






 博客先借助三角形面积证明四个有序点交比 BC⋅AD/AC⋅BD = bc⋅ad/ac⋅bd,分别在世界坐标和像素坐标中推导。还介绍了工业镜头,它是机器视觉核心硬件,可分多种类型,并阐述其工作距离、焦距、景深、视野等基础参数及相关关系。
博客先借助三角形面积证明四个有序点交比 BC⋅AD/AC⋅BD = bc⋅ad/ac⋅bd,分别在世界坐标和像素坐标中推导。还介绍了工业镜头,它是机器视觉核心硬件,可分多种类型,并阐述其工作距离、焦距、景深、视野等基础参数及相关关系。
A
C
B
C
/
A
D
B
D
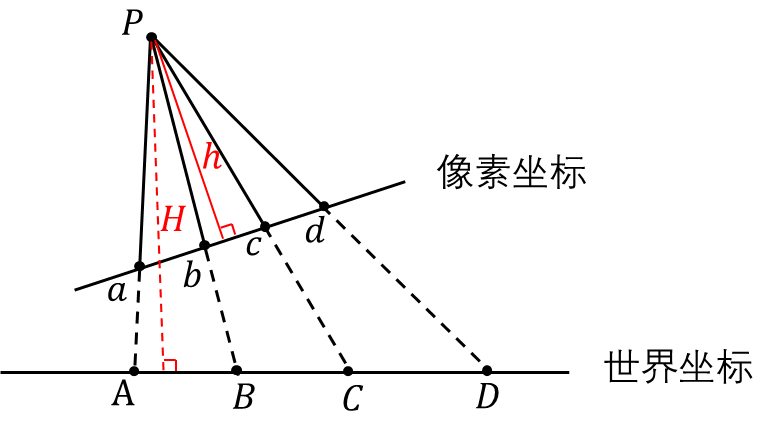
为四个有序点的交比,求证
A
C
⋅
B
D
B
C
⋅
A
D
=
a
c
⋅
b
d
b
c
⋅
a
d
。
\frac{AC }{BC} / \frac{AD }{BD} 为四个有序点的交比,求证 \frac{AC \cdot BD}{BC \cdot AD} = \frac{ac \cdot bd}{bc \cdot ad}。
BCAC/BDAD为四个有序点的交比,求证BC⋅ADAC⋅BD=bc⋅adac⋅bd。
借助三角形的面积证明。
世界坐标中:
S
Δ
P
A
C
=
1
2
⋅
A
C
⋅
H
=
1
2
⋅
P
A
⋅
P
C
⋅
sin
∠
A
P
C
⇒
A
C
=
P
A
⋅
P
C
H
⋅
sin
∠
A
P
C
S
Δ
P
B
C
=
1
2
⋅
B
C
⋅
H
=
1
2
⋅
P
B
⋅
P
C
⋅
sin
∠
B
P
C
⇒
B
C
=
P
B
⋅
P
C
H
⋅
sin
∠
B
P
C
S
Δ
P
B
D
=
1
2
⋅
B
D
⋅
H
=
1
2
⋅
P
B
⋅
P
D
⋅
sin
∠
B
P
D
⇒
B
D
=
P
B
⋅
P
D
H
⋅
sin
∠
B
P
D
S
Δ
P
A
D
=
1
2
⋅
A
D
⋅
H
=
1
2
⋅
P
A
⋅
P
D
⋅
sin
∠
A
P
D
⇒
A
D
=
P
A
⋅
P
D
H
⋅
sin
∠
A
P
D
S_{\Delta PAC} = \frac{1}{2} \cdot AC \cdot H = \frac{1}{2} \cdot PA \cdot PC \cdot \sin{\angle APC} \\ \Rightarrow AC = \frac{PA \cdot PC}{H} \cdot \sin{\angle APC} \\ {}\\ S_{\Delta PBC} = \frac{1}{2} \cdot BC \cdot H = \frac{1}{2} \cdot PB \cdot PC \cdot \sin{\angle BPC} \\ \Rightarrow BC = \frac{PB \cdot PC}{H} \cdot \sin{\angle BPC}\\ {}\\ S_{\Delta PBD} = \frac{1}{2} \cdot BD \cdot H = \frac{1}{2} \cdot PB \cdot PD \cdot \sin{\angle BPD} \\ \Rightarrow BD = \frac{PB \cdot PD}{H} \cdot \sin{\angle BPD}\\ {}\\ S_{\Delta PAD} = \frac{1}{2} \cdot AD \cdot H = \frac{1}{2} \cdot PA \cdot PD \cdot \sin{\angle APD} \\\Rightarrow AD = \frac{PA \cdot PD}{H} \cdot \sin{\angle APD}
SΔPAC=21⋅AC⋅H=21⋅PA⋅PC⋅sin∠APC⇒AC=HPA⋅PC⋅sin∠APCSΔPBC=21⋅BC⋅H=21⋅PB⋅PC⋅sin∠BPC⇒BC=HPB⋅PC⋅sin∠BPCSΔPBD=21⋅BD⋅H=21⋅PB⋅PD⋅sin∠BPD⇒BD=HPB⋅PD⋅sin∠BPDSΔPAD=21⋅AD⋅H=21⋅PA⋅PD⋅sin∠APD⇒AD=HPA⋅PD⋅sin∠APD
A
C
⋅
