







https://download.csdn.net/download/m0_72607891/88599687
代码下载地址
1.前期准备
准备通过舵机转向的无人车地盘、遥控器、地面站电脑、飞控等。安装驱动程序、端口程序、netframwork等,不再赘述。
2.安装固件
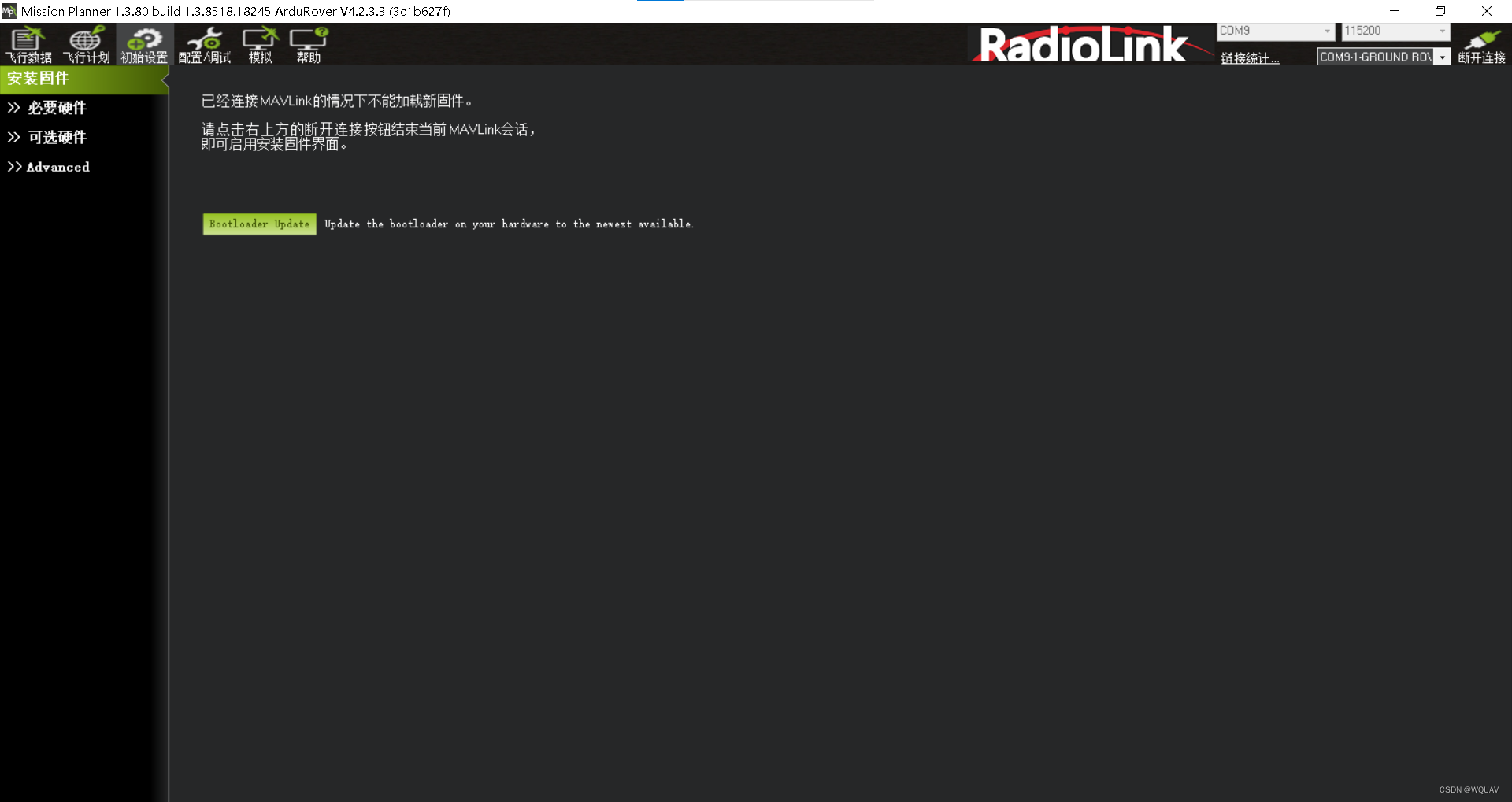
安装ardurover固件,如果在线失败,选择官方最新的固件下载到本地,选择本地安装。
3.调试
