







前言
学习一下基础
基本思想
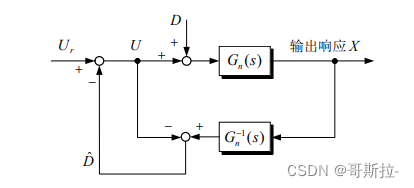
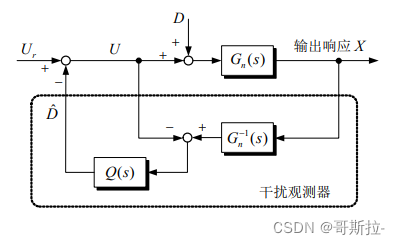
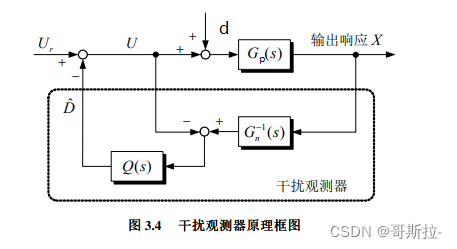
原理框图
则系统输出X为
X
=
G
n
(
s
)
U
r
+
G
n
(
s
)
[
1
−
Q
(
s
)
]
D
X=G_n(s)U_r+G_n(s)[1-Q(s)]D
X=Gn(s)Ur+Gn(s)[1−Q(s)]D
Q
(
s
)
Q(s)
Q(s) 具有低通滤波特性,其作用在于:
(1)
G
n
G_n
Gn的相对阶不为0,其逆在物理上不可实现
(2)系统存在不确定性,无法获取被控对象精确地数学模型
(3)系统传感器的测量噪声会影响系统的控制性能
我的问题
1.什么物理上不可实现
我们在设计控制器时,积分在物理上是可实现的,但是微分是不可实现的微分需要用到未来信息,往往用差分代替。对于我们不可实现的名义逆模型 G n − 1 G^{-1}_n Gn−1 , Q ( s ) G n − 1 Q(s)G^{-1}_n Q(s)Gn−1是可以实现的
2.什么是低通滤波
例如: Q ( s ) = a s + a Q(s)=\frac{a}{s+a} Q(s)=s+aa
s
=
j
w
→
G
(
j
w
)
=
a
a
+
j
w
=
a
(
a
−
j
w
)
(
a
+
j
w
)
(
a
−
j
w
)
=
a
2
a
2
+
w
2
+
−
a
w
a
2
+
w
2
j
s=jw\rightarrow G(jw)=\frac{a}{a+jw}=\frac{a(a-jw)}{(a+jw)(a-jw)}=\frac{a^2}{a^2+w^2}+-\frac{aw}{a^2+w^2}j
s=jw→G(jw)=a+jwa=(a+jw)(a−jw)a(a−jw)=a2+w2a2+−a2+w2awj
∣
G
(
j
w
)
∣
=
1
1
+
w
a
2
|G(jw)|=\sqrt{\frac{1}{1+{\frac{w}{a}}^2}}
∣G(jw)∣=1+aw21
当
w
<
<
a
⟹
∣
G
(
j
w
)
∣
→
1
w<<a\implies |G(jw)|\rightarrow 1
w<<a⟹∣G(jw)∣→1
当
w
>
>
a
⟹
∣
G
(
j
w
)
∣
→
0
w>>a\implies |G(jw)|\rightarrow 0
w>>a⟹∣G(jw)∣→0
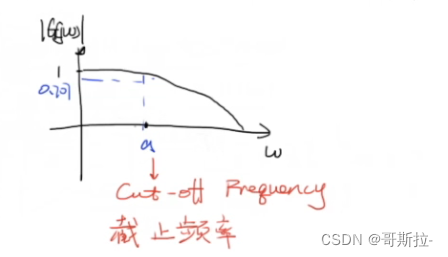
这说明频率越大,振幅响应越小,所以就是典型的低通滤波器
3.在干扰观测器中,截止频率设置得过高会怎么样
上图中D包含了外部干扰和模型不确定性:
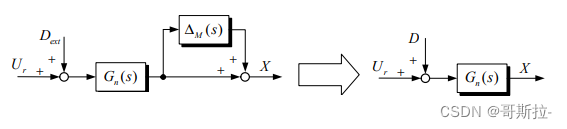
当
G
p
(
s
)
=
G
n
(
s
)
(
1
+
Δ
M
(
s
)
)
G_p(s)=G_n(s)(1+\Delta M(s))
Gp(s)=Gn(s)(1+ΔM(s))
传递函数
S
(
s
)
=
G
p
G
n
G
n
+
(
G
p
−
G
n
)
Q
S(s)=\frac{G_pG_n}{G_n+(G_p-G_n)Q}
S(s)=Gn+(Gp−Gn)QGpGn
取带有干扰观测器的被控对象的灵敏度函数
S
(
s
)
S(s)
S(s)和补灵敏度函数
T
(
s
)
T(s)
T(s)
S
(
s
)
=
G
n
[
1
−
Q
(
s
)
]
G
n
(
s
)
+
[
G
p
(
s
)
−
G
n
(
s
)
]
Q
(
s
)
S(s)=\frac{G_n[1-Q(s)]}{G_n(s)+[G_p(s)-G_n(s)]Q(s)}
S(s)=Gn(s)+[Gp(s)−Gn(s)]Q(s)Gn[1−Q(s)]
T
(
s
)
=
1
−
S
(
s
)
=
G
n
(
s
)
Q
(
s
)
G
n
(
s
)
+
[
G
p
(
s
)
−
G
n
(
s
)
]
Q
(
s
)
=
G
n
(
s
)
Q
(
s
)
G
n
(
s
)
+
Δ
M
(
s
)
Q
(
s
)
T(s)=1-S(s)=\frac{G_n(s)Q(s)}{G_n(s)+[G_p(s)-G_n(s)]Q(s)}=\frac{G_n(s)Q(s)}{G_n(s)+\Delta _M(s)Q(s)}
T(s)=1−S(s)=Gn(s)+[Gp(s)−Gn(s)]Q(s)Gn(s)Q(s)=Gn(s)+ΔM(s)Q(s)Gn(s)Q(s)
有小增益定理,系统鲁棒稳定的充分必要条件:
∣
∣
Δ
M
(
j
w
)
T
(
j
w
)
∣
∣
≤
1
||\Delta _M(jw)T(jw)||\leq1
∣∣ΔM(jw)T(jw)∣∣≤1
通常情况下被控对象的不确定性随着频率提高而增大,即
Δ
M
(
j
w
)
\Delta _M(jw)
ΔM(jw)随着频率的增加而增大。在一般的运动控制系统工作频率范围,
Δ
M
(
j
w
)
\Delta _M(jw)
ΔM(jw)很小。此时
T
(
s
)
≈
Q
(
s
)
T(s)\approx Q(s)
T(s)≈Q(s),近似为:
∣
∣
Δ
M
(
j
w
)
Q
(
j
w
)
∣
∣
≤
1
||\Delta _M(jw)Q(jw)||\leq1
∣∣ΔM(jw)Q(jw)∣∣≤1
截止频率设置越高系统抑制干扰能力越强,同时也导致补灵敏度函数在高频段具有较大的增益,干扰观测器的鲁棒稳定性变差。
参考
《面向实世界触觉通信的先进运动控制》
















 2万+
2万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









