







参考资料
60GHz 毫米波传感器 EVM
DCA1000EVM Data Capture Card
德州仪器(TI)官方视频课程培训
mmWave Studio GUI
这里官方给出了xWR6843和DCA1000捕获原始数据的参考指南,应以官方为准
Setup xWR6843 mmWave Sensor for DCA1000 and mmWave Studio for Raw Data Capture
软件
-
MMWAVE_STUDIO 02.01.01.00 (new feature - Updated FTDI drivers - Update RF Evaluation image for 6843 device)
最新版本的 mmwave studio 新增了FTDI驱动的自动安装,也就是dca收集板的驱动,后续不需要另外安装
-
ccs 12.1.0
安装步骤:
首先需要关闭系统杀毒软件和防火墙:
满足安装需求:
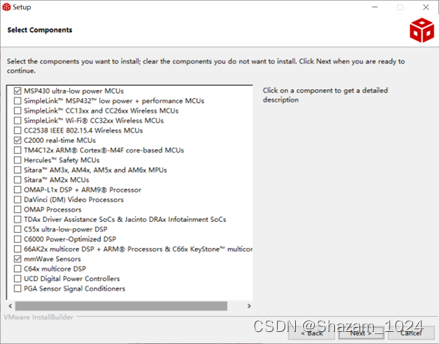
选择需要安装的组件:
-