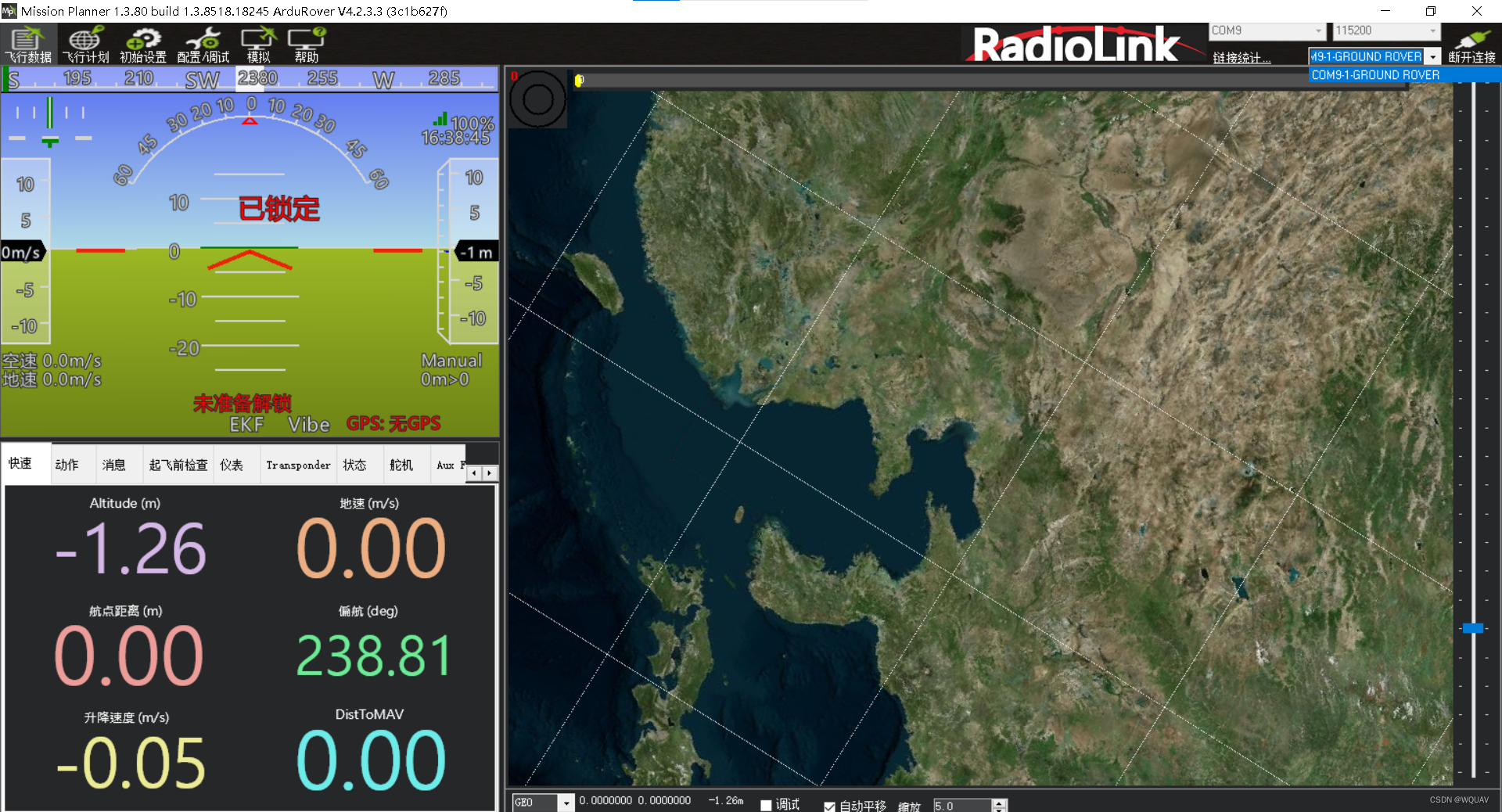
1.选择识别出的com口,连接飞控。
2.校准加速度计。
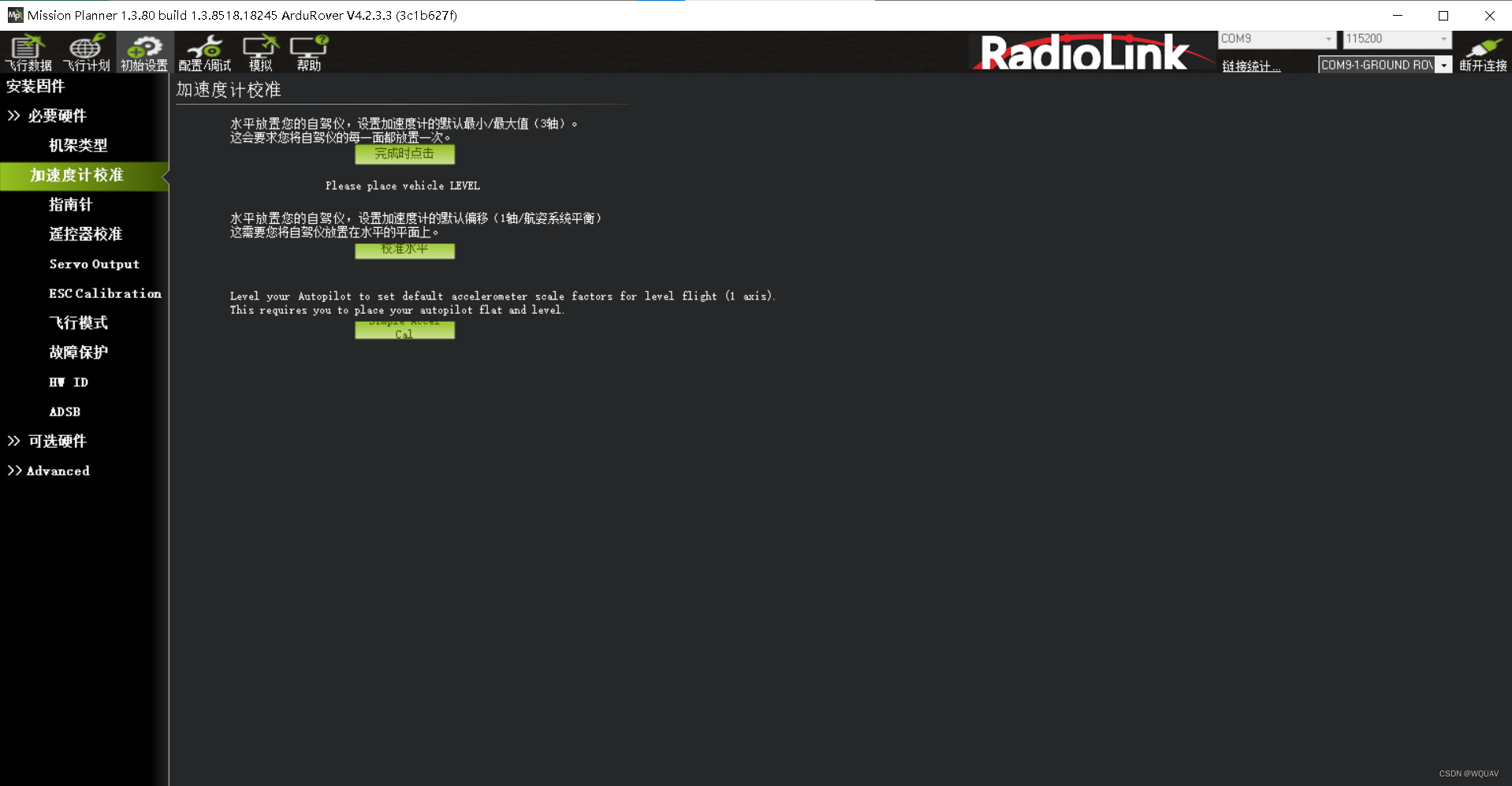
如果不出现提示,可能是没有插拔飞控板。需要在上一步后重新插拔连接。
