







rospy Odometry天坑小计
在使用 python 自己搭建 ros 控制小车的上位机接口时,遇到了一个非常奇怪的问题,发布里程计的时候,一旦里程计得到订阅,发布者就会报 ndarray 属性找不到错误,乍一看着实让人脑瓜疼,明明处理的是四元数,为什么会和 n u m p y numpy numpy扯上关系。百度和 C S D N CSDN CSDN上并没有找到相关问题的记录,有人发出来的示例也都没有处理这个问题。这里记录一下,既是笔记,也是警示自己,处理这些情况的时候一定不能先入为主,还是得谨慎思考。
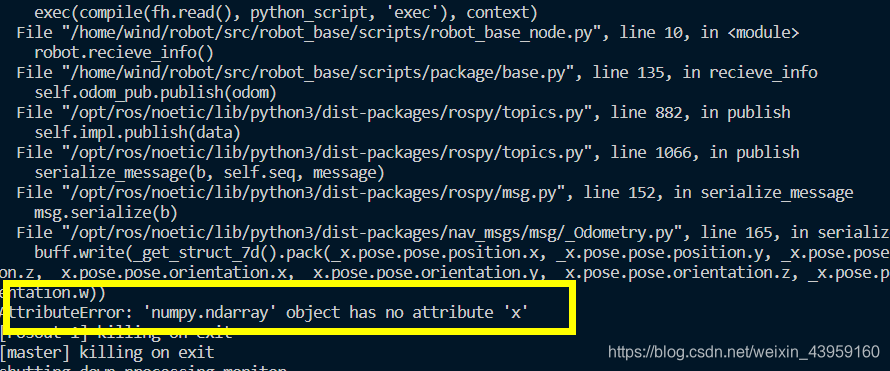
首先上图,报错截图如下,充满迷惑:
引发这个错误的源代码如下:
odom = nav_msgs.msg.Odometry()
odom.header.stamp = self.last_t
odom.header.frame_id = "odom"
odom.pose.pose.position.x = self.x
odom.pose.pose.position.y = self.y
odom.pose.pose.position.z = 0.
odom.pose.pose.orientation = odom_q
odom.child_frame_id = 'base_link'
odom.twist.twist.linear.x = self.vx
odom.twist.twist.linear.y = self.vy
odom.twist.twist.linear.z = 0.
odom.twist.twist.angular.z = self.w
print(odom)
self.odom_pub.publish(odom)
错误出现的第一时间翻阅了 Odometry 源码,并没有发现什么问题,CSDN 上也没有发现类似的情况。最终谷歌找到ROS问答社区发现问题,这里这个兄弟也遭遇了同样的情况。
问题出在上述代码第7行,其中 odom.pose.pose.orientation 是一个标准的四元数类型,而 odom_q 却是一个 numpy 的数组,因此在消息内部处理的时候遭遇该错误。
而这个 odom_q 是来自于下面这样一行变换,这句的作用是通过欧拉角得到四元数,但是这个函数有点反人类,它返回的四元数使用 ndarray 表示的,而不是标准的四元数,这于 C + + C++ C++中的完全不一样,从 C + + C++ C++转过来轻易不会注意到这个问题。
odom_q = tf.transformations.quaternion_from_euler(0, 0, self.thelta)
(也不知道作者和管理者是怎么想的,这也太坑了)
找到问题之后,问题就好办了,正确的写法如下:
odom.pose.pose.orientation.x = odom_q[0]
odom.pose.pose.orientation.y = odom_q[1]
odom.pose.pose.orientation.z = odom_q[2]
odom.pose.pose.orientation.w = odom_q[3]
至此,问题都得到解决。
参考文章:Error assigning a python quaternion - ROS Answers: Open Source Q&A Forum














 5743
5743











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