CP210驱动 6843雷达板的串口驱动
-
Matlab runtime 8.5.1 32bit(需要安装32位)
-
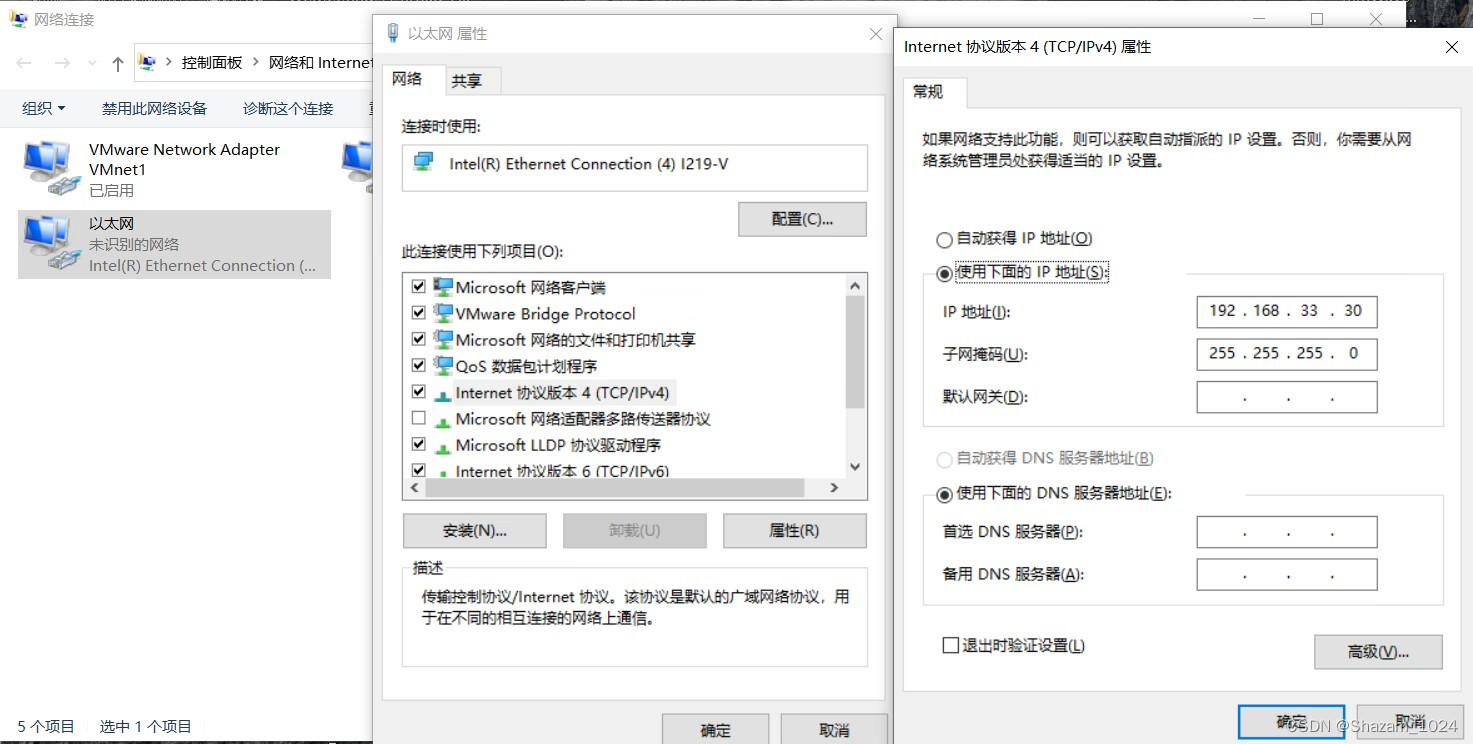
以太网接口配置(以太网端口地址为192.168.33.30,套接字为4098)
硬件
- iwr6843isk,micro USB cable
- dca1000EVM,micro USB cable, RJ45 Ethernet cable ,5V2A电源适配器
设备连线
其中:
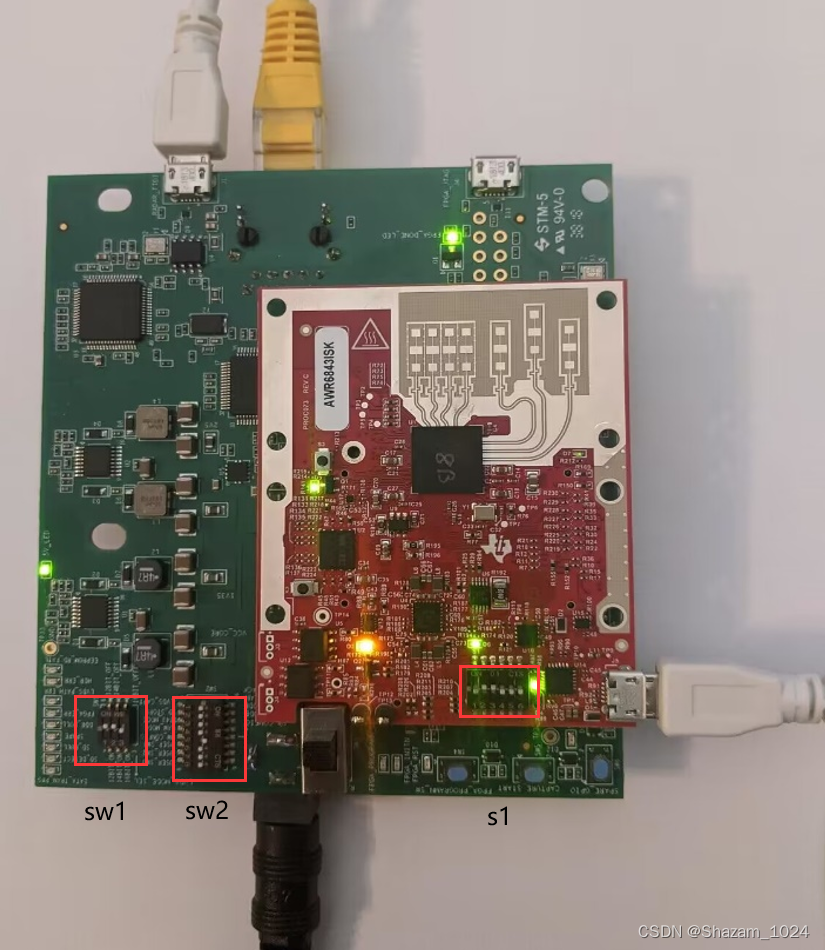
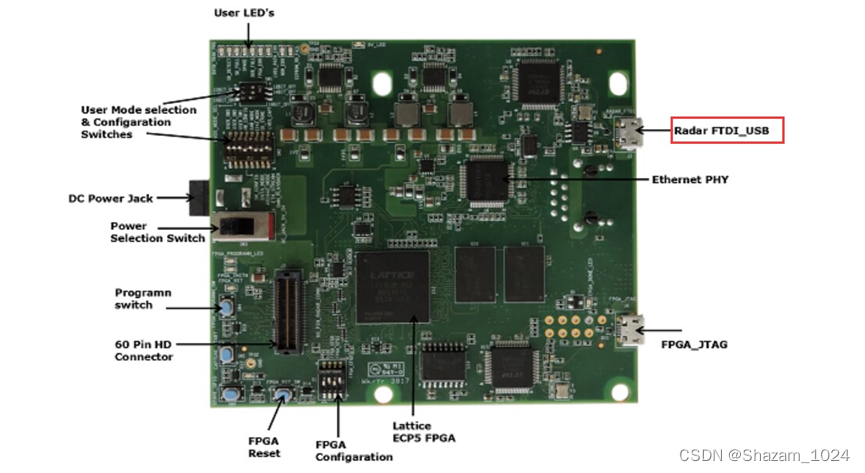
- dca的J3连接6843的J6 ,J1(FTDI)连接micro USB cable ,电源连接成功后,dca1000的LED10将会亮起
- dca跳线
SW1(switch 1):OFF OFF ON (LVDS 16 bit data)
SW2:(根据需求选择):Pin1 Pin15 Pin14 Pin4 - Pin11 - -