B
D
B
C
⋅
A
D
=
P
A
⋅
P
B
⋅
P
C
⋅
P
D
H
2
⋅
sin
∠
A
P
C
⋅
sin
∠
B
P
D
P
A
⋅
P
B
⋅
P
C
⋅
P
D
H
2
⋅
sin
∠
B
P
C
⋅
sin
∠
A
P
D
=
sin
∠
A
P
C
⋅
sin
∠
B
P
D
sin
∠
B
P
C
⋅
sin
∠
A
P
D
\begin{aligned} \frac{AC \cdot BD}{BC \cdot AD} &= \frac{\frac{PA \cdot PB\cdot PC\cdot PD}{H^2} \cdot \sin{\angle APC} \cdot \sin{\angle BPD}}{\frac{PA \cdot PB\cdot PC\cdot PD}{H^2} \cdot \sin{\angle BPC} \cdot \sin{\angle APD}} \\ &= \frac{\sin{\angle APC} \cdot \sin{\angle BPD}}{\sin{\angle BPC} \cdot \sin{\angle APD}} \end{aligned}
BC⋅ADAC⋅BD=H2PA⋅PB⋅PC⋅PD⋅sin∠BPC⋅sin∠APDH2PA⋅PB⋅PC⋅PD⋅sin∠APC⋅sin∠BPD=sin∠BPC⋅sin∠APDsin∠APC⋅sin∠BPD
像素坐标中:
S
Δ
P
a
c
=
1
2
⋅
a
c
⋅
h
=
1
2
⋅
P
a
⋅
P
c
⋅
sin
∠
a
P
c
⇒
a
c
=
P
a
⋅
P
c
h
⋅
sin
∠
a
P
c
S
Δ
P
b
c
=
1
2
⋅
b
c
⋅
h
=
1
2
⋅
P
b
⋅
P
c
⋅
sin
∠
b
P
c
⇒
b
c
=
P
b
⋅
P
c
h
⋅
sin
∠
b
P
c
S
Δ
P
b
d
=
1
2
⋅
b
d
⋅
h
=
1
2
⋅
P
b
⋅
P
d
⋅
sin
∠
b
P
d
⇒
b
d
=
P
b
⋅
P
d
h
⋅
sin
∠
b
P
d
S
Δ
P
a
d
=
1
2
⋅
a
d
⋅
h
=
1
2
⋅
P
a
⋅
P
d
⋅
sin
∠
a
P
d
⇒
a
d
=
P
a
⋅
P
d
h
⋅
sin
∠
a
P
d
S_{\Delta Pac} = \frac{1}{2} \cdot ac \cdot h = \frac{1}{2} \cdot Pa \cdot Pc \cdot \sin{\angle aPc} \\ \Rightarrow ac = \frac{Pa \cdot Pc}{h} \cdot \sin{\angle aPc} \\ {}\\ S_{\Delta Pbc} = \frac{1}{2} \cdot bc \cdot h = \frac{1}{2} \cdot Pb \cdot Pc \cdot \sin{\angle bPc} \\ \Rightarrow bc = \frac{Pb \cdot Pc}{h} \cdot \sin{\angle bPc}\\ {}\\ S_{\Delta Pbd} = \frac{1}{2} \cdot bd \cdot h = \frac{1}{2} \cdot Pb \cdot Pd \cdot \sin{\angle bPd} \\ \Rightarrow bd = \frac{Pb \cdot Pd}{h} \cdot \sin{\angle bPd}\\ {}\\ S_{\Delta Pad} = \frac{1}{2} \cdot ad \cdot h = \frac{1}{2} \cdot Pa \cdot Pd \cdot \sin{\angle aPd} \\\Rightarrow ad = \frac{Pa \cdot Pd}{h} \cdot \sin{\angle aPd}
SΔPac=21⋅ac⋅h=21⋅Pa⋅Pc⋅sin∠aPc⇒ac=hPa⋅Pc⋅sin∠aPcSΔPbc=21⋅bc⋅h=21⋅Pb⋅Pc⋅sin∠bPc⇒bc=hPb⋅Pc⋅sin∠bPcSΔPbd=21⋅bd⋅h=21⋅Pb⋅Pd⋅sin∠bPd⇒bd=hPb⋅Pd⋅sin∠bPdSΔPad=21⋅ad⋅h=21⋅Pa⋅Pd⋅sin∠aPd⇒ad=hPa⋅Pd⋅sin∠aPd