上下前后左右全部校准一遍。
如果停滞,重新插拔。重启mission planner。死机的一种可能是联网操作软件后台发现更新包。
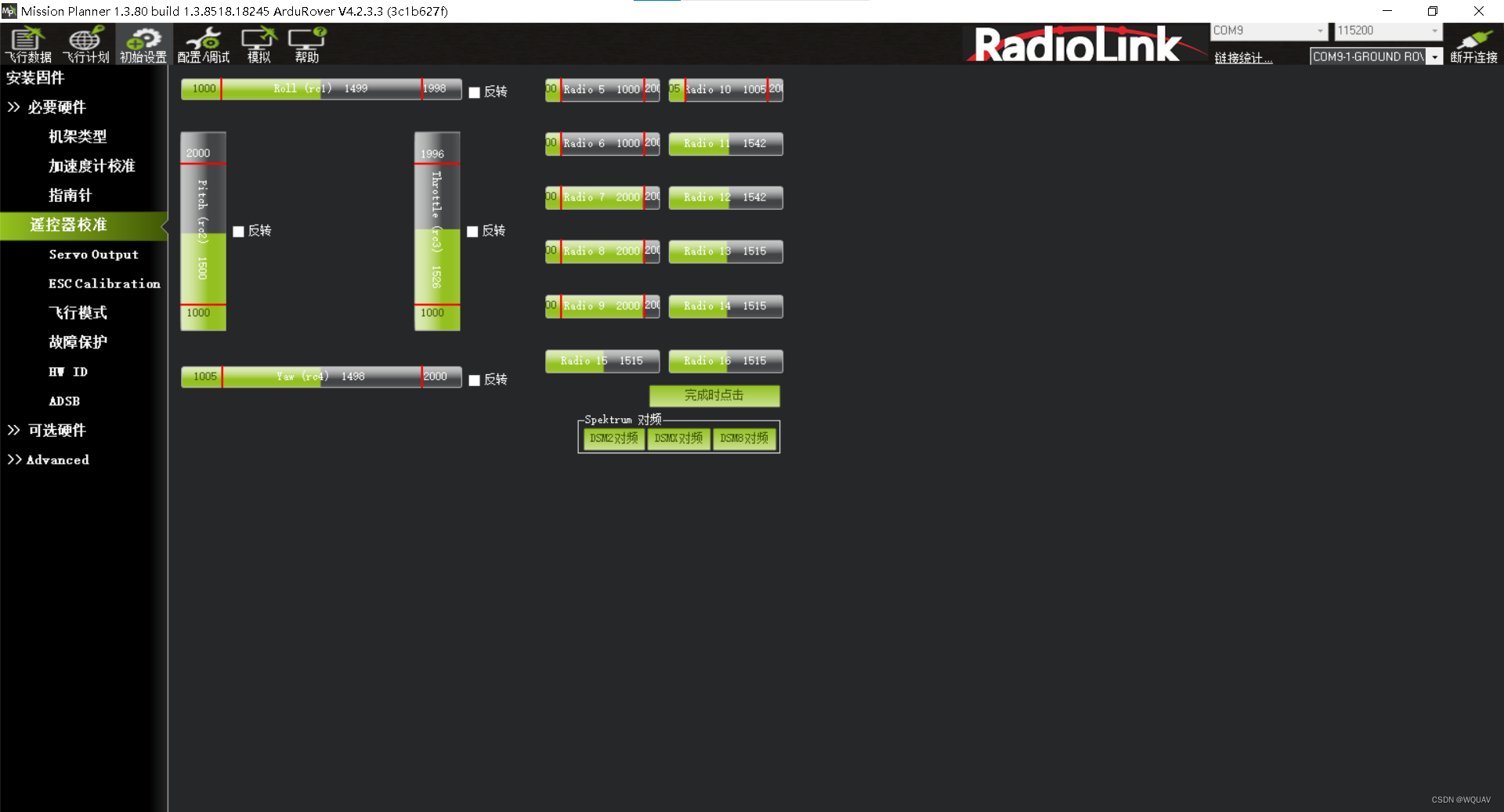
4.校准遥控器。