| Pin | Description | Pin | Description |
|---|---|---|---|
| Pin1 | capure mode | Pin16 | play back mode |
| Pin2 | 存储在SD卡 | Pin15 | PC端 |
| Pin3 | 4-lane LVDS data | Pin14 | 2-lane |
| Pin4 | raw mode将捕获所有LVDS数据 | Pin13 | 数据分离模型 |
| Pin6 | EEPROM | Pin11 | FPGA |
- iwr6843跳线
S1:OFF ON ON OFF OFF (dca1000的连接模式)
S1:ON OFF ON ON OFF (烧录模式)
S1:OFF OFF ON ON OFF (功能模式)
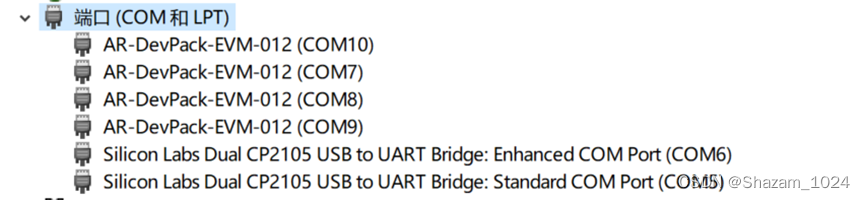
设备管理器显示:
MMWAVE STUDIO连接
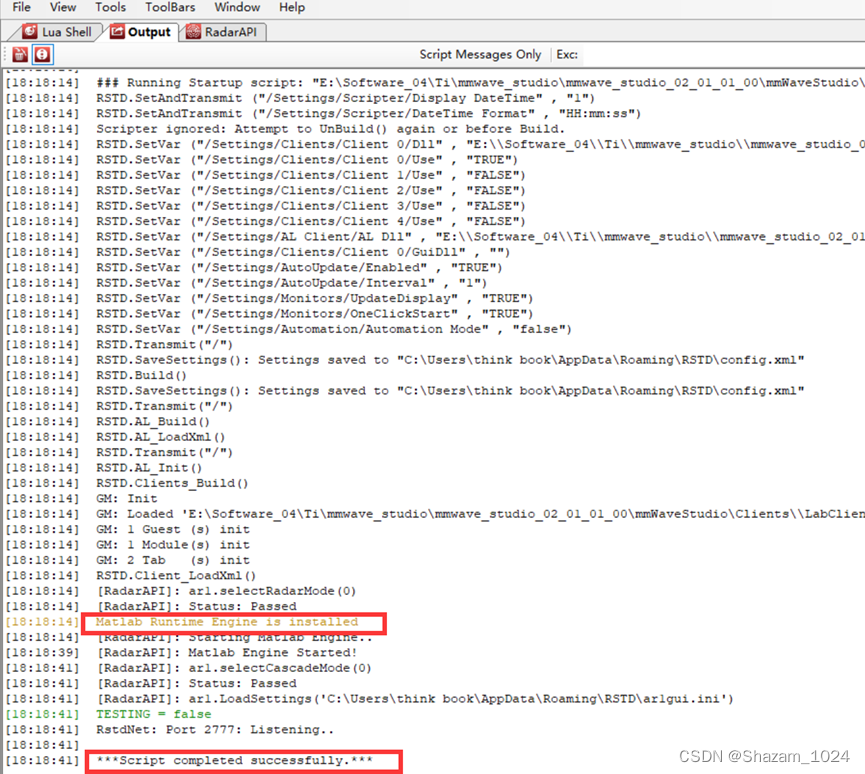
若上述步骤顺利完成,通过studio的output可看到加载成功:
选择RadarAPI窗口,按照提示的步骤序列号依次进行即可,这里我按照官方介绍的配置流程进行:
Connection
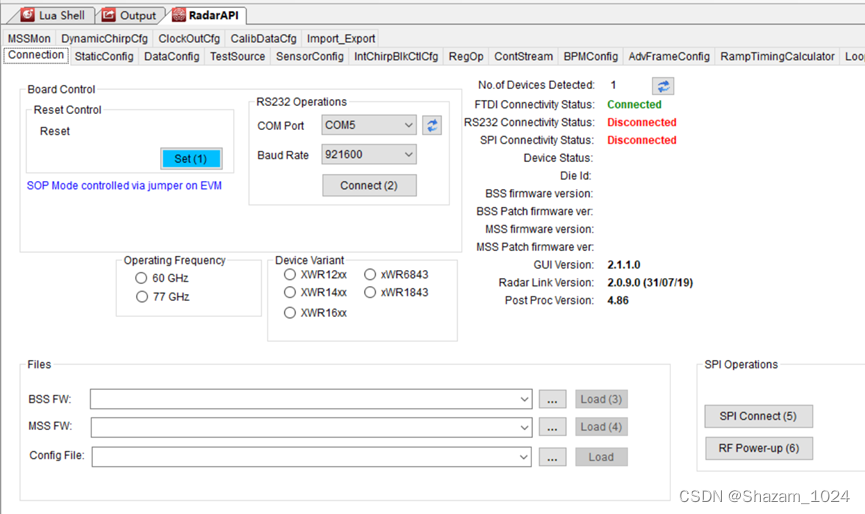
若FTDI 未显示connected,则需要手动安装FTDI驱动
其中:
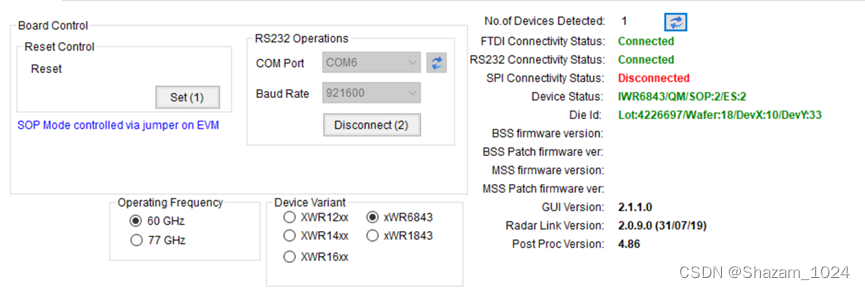
- Connect(2)RS232 Operations:(通过RS232接口提供雷达设备与PC连接,支持固件加载)
设备管理器中 enhanced com port(用户端口),standard com port(数据端口),COM Port选择用户端口,我这里是COM6:Baud Rate 使用默认的921600 bps
- Load(3)加载固件:
BSS FW:rf_eval_firmware\radarss 下对应雷达型号的.bin文件;
MSS FW:rf_eval_firmware\masterss 下对应雷达型号的.bin文件(mmwave studio的安装目录下)
