










报错
对于每一个人来说,刷完固件一堆看不懂的报错,是人生的一大劫难,我会不断总结完善遇到的问题和错误
首先就是固件版本问题,对于不同的飞控来说,最佳适配的版本是不一样的,一个牌子不同型号的飞控在不同固件都可能会有各种Bug,总的来讲报错常见为以下:
安全开关 Safety switch
我在刷写车辆模型中经常会遇到安全开关启用导致飞控无法解锁,如果你不用安全开关的话,就直接改参数将其关掉,就不会报安全开关的错误了。
BRD_SAFETY_DEFLT = 0 可禁用未配备系统的开关。
(在较旧的固件版本中)叫BRD_SAFETYENABLE
BRD_SAFETYOPTION 此参数控制安全按钮的行为。
BRD_SAFETY_MASK 可用于设置哪些单个通道在安全开关上保持启用状态。
将以上三个参数设为0即为关闭安全开关,具体官方讲解点这里→点我
传感器
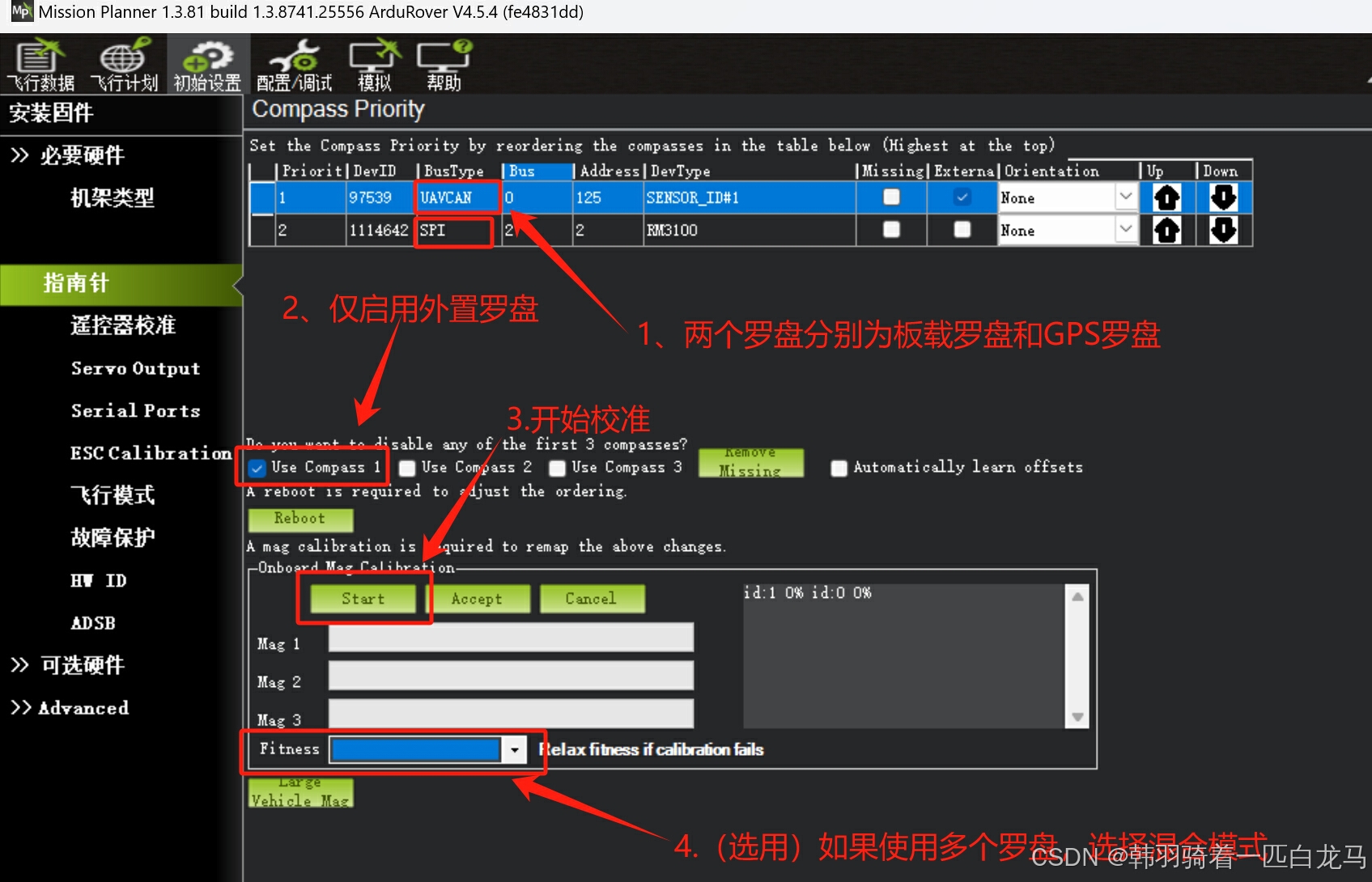
指南针
在不同的工况下,对于指南针的使用需求是不同的,在无人船无人车这一类紧贴金属外壳,飞控内部指南针容易受到干扰,因此使用GPS的外置罗盘会更好;具体操作如下:
雷迅里通常我们使用的GPS是10Pin的端子,也有使用CAN总线通信的,这时就需要对飞控进行一定的设置,具体要修改的参数直接看官方文档就可以;点我,雷迅GPS设置说明
对于尺寸合理,人能搬得动的载具,最好是在安装完成后校准一次传感器,这样的电磁环境是最稳定准确的。


















 4345
4345

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