a
c
⋅
b
d
b
c
⋅
a
d
=
P
a
⋅
P
b
⋅
P
c
⋅
P
d
h
2
⋅
sin
∠
a
P
c
⋅
sin
∠
b
P
d
P
a
⋅
P
b
⋅
P
c
⋅
P
d
h
2
⋅
sin
∠
b
P
c
⋅
sin
∠
a
P
d
=
sin
∠
a
P
c
⋅
sin
∠
b
P
d
sin
∠
b
P
c
⋅
sin
∠
a
P
d
\begin{aligned} \frac{ac \cdot bd}{bc \cdot ad} &= \frac{\frac{Pa \cdot Pb\cdot Pc\cdot Pd}{h^2} \cdot \sin{\angle aPc} \cdot \sin{\angle bPd}}{\frac{Pa \cdot Pb\cdot Pc\cdot Pd}{h^2} \cdot \sin{\angle bPc} \cdot \sin{\angle aPd}} \\ &= \frac{\sin{\angle aPc} \cdot \sin{\angle bPd}}{\sin{\angle bPc} \cdot \sin{\angle aPd}} \end{aligned}
bc⋅adac⋅bd=h2Pa⋅Pb⋅Pc⋅Pd⋅sin∠bPc⋅sin∠aPdh2Pa⋅Pb⋅Pc⋅Pd⋅sin∠aPc⋅sin∠bPd=sin∠bPc⋅sin∠aPdsin∠aPc⋅sin∠bPd
∵
sin
∠
A
P
C
=
sin
∠
a
P
c
sin
∠
B
P
D
=
sin
∠
b
P
d
sin
∠
B
P
C
=
sin
∠
b
P
c
sin
∠
A
P
D
=
sin
∠
a
P
d
∴
A
C
⋅
B
D
B
C
⋅
A
D
=
a
c
⋅
b
d
b
c
⋅
a
d
\begin {aligned} \because \sin{\angle APC} &= \sin{\angle aPc} \\ \sin{\angle BPD} &= \sin{\angle bPd} \\ \sin{\angle BPC} &= \sin{\angle bPc} \\ \sin{\angle APD} &= \sin{\angle aPd} \\ \therefore \frac{AC \cdot BD}{BC \cdot AD} &= \frac{ac \cdot bd}{bc \cdot ad} \end{aligned}
∵sin∠APCsin∠BPDsin∠BPCsin∠APD∴BC⋅ADAC⋅BD=sin∠aPc=sin∠bPd=sin∠bPc=sin∠aPd=bc⋅adac⋅bd
工业镜头
参考文献
工业镜头是运用于工业自动化领域的摄像或摄影镜头,主要作用是进行光学成像。
工业镜头是机器视觉中必不可少的核心基础硬件,对成像的质量有关键影响。可以分为fa镜头(也有称CCTV镜头)、变倍镜头(有手动也有自动)、远心镜头(一般有物方远心和双远心)等。
基础参数
1.工作距离WD:指镜头下端到物体表面的距离。
机器视觉光学系统所需要的空间,不仅要考虑相机镜头组本身的长度,还要留下镜头的工作距离。如果空间无法满足这两者之和,应该立即考虑棱镜改变工作方向,或是重新定制光学系统。
2.焦距:镜头到成像面的距离。
3.景深DOF:镜头能够看清的纵深范围。
景深与焦距的关系是:焦距越长,景深越小;焦距越短,景深越大。
景深与工作距离的关系是:工作距离越短,镜头离物体越近,景深越小,反之则越大。
4.视野FOV:指镜头能够看到的最大范围。简单来说就是镜头能够正常进行检测工作的区域。
对于大面积检测,选择大视野的镜头能够显著地节省检测成本。但是选择时也要兼具分辨率,大视野很容易发生视野边缘灰度值不足的情况,一定要找专业光学定制!

















 3051
3051

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









