









平台:华硕 Thinker Edge R 瑞芯微 RK3399Pro
固件版本:Tinker_Edge_R-Debian-Stretch-V1.0.4-20200615
参考资料:
RK3399(Debian9 - stretch) 安装 ROS Lunar —— WB8933
Debian 9 strech 安装 ROS lunar —— 白菜菜白
更新linux时候提示无法“由于没有公钥,无法验证下列签名 ***”的解决方案 —— sanbo_xyz
rosdep update一定能通过简单方法 —— 不加辣先生
配置源
更换国内源:
sudo mkdir -p /etc/apt/sources.list.d/ && sudo touch /etc/apt/sources.list.d/ros-latest.list
sudo sh -c 'echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
设置 Key
sudo apt-cache search -n dirmngr
sudo apt-get install dirmngr
sudo apt update
若出现如下报错,

则导入其公钥即可
sudo apt-key adv --keyserver keyserver.ubuntu.com --recv-keys F42ED6FBAB17C654 #此处F42ED6FBAB17C654需要是错误提示的key
再次
sudo apt update
后不再报错:

安装
sudo apt install aptitude -y
安装ROS:
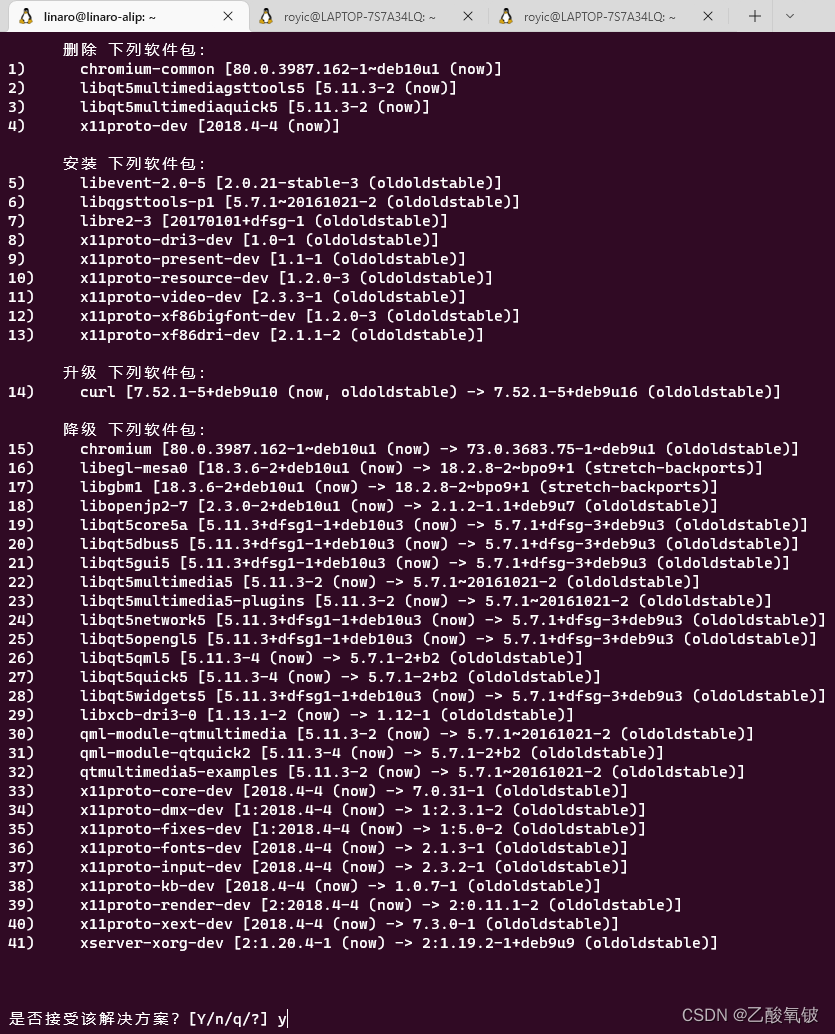
输入sudo aptitude install ros-按住tab补全搜寻有无类似ros-版本代号-desktop-full的安装包,我这里以ros-lunar-desktop-full版本为例:
sudo aptitude install ros-lunar-desktop-full
选择可以接受的方案安装
重启
sudo reboot
初始化rosdep
sudo apt install git -y
将下面仓库的内容clone到本地
git clone https://gitee.com/ohhuo/rosdistro.git
记录rosdistro存放地址,例如/home/linaro/rosdistro,linaro为用户名
修改如下文件,其中python2.7视系统默认python版本而定,可通过如下命令查阅,下同
python --version