5.校准指南针。如果只有飞控,只能设置内置罗盘。
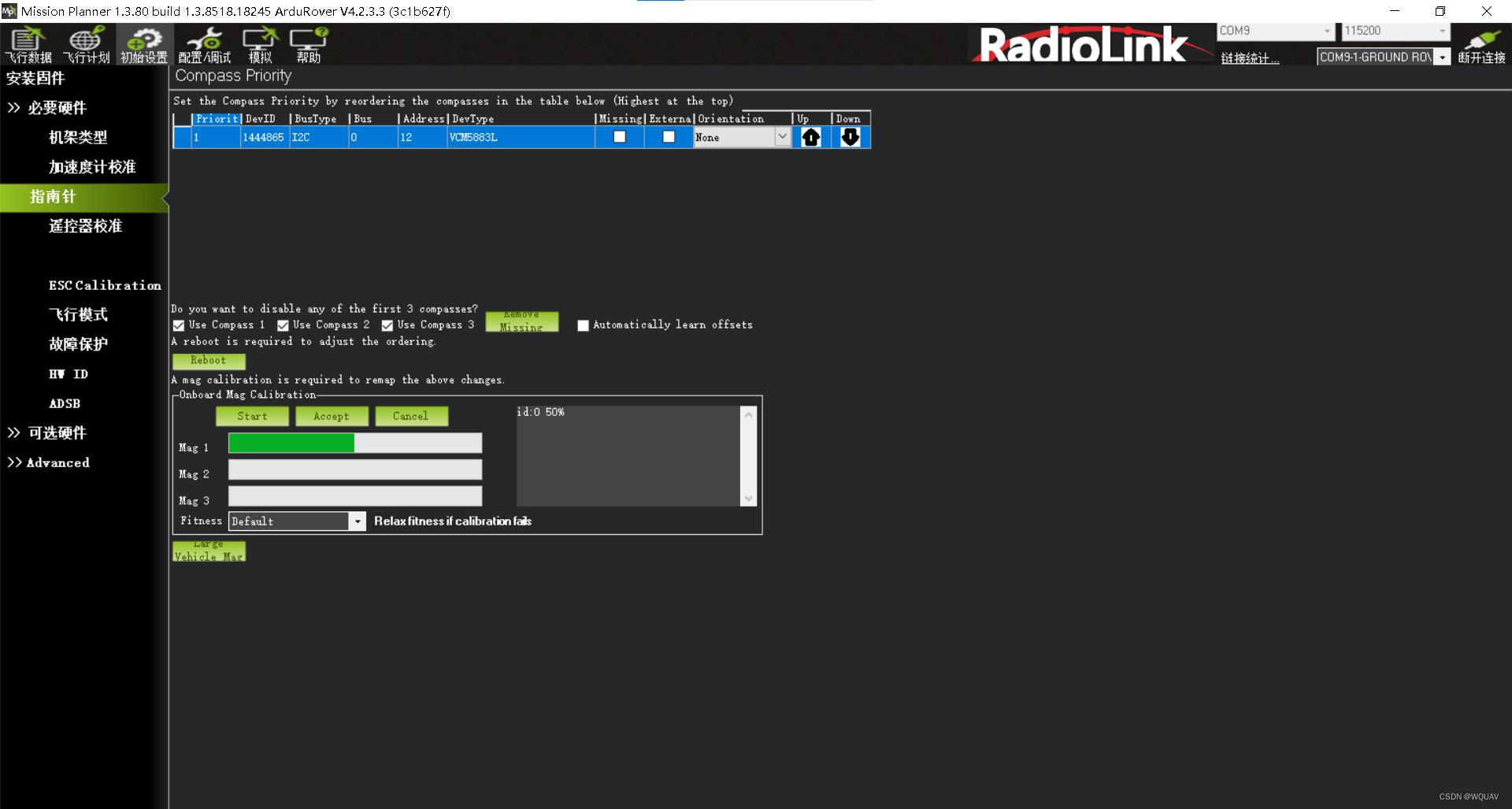
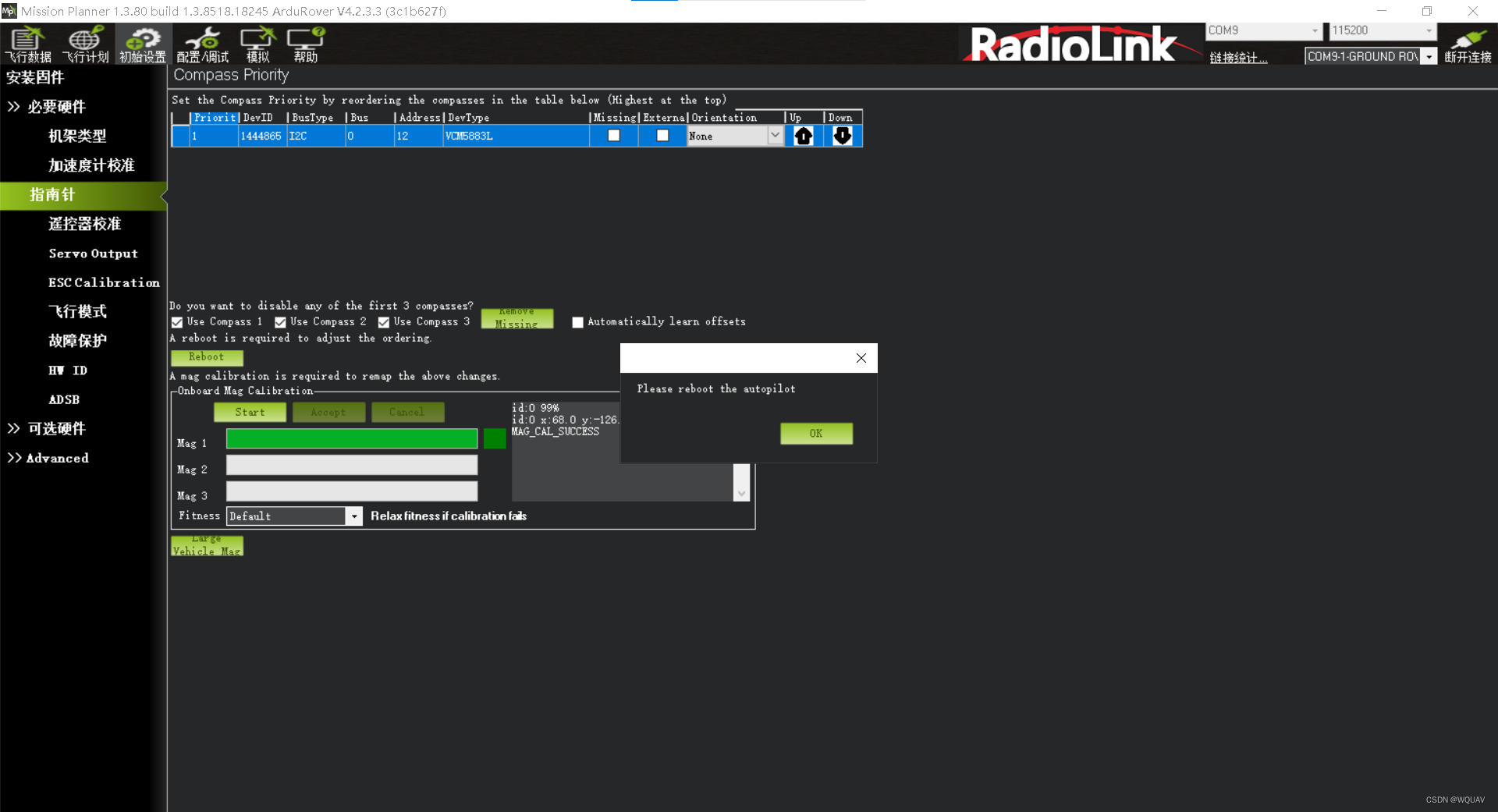
校准完毕重新插拔飞控。
