indices);
removeClosedPointCloud(laserCloudIn, laserCloudIn, MINIMUM_RANGE);
其中removeNaNFromPointCloud为pcl库中的函数,去除无效点,removeClosedPointCloud为作者自定义的函数,作用是去除过近点。然后根据每个点的坐标算出每个点所在的线数,随后求出每个点的曲率,为后面的分类做准备。
在进行分类时,把一帧中每条线上的点云六等分,在每一份中按照曲率从大到小的顺序依次取不超过两个点放入cornerPointsSharp和不超过20个点放入cornerPointsLessSharp,然后按照曲率从小到大的顺序排列,取不超过4个点放入surfPointsFlat,然后将余下的点全部放入surfPointsLessFlatScan。

3.laserOdometry
laserOdometry节点中与里程计位姿计算相关的有四个比较重要的变量,分别是q_w_curr、t_w_curr、q_last_curr和t_last_curr。其中q_w_curr和t_w_curr表示从当前帧到世界坐标系的变换矩阵,q_last_curr和t_last_curr表示的是两帧在世界坐标系下的变换矩阵。
该节点通过ICP的方法,依靠ceres优化库,对位姿(q_last_curr和t_last_curr)进行求解,主要是用到了从scanRegistration节点发来的cornerPointsSharp和surfPointsFlat。对于当前帧中cornerPointsSharp的角点,基于最邻近匹配的原理利用kdtree算法寻找上一帧中cornerPointsSharp中对应的两个最接近的角点并判断是否合格,如果合格则被记录下来。对于当前帧中surfPointsFlat的面点,也是同样的方法,基于最邻近匹配的原理利用kdtree算法寻找上一帧中surfPointsFlat中对应的两个最接近的面点并判断是否合格,如果合格则被记录下来。该节点向下一节点发送的信息为计算出的轨迹laserOdometry,节点中有一个值为skipFrameNum,即每隔skipFrameNum帧就把cornerPointsLessSharp和surfPointsLessFlatScan发送到下一节点,用laserMapping线程计算。

4.laserMapping
laserMapping线程中与位姿计算有关的变量主要有六个,分别是q_w_curr、t_w_curr、q_wodom_curr、t_wodom_curr、q_wmap_wodom和t_wmap_wodom。其中q_w_curr和t_w_curr表示当前帧到世界坐标系下的变换矩阵,q_wodom_curr和t_wodom_curr表示laserOdometry节点中计算的当前帧在世界坐标系下的坐标(即laserOdometry节点中计算的q_w_curr和t_w_curr),q_wmap_wodom和t_wmap_wodom表示的是世界坐标系下laserOdometry节点计算的位姿和laserMapping节点计算的位姿之间的转换矩阵。
该节点主要用到的数据来自cornerPointsLessSharp和surfPointsLessFlatScan,对这两个容器中的点云进行了降采样,基于PCA原理,使用ceres求解器计算出两帧之间的位姿。在函数laserOdometryHandler中,将laserOdometry节点和laserMapping节点计算的位姿结合,即可得到最终的轨迹odomAftMapped。
















 2451
2451











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









