







 超级会员免费看
超级会员免费看
少年听雨歌楼上。红烛昏罗帐。壮年听雨客舟中。江阔云低、断雁叫西风。
而今听雨僧庐下。鬓已星星也。悲欢离合总无情。一任阶前、点滴到天明。
一、算法速览
AABB包围盒就是将点云用一个各条边沿着坐标轴分布的盒子包起来,所以大概是下面这个样子的
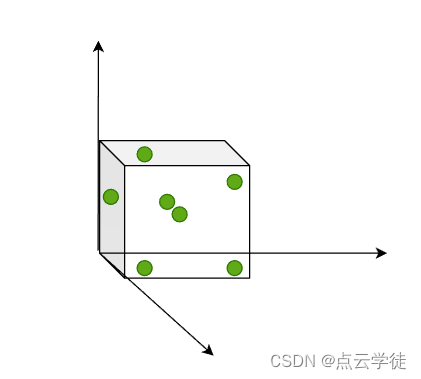
这里包围盒的顶点计算就是用之前的坐标最值得到的,这种类型的包围盒计算最简单,也最快,它可以用于体积的计算,相比八叉树划分体素计算虽然不那么准确,但够快
二、算法实现
1.代码
代码如下(示例):
import open3d as o3d
import numpy as np
# 构建点云对象
pcd = o3d.io.read_point_cloud("D:\\shuju\\简单树木.pcd")
# 获取xyz方向上的最大最小值
max_bound 
 订阅专栏 解锁全文
订阅专栏 解锁全文

















 36万+
36万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