6.遥控模式
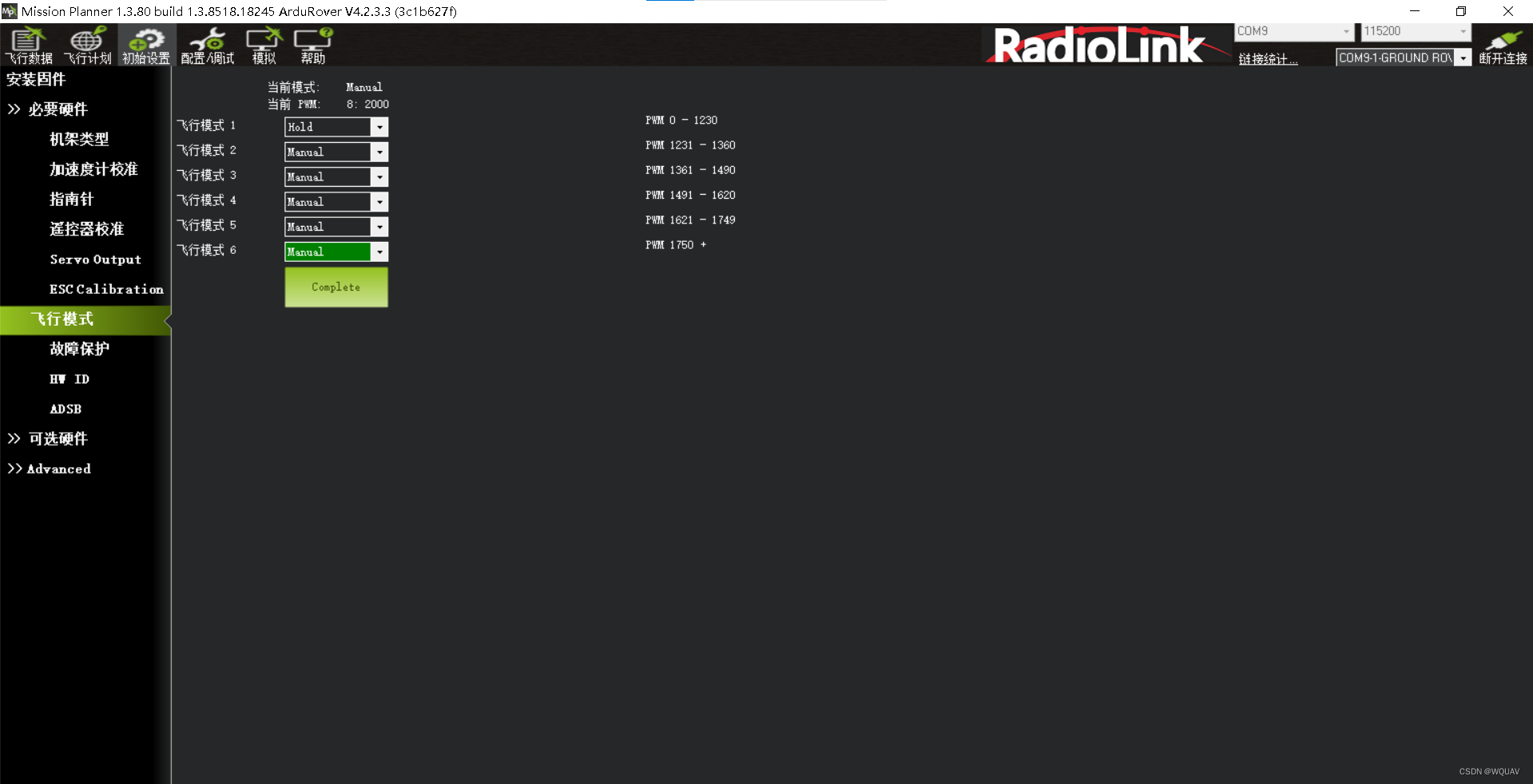
设置停机和手动模式。
以C波杆为例
当拨到最上方时为停机模式,可在遥控器设对应的名称。

当向下波动,两挡位均设为手动模式。这个根据需要进行设置。
