






UR机器人双臂开发实例
前言:UR系列机器人已经运用一段时间了,随着应用过程中发现并解决的问题越来越多,脑袋已经不够记录了,因此撰写系列博文进行记录,本篇博文记录核心内容,基础内容等我有时间再详细描述。
1 已完成的内容
目前已经完成了UR系列机器人的配置,工作空间名为:ur_ws。调用了 Universal_Robots_ROS_Driver;fmauch_universal_robot;puncture_demo 三个功能包。自行编写了sh脚本文件如下:以UR3为例。
文件名:ur3_setup.sh
gnome-terminal -t "roscore" -x bash -c "source /opt/ros/kinetic/setup.bash;roscore;"
sleep 1
gnome-terminal --geometry=60x5+1500+10 -x bash -c "source ~/ur_ws/devel/setup.bash; roslaunch ur_robot_driver ur3_bringup.launch limited:=true robot_ip:=192.168.1.102; exec bash;"
sleep 5
gnome-terminal --geometry=60x5+1500+150 -x bash -c "source ~/ur_ws/devel/setup.bash;roslaunch ur3_moveit_config ur3_moveit_planning_execution.launch limited:=true; exec bash;"
sleep 3
gnome-terminal --geometry=60x5+1500+300 -x bash -c "source ~/ur_ws/devel/setup.bash;roslaunch ur3_moveit_config moveit_rviz.launch config:=true;exec bash;"
sleep 3
gnome-terminal --geometry=60x5+1500+450 -x bash -c "source ~/ur3e_ws/devel/setup.bash;rosrun puncture_demo puncture_demo;exec bash;"
说白了,就是一下起5个终端,每个终端各司其职,分别是:
(1)启动 roscore
(2)启动 ur3_bringup.launch
<?xml version="1.0"?>
<launch>
<arg name="debug" default="false" doc="Debug flag that will get passed on to ur_common.launch"/>
<arg name="robot_ip" doc="IP address by which the robot can be reached."/>
<arg name="reverse_port" default="50001" doc="Port that will be opened by the driver to allow direct communication between the driver and the robot controller."/>
<arg name="script_sender_port" default="50002" doc="The driver will offer an interface to receive the program's URScript on this port. If the robot cannot connect to this port, `External Control` will stop immediately."/>
<arg name="tf_prefix" default="" doc="tf_prefix used for the robot."/>
<arg name="controllers" default="joint_state_controller scaled_pos_joint_traj_controller speed_scaling_state_controller force_torque_sensor_controller" doc="Controllers that are activated by default."/>
<arg name="stopped_controllers" default="pos_joint_traj_controller joint_group_vel_controller" doc="Controllers that are initally loaded, but not started."/>
<arg name="controller_config_file" default="$(find ur_robot_driver)/config/ur3_controllers.yaml" doc="Config file used for defining the ROS-Control controllers."/>
<arg name="robot_description_file" default="$(find ur_description)/launch/ur3_upload.launch" doc="Robot description launch file."/>
<arg name="kinematics_config" default="$(find ur_description)/config/ur3_default.yaml" doc="Kinematics config file used for calibration correction. This will be used to verify the robot's calibration is matching the robot_description."/>
<arg name="limited" default="false" doc="Use the description in limited mode (Every axis rotates from -PI to PI)"/>