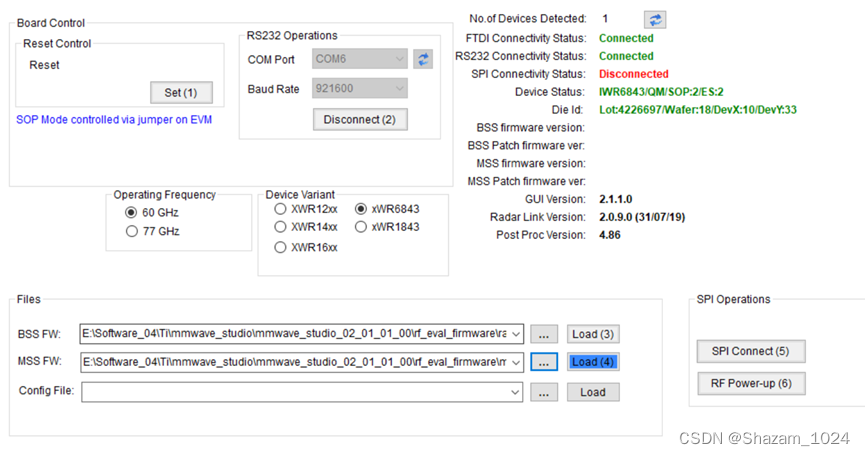
加载成功:
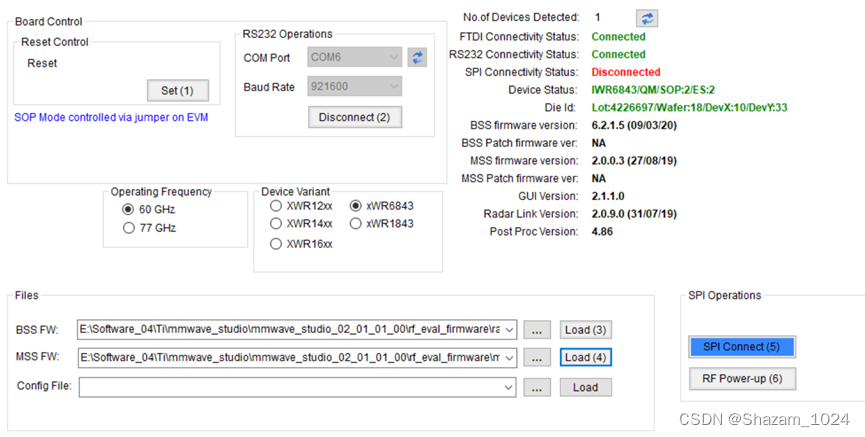
- SPI Connect(5):mmWave雷达设备使用SPI接口与外部主机处理器进行通信
若固件加载失败,则无法连接SPI Connect - RF Powered-up(6):
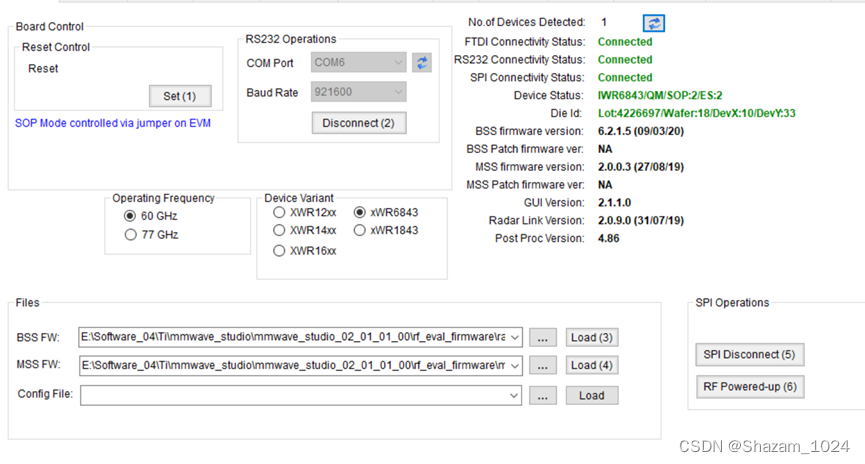
至此,设备连接成功
其中,操作信息和错误日志都会显示在output中,有问题可以通过output进行排除
以下步骤按照提示顺序配置即可,部分参数选择默认即可,其中:
StaticConfig
RF LOD bypass:使用IWR6843ISK不论使用几个TX数都无需配置该项
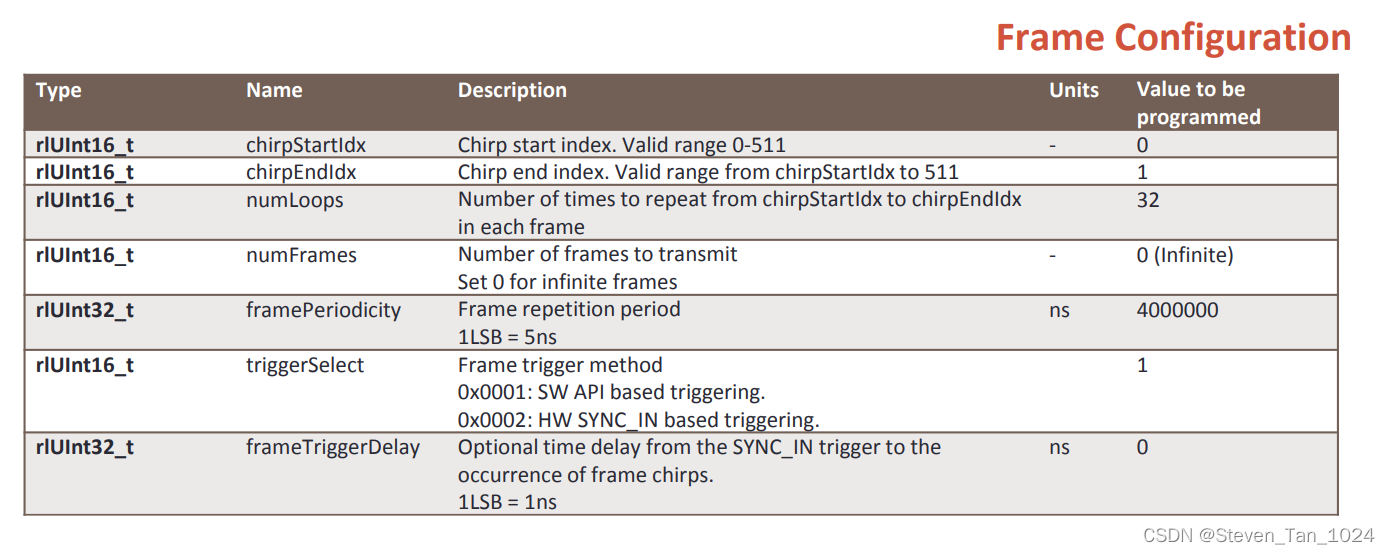
SensorConfig
官方提供了根据特定需求场景配置参数的工具
这里的参数配置主要根据应用需求进行配置,其中:
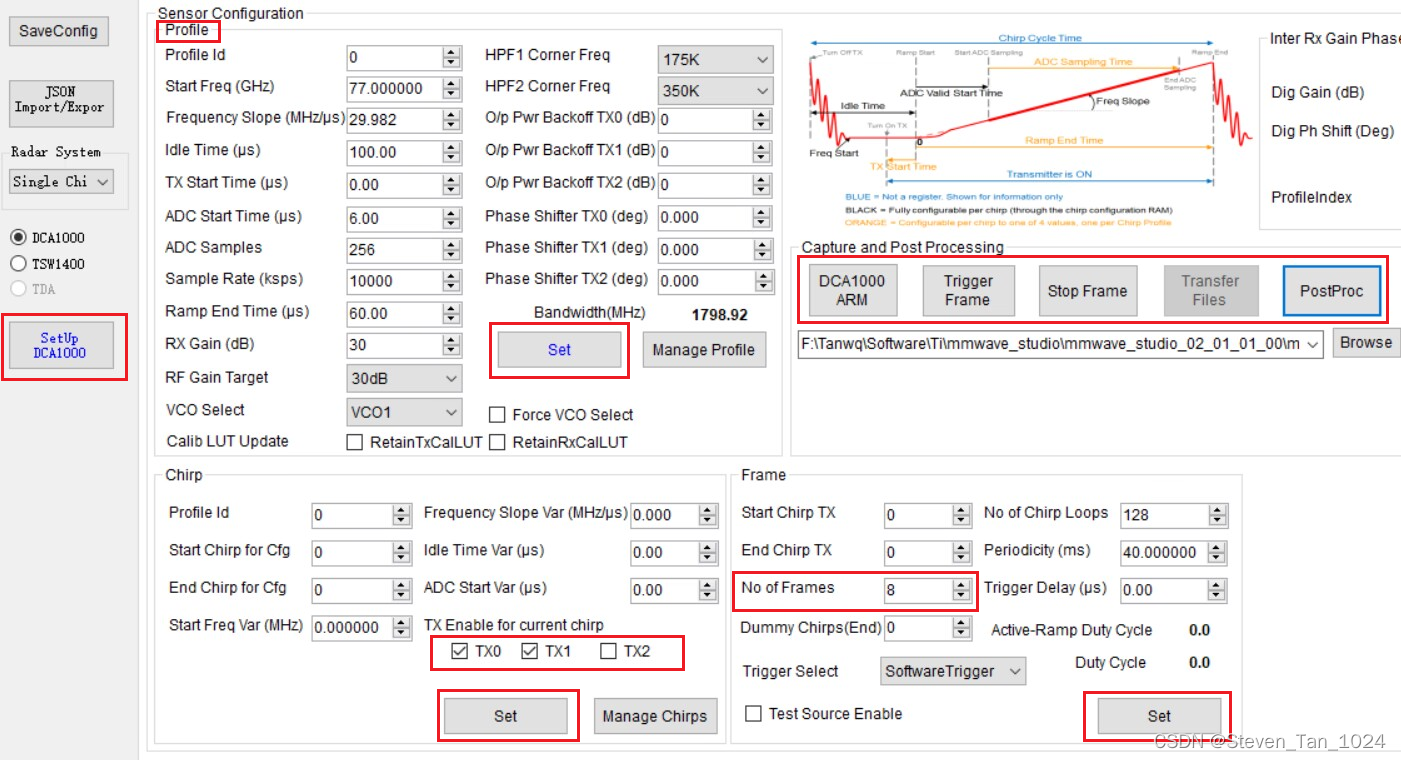