注意在解锁时,应该在留待状态进行,以免右手通道摇杆打到底之后造成突然移动。
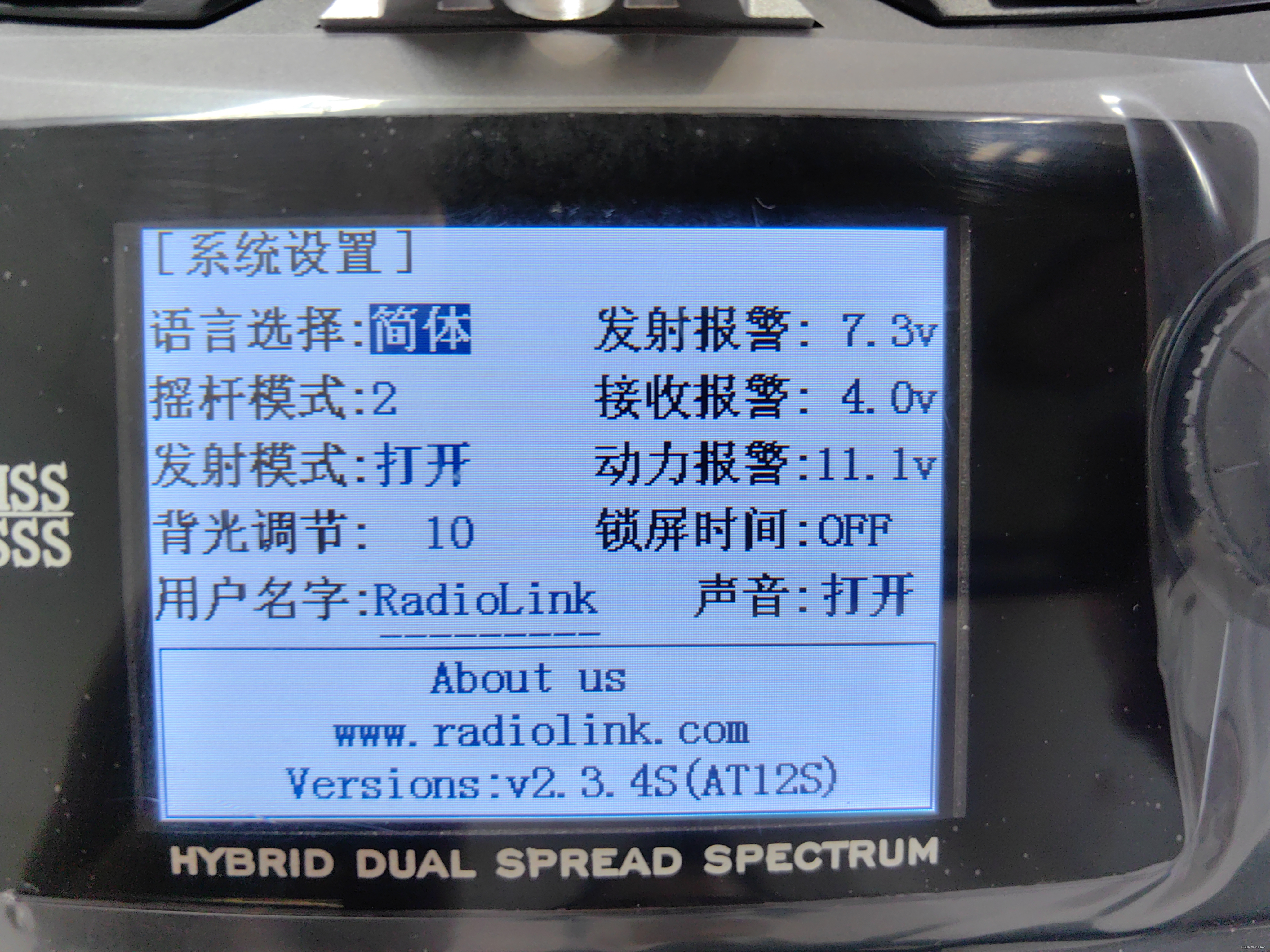
遥控器摇杆模式为2,其他设置详见下图。
 由于车速太快可能造成不必要的损坏,可设置油门舵机行程量。