sudo nano /usr/lib/python2.7/dist-packages/rosdep2/rep3.py
将REP3_TARGETS_URL = ‘https://raw.githubusercontent.com/ros/rosdistro/master/releases/targets.yaml’ 替换成 'file:///home/linaro/rosdistro/releases/targets.yaml'
替换后的/home/linaro 即为第一步clone内容的存放地址

修改如下文件
sudo nano /usr/lib/python2.7/dist-packages/rosdistro/__init__.py
将原来文件中的 DEFAULT_INDEX_URL = ‘https://raw.githubusercontent.com/ros/rosdistro/master/index-v4.yaml’ 替换成 'file:///home/linaro/rosdistro/index-v4.yaml'
替换后的/home/linaro 即为第一步clone内容的存放地址

到/etc/ros/rosdep/sources.list.d下创建20-default.list文件
sudo mkdir -p /etc/ros/rosdep/sources.list.d/
创建20-default.list文档
sudo nano /etc/ros/rosdep/sources.list.d/20-default.list
其内容为
# os-specific listings first
yaml file:///home/linaro/rosdistro/rosdep/osx-homebrew.yaml osx
# generic
yaml file:///home/linaro/rosdistro/rosdep/base.yaml
yaml file:///home/linaro/rosdistro/rosdep/python.yaml
yaml file:///home/linaro/rosdistro/rosdep/ruby.yaml
gbpdistro file:///home/linaro/rosdistro/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead

注意的是yaml file://表示固定格式/home…表示文件目录,所以是yaml file:///
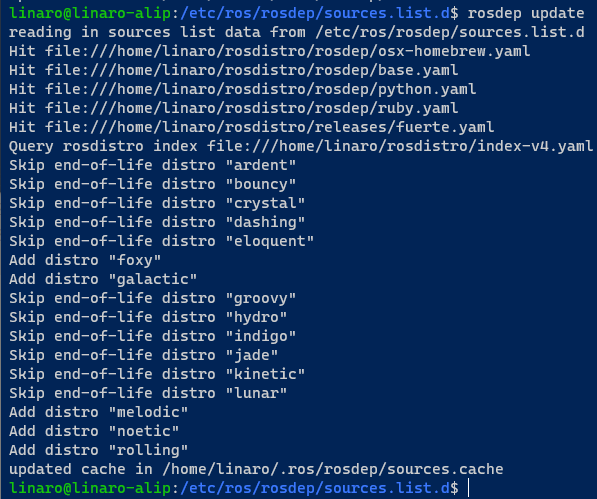
在终端中执行
rosdep update
环境配置
echo "source /opt/ros/lunar/setup.bash" >> ~/.bashrc
source ~/.bashrc
测试
参考ROS安装并运行小乌龟
在终端中运行以下命令:
roscore

新开一个终端,运行以下命令,打开小乌龟窗口:
rosrun turtlesim turtlesim_node

新开一个终端,运行以下命令,打开乌龟控制窗口,可使用方向键控制乌龟运动:
rosrun turtlesim turtle_teleop_key

选中控制窗口,按方向键,可看到小乌龟窗口中乌龟在运动
新开一个终端,运行以下命令,可以看到ROS的图形化界面,展示结点的关系:
rqt_graph

至此,测试完成,说明ROS安装没有问题。
安装rosinstall
sudo apt install python-rosinstall python-rosinstall-generator python-wstool build-essential

卸载
sudo apt remove ros-*
















 1799
1799











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