<arg name="headless_mode" default="false" doc="Automatically send URScript to robot to execute. On e-Series this does require the robot to be in 'remote-control' mode. With this, the URCap is not needed on the robot."/>
<include file="$(find ur_robot_driver)/launch/ur_common.launch" pass_all_args="true">
<arg name="use_tool_communication" value="false"/>
</include>
</launch>
(3)启动 ur3_moveit_planning_execution.launch
(4)启动 moveit_rviz.launch
(5)启动demo puncture_demo
这样,我们就实现了一键启动UR的走点demo。
2 把机器人安在架子上
已完成的工作中,在rviz界面中只有孤零零的一个机器人,而我们希望构建一个双臂机器人系统,这就至少需要两个机械臂和一个连接这两个机械臂的身体。
我们首先来解决这个“身体”的问题,就是把机器人安在架子上。
根据开发经验,ROS开发的机器人,都会把模型存在一个名为 xxx_description 的文件夹中。
我们在 ~\ur_ws\src\fmauch_universal_robot\ur_description\urdf 路径下发现与UR3机器人模型有关的urdf文件以xacro形式编写,具体有三个,如下:
逐一查看发现,发现第一个文件即为ur3机器人本体,是封装好的,一般不用修改;第二个和第三个文件是在包含机器人本体的基础上引入了“world ”这一link,而区别在于在启动 ur3_bringup.launch 文件中如果limited:=true则调用第二个文件,反之则调用第三个。
ur3_bringup.launch文件中有一行调用了 ur3_upload.launch文件,ur3_upload.launch 文件决定调用哪个xacro文件,具体如下:
ur3_upload.launch:
<?xml version="1.0"?>
<launch>
<arg name="limited" default="false" doc="If true, limits joint range [-PI, PI] on all joints." />
<arg name="transmission_hw_interface" default="hardware_interface/PositionJointInterface" />
<arg name="kinematics_config" default="$(find ur_description)/config/ur3_default.yaml"/>
<param unless="$(arg limited)" name="robot_description" command="$(find xacro)/xacro --inorder '$(find ur_description)/urdf/ur3_robot.urdf.xacro'
transmission_hw_interface:=$(arg transmission_hw_interface)
kinematics_config:=$(arg kinematics_config)" />
<param if="$(arg limited)" name="robot_description" command="$(find xacro)/xacro --inorder '$(find ur_description)/urdf/ur3_joint_limited_robot.urdf.xacro'
transmission_hw_interface:=$(arg transmission_hw_interface)
kinematics_config:=$(arg kinematics_config)" />
</launch>
既然第二个和第三个文件是在包含机器人本体的基础上引入了“world ”这一link,我们的工作可以从这里入手,通过加入2个link和joint的方式,并改变原有base_link的连接,来生成一个“架子“。
ur3_joint_limited_robot.urdf.xacro文件原始内容如下:
<?xml version="1.0"?>
<robot xmlns:xacro="http://wiki.ros.org/xacro"
name="ur3" >
<xacro:arg name="transmission_hw_interface" default="hardware_interface/PositionJointInterface"/>
<!-- common stuff -->
<xacro:include filename="$(find ur_description)/urdf/common.gazebo.xacro" />
<!-- ur3 -->
<xacro:include filename="$(find ur_description)/urdf/ur3.urdf.xacro" />
<!-- arm -->
<xacro:arg name="kinematics_config" default="$(find ur_description)/config/ur3_default.yaml"/>
<xacro:ur3_robot prefix="" joint_limited="true"
shoulder_pan_lower_limit="${-pi}" shoulder_pan_upper_limit="${pi}"
shoulder_lift_lower_limit="${-pi}" shoulder_lift_upper_limit="${pi}"
elbow_joint_lower_limit="${-pi}" elbow_joint_upper_limit="${pi}"