- Profile参考上述内容完成参数配置
- 这里的参数配置是相互制约且受设备限制的
例如Frequency Slope,其值增大会使得距离分辨率提高,但同时最大探测距离会降低;
当延长chirp的持续时间时(例如增加Ramp End time和idle time的和)会检测到的最大距离降低,但同时会提高距离分辨率;最大带宽为4GHz,也就是设定Ramp End time和Frequency Slope的值时,要保证其乘积小于4GHz,等等 - 其中部分参数的详细解释可见我的另一篇文章中的Programming Chirp Parameters in TI Radar Devices部分
- Chirp中的每一个使用的接收天线TX都需要配置;可对单独的chirp进行微调
若设置TDM-MIMO模式,请参考我的另一篇文章
-
Frame中,若捕获无限帧,则 No of Frames 设置为0,通过Stop Frame手动停止数据捕获
-
SetUp DCA1000中,读取到FPGA版本号
-
DCA1000 ARM中,确保在DCA1000 ARM和Trigger Frame之间有至少2秒的间隔;若参数发生修改,则需要重新触发 DCA1000 ARM;建议为后续捕获数据提供不同的文件名,因为它可以防止现有ADC数据的丢失
-
ADC数据默认的保存路径为 mmWaveStudio\PostProc
至此,原始数据捕获成功
其他
原始数据格式
关于原始数据格式及后续数据分析,可参考我的另一篇文章
后处理
可直接对已经捕获的数据进行后处理:
打开mmwave studio后,进入Sensor Config,为Capture and Post Processing提供一个空路径

进入后处理界面后,分别点击 Load .log、Load .bin 选择相应文件即可(默认文件名:adc_data_LogFile.txt、adc_data.bin)
导入JSON文件
LUA脚本
ar1开头的脚本命令可以保存为LUA文件,实现自动化配置
操作步骤可参考以下官方文档:

















 2756
2756

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









