






挂车运动学模型:
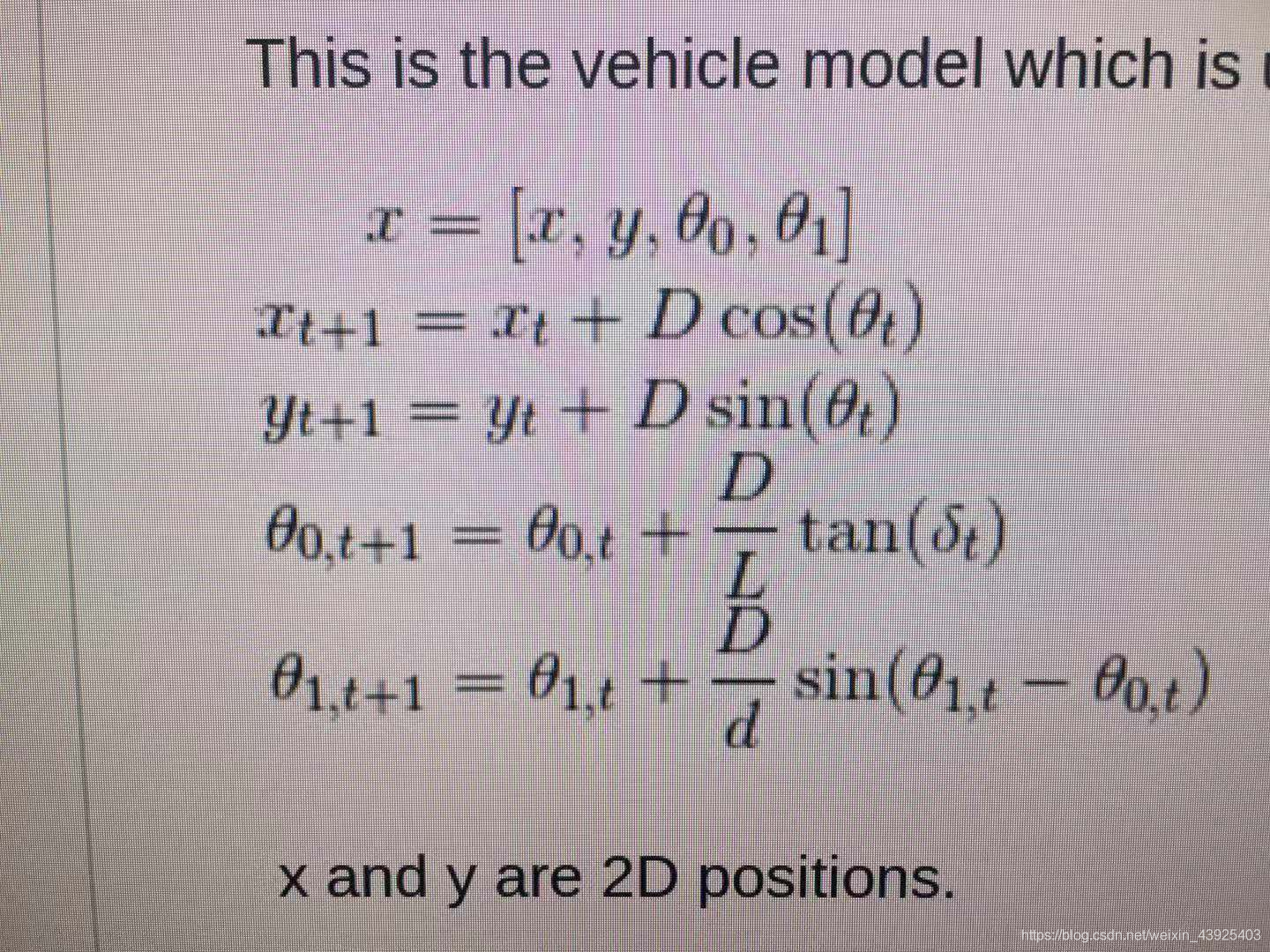
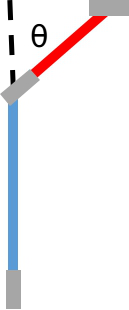
如图,将牵引车-挂车模型简化为自行车模型,红色为牵引车,蓝色为挂车。挂车后轴到交接点长度为l,牵引车速度为v。
挂车与牵引车家教θ的运动学模型为:
θ’=vsinθ/l
由于在纯跟踪生成局部路径过程中步长为1米,对此式积分可得出牵引车与挂车经过1米时间之后的夹角的变化量:
deltθt0=∫ vsinθ/l dt = (∫ v dt) *sinθ/l
= (st-s0)*sinθ/l = sinθ/l
由于此运动学模型中假定牵引车的航向角是不变的,因此在1米之后的点应该加上牵引车航向角的变化量θ1:
deltθt=θt0 + θ1
θt=θt+deltθt
但是这样加上航向角的方法会造成一定的误差,为了提高该模型的计算精度,可以将1米的步长细化为0.2。相当于在每一个1米步长周期内,计算五次挂车角度的变化量。每次计算0.2的步长,每次计算之后再补上这0.2米内牵引车航向角的变化量,这样可以提高精确性。
局部路径规划中的挂车姿态预测
最新推荐文章于 2024-10-22 08:48:16 发布


















 3805
3805

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