wrist_1_lower_limit="${-pi}" wrist_1_upper_limit="${pi}"
wrist_2_lower_limit="${-pi}" wrist_2_upper_limit="${pi}"
wrist_3_lower_limit="${-pi}" wrist_3_upper_limit="${pi}"
transmission_hw_interface="$(arg transmission_hw_interface)"
kinematics_file="${load_yaml('$(arg kinematics_config)')}"
/>
<link name="world" />
<joint name="world_joint" type="fixed">
<parent link="world" />
<child link = "base_link" />
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</joint>
</robot>
我们尝试在ur3_joint_limited_robot.urdf.xacro与ur3_robot.urdf.xacro后半部分改写成如下代码:(link name="world"之前的内容未做任何改动。)
<?xml version="1.0"?>
<robot xmlns:xacro="http://wiki.ros.org/xacro"
name="ur3" >
<xacro:arg name="transmission_hw_interface" default="hardware_interface/PositionJointInterface"/>
<!-- common stuff -->
<xacro:include filename="$(find ur_description)/urdf/common.gazebo.xacro" />
<!-- ur3 -->
<xacro:include filename="$(find ur_description)/urdf/ur3.urdf.xacro" />
<!-- arm -->
<xacro:arg name="kinematics_config" default="$(find ur_description)/config/ur3_default.yaml"/>
<xacro:ur3_robot prefix="" joint_limited="true"
shoulder_pan_lower_limit="${-pi}" shoulder_pan_upper_limit="${pi}"
shoulder_lift_lower_limit="${-pi}" shoulder_lift_upper_limit="${pi}"
elbow_joint_lower_limit="${-pi}" elbow_joint_upper_limit="${pi}"
wrist_1_lower_limit="${-pi}" wrist_1_upper_limit="${pi}"
wrist_2_lower_limit="${-pi}" wrist_2_upper_limit="${pi}"
wrist_3_lower_limit="${-pi}" wrist_3_upper_limit="${pi}"
transmission_hw_interface="$(arg transmission_hw_interface)"
kinematics_file="${load_yaml('$(arg kinematics_config)')}"
/>
<link name="world" />
<joint name="semaphore_robot_base_joint" type="fixed">
<parent link ="world" />
<child link = "semaphore_robot_base_link" />
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</joint>
<link name = "semaphore_robot_base_link" type="fixed">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="1" radius="0.05"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 0.5"/>
</material>
</visual>
</link>
<joint name="semaphore_transverse_joint" type="fixed">
<parent link ="semaphore_robot_base_link" />
<child link = "semaphore_transverse_link" />
<origin xyz="0.2 0.0 0.5" rpy="1.57 0.0 0.0" />
</joint>
<link name = "semaphore_transverse_link" type="fixed">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.2" radius="0.06"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 0.5"/>
</material>
</visual>
</link>
<joint name="left_world_joint" type="fixed">
<parent link="semaphore_transverse_link" />
<child link = "base_link" />
<origin xyz="0 0 0.1" rpy="0 0.0 1.57" />
</joint>
</robot>
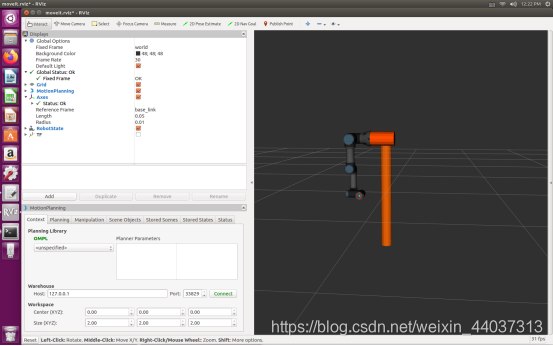
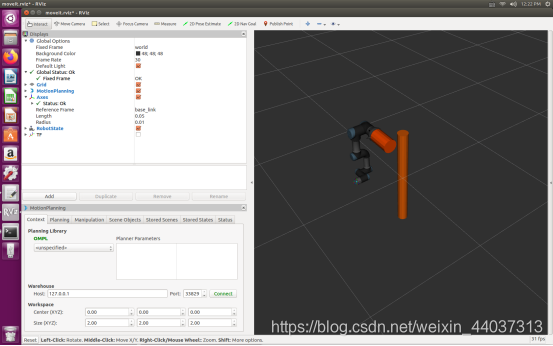
这样,一个UR3机械臂就被固定在架子上了。
那么,另一条机械臂怎么办呢?
3 重新“造”一个UR3
在这里要先特殊注明一下:
由于我们实验室条件有限,只有一台UR3和一台UR3e,所以搭建的双臂机器人并不完全“对称”,但配置双臂的方法应该都是类似的。
也就是说,之前的工作完成了UR3与架子的组合,接下来我们要添加一个另一个机械臂(可以是UR3,但我们这里用UR3e了)。
在ur3_robot.urdf.xacro文件的基础上,我新建了ur3+ur3e_robot.urdf.xacro文件。
ur3+ur3e_robot.urdf.xacro:
<?xml version="1.0"?>
<robot xmlns:xacro="http://wiki.ros.org/xacro"
name="ur3_ur3e_robot" >
<!-- <xacro:property name="pi" value="3.1415926535897931"/> -->
<xacro:arg name="prefix_ur3" default="ur3_"/>
<xacro:arg name="prefix_ur3e" default="ur3e_"/>
<!-- do not know -->
<xacro:arg name="transmission_hw_interface_ur3" default="hardware_interface/PositionJointInterface"/>
<xacro:arg name="transmission_hw_interface_ur3e" default="hardware_interface/PositionJointInterface"/>
<!-- common stuff -->
<xacro:include filename="$(find ur_description)/urdf/common.gazebo.xacro" />
<!-- ur3 -->
<xacro:include filename="$(find ur_description)/urdf/ur3.urdf.xacro" />
<!-- ur3e -->
<xacro:include filename="$(find ur_e_description)/urdf/ur3e.urdf.xacro" />
<!-- arm -->
<xacro:arg name="kinematics_config_ur3" default="$(find ur_description)/config/ur3_default.yaml"/>
<xacro:arg name="kinematics_config_ur3e" default="$(find ur_e_description)/config/ur3e_default.yaml"/>
<!-- arm right-->
<xacro:ur3_robot prefix="$(arg prefix_ur3)" joint_limited="false"
transmission_hw_interface="$(arg transmission_hw_interface_ur3)"
kinematics_file="${load_yaml('$(arg kinematics_config_ur3)')}"
/>
<!-- arm left-->
<xacro:ur3e_robot prefix="$(arg prefix_ur3e)" joint_limited="false"
transmission_hw_interface="$(arg transmission_hw_interface_ur3e)"
kinematics_file="${load_yaml('$(arg kinematics_config_ur3e)')}"
/>
<link name="world" />
<joint name="semaphore_robot_base_joint" type="fixed">
<parent link ="world" />
<child link = "semaphore_robot_base_link" />
<origin xyz="0.0 0.0 0.0" rpy="0.0 0.0 0.0" />
</joint>
<link name = "semaphore_robot_base_link" type="fixed">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="1" radius="0.075"/>
<!-- <mesh filename="package://ur_description/meshes/DH-UR-ASSY.stl"/> -->
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 0.5"/>
</material>
</visual>
</link>
<joint name="semaphore_transverse_joint" type="fixed">
<parent link ="semaphore_robot_base_link" />
<child link = "semaphore_transverse_link" />
<origin xyz="0.22 0.0 0.5" rpy="1.57 0.0 0.0" />
</joint>
<link name = "semaphore_transverse_link" type="fixed">
<visual>
<origin xyz=" 0 0 0" rpy="0 0 0" />
<geometry>
<cylinder length="0.2" radius="0.075"/>
</geometry>
<material name="yellow">
<color rgba="1 0.4 0 0.5"/>
</material>
</visual>
</link>
<joint name="right_world_joint" type="fixed">
<parent link="semaphore_transverse_link" />
<child link = "$(arg prefix_ur3)base_link" />
<origin xyz="0 0 0.1" rpy="0 0.0 -1.57" />
</joint>
<joint name="left_world_joint" type="fixed">
<parent link="semaphore_transverse_link" />
<child link = "$(arg prefix_ur3e)base_link" />
<origin xyz="0 0 -0.1" rpy="0 3.14 -1.57" />
</joint>
</robot>
通过对比可以发现,这里引入两个机器人模型,分别是来自 ur_description/urdf 的 ur3.urdf.xacro,以及来自ur_e_description/urdf 的 ur3e.urdf.xacro,还有一些列对应的config文件。这些都是UR公司封装好的,我们直接使用就好。(如果你是两个UR3,直接调用两个ur3.urdf.xacro,而起不同的名字就好,这非常关键,因为机器人如果和模型不同步的话机器人是无法被控制的。)
同理,我们也可以新建ur3+ur3e_joint_limited_robot.urdf.xacro 文件,把约束加上,我这里就不赘述了。
对应的启动文件我也进行了新建:
ur3+ur3e_upload.launch :
<?xml version="1.0"?>
<launch>
<arg name="limited" default="false" doc="If true, limits joint range [-PI, PI] on all joints." />
<arg name="transmission_hw_interface_ur3" default="hardware_interface/PositionJointInterface" />
<arg name="transmission_hw_interface_ur3e" default="hardware_interface/PositionJointInterface" />
<arg name="kinematics_config_ur3" default="$(find ur_description)/config/ur3_default.yaml"/>
<arg name="kinematics_config_ur3e" default="$(find ur_e_description)/config/ur3e_default.yaml"/>
<arg name="kinematics_config" default="$(find ur_description)/config/ur3_default.yaml"/>
<param unless="$(arg limited)" name="robot_description" command="$(find xacro)/xacro --inorder '$(find ur_description)/urdf/ur3+ur3e_robot.urdf.xacro'
transmission_hw_interface_ur3:=$(arg transmission_hw_interface_ur3)
transmission_hw_interface_ur3e:=$(arg transmission_hw_interface_ur3e)
kinematics_config_ur3:=$(arg kinematics_config_ur3)
kinematics_config_ur3e:=$(arg kinematics_config_ur3e)" />
<param if="$(arg limited)" name="robot_description" command="$(find xacro)/xacro --inorder '$(find ur_description)/urdf/ur3+ur3e_joint_limited_robot.urdf.xacro'
transmission_hw_interface_ur3:=$(arg transmission_hw_interface_ur3)
transmission_hw_interface_ur3e:=$(arg transmission_hw_interface_ur3e)
kinematics_config_ur3:=$(arg kinematics_config_ur3)
kinematics_config_ur3e:=$(arg kinematics_config_ur3e)" />
</launch>
至此,模型部分的操作完成,我们共补充了3个全新文件在相应目录,具体如下:
- (补充)将文件ur3+ur3e_upload.launch
放置在目录:~/ur_ws/src/fmauch_universal_robot/ur_description/launch 下 - (补充)将文件ur3+ur3e_joint_limited_robot.urdf.xacro
放置在目录:~/ur_ws/src/fmauch_universal_robot/ur_description/urdf 下
(这个没来得及改,参考ur3+ur3e_robot.urdf.xacro) - (补充)将文件ur3+ur3e_robot.urdf.xacro
放置在目录:~/ur_ws/src/fmauch_universal_robot/ur_description/urdf 下
现在运行ur3+ur3e_upload.launch 文件的话,应该可以加载出双臂机器人的模型(图后期补充)
然而模型只是开始,如何驱动两个机械臂还有很长的路要走。
X 最终功能包
先把最后完整的功能包放在这,已经测试完毕,教程慢慢更新。
(1)ur_ws(初代配置版本)
这个就是自己配的最基本UR驱动包。
(2)ur_ws(UR3+UR3e双臂机器人)
本ws在ur_ws基础上做了如下修改,以完成双臂机器人系统搭建:
part1:模型部分
(补充)将文件ur3+ur3e_upload.launch 放置在目录:~/ur_ws/src/fmauch_universal_robot/ur_description/launch 下
(补充)将文件ur3+ur3e_joint_limited_robot.urdf.xacro 放置在目录:~/ur_ws/src/fmauch_universal_robot/ur_description/urdf 下 (这个没来得及改,参考ur3+ur3e_robot.urdf.xacro)
(补充)将文件ur3+ur3e_robot.urdf.xacro 放置在目录:~/ur_ws/src/fmauch_universal_robot/ur_description/urdf 下
part2:驱动部分
(补充)将文件ur3+ur3e_bringup.launch 放置在目录:~/ur_ws/src/Universal_Robots_ROS_Driver/ur_robot_driver/launch 下
(改写)ur_common.launch 目录:~/ur_ws/src/Universal_Robots_ROS_Driver/ur_robot_driver/launch (修改内容:删掉了模型启用,因为在ur3+ur3e_bringup.launch启动了模型)
(改写)ur3_controllers.yaml 目录:~/ur_ws/src/Universal_Robots_ROS_Driver/ur_robot_driver/config (修改内容:加了前缀ur3_)
(改写)ur3e_controllers.yaml 目录:~/ur_ws/src/Universal_Robots_ROS_Driver/ur_robot_driver/config (修改内容:加了前缀ur3e_)
part3:控制器部分
替换了整个 ur3_moveit_config
具体修改了 ~/ur_ws/src/fmauch_universal_robot/ur3_moveit_config/config 中的六个文件:
controllers.yaml
fake_controllers.yaml
joint_limits.yaml
kinematics.yaml
ompl_planning.yaml
ur3.srdf
(修改内容:我懒得新建一个类似名为ur3+ur3e_moveit_config 的文件了,因为里边要改一堆launch文件的名字,所以就直接把 ur3_moveit_config 作为双臂机器的moveit_config 文件了)
part4:demo与启动部分
将功能包 ur3_flag_demo 放在 ~/ur_ws/src下
将启动脚本文件 ur3+ur3e_setup.sh 放在 ~/ur_ws 下
未完待续……


















 1092
1092

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