由于车速太快可能造成不必要的损坏,可设置油门舵机行程量。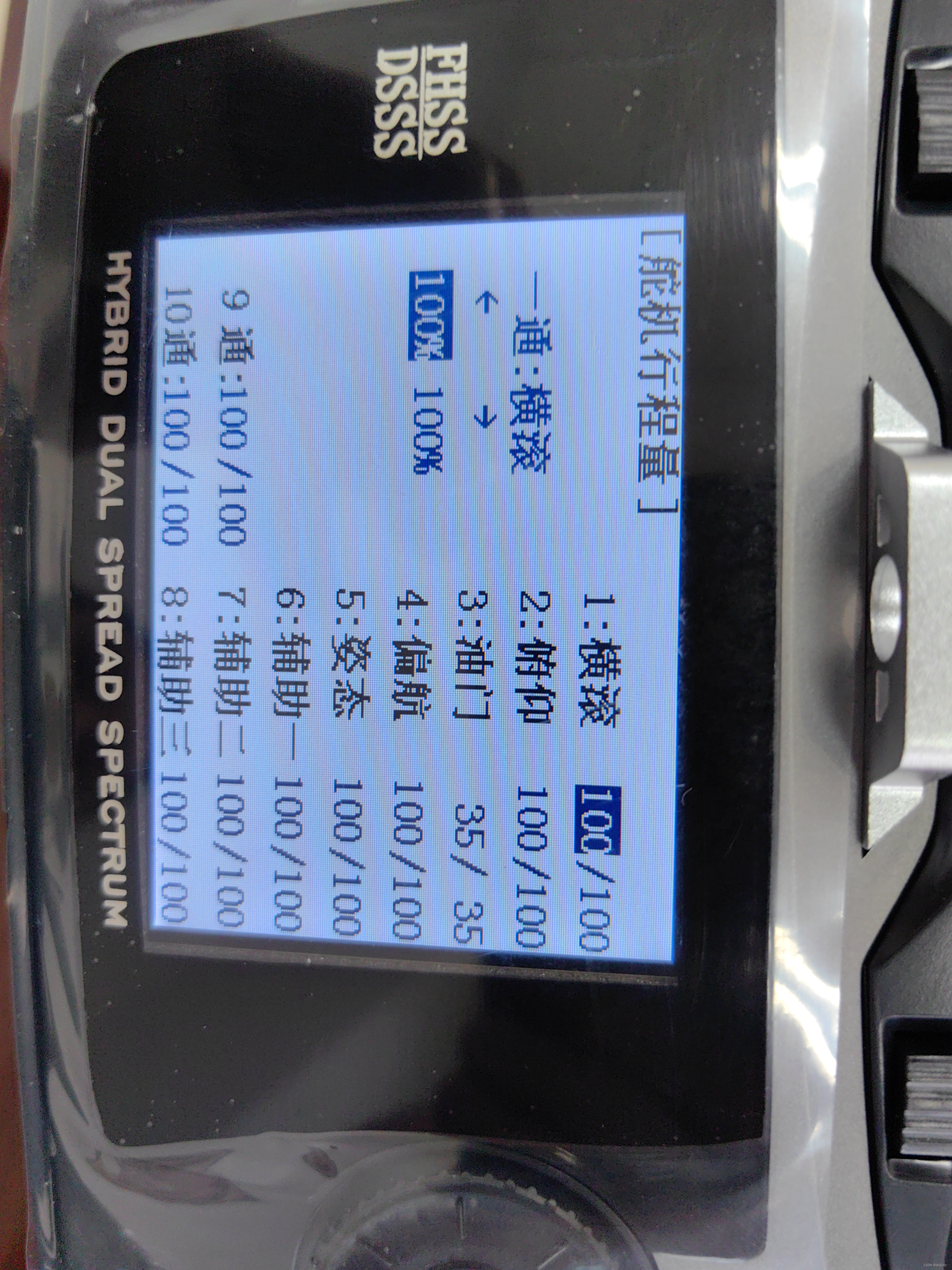
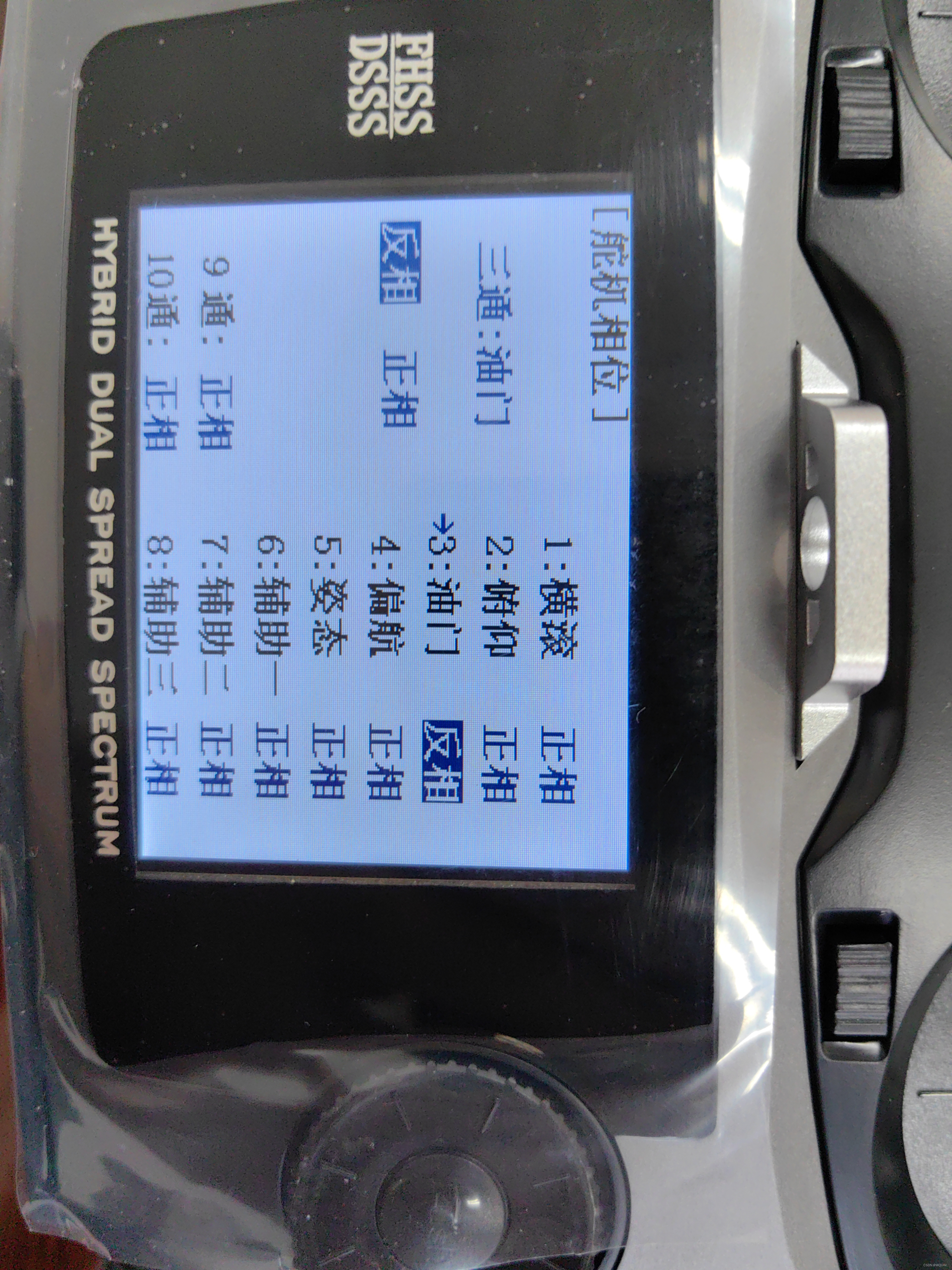
油门为反向。
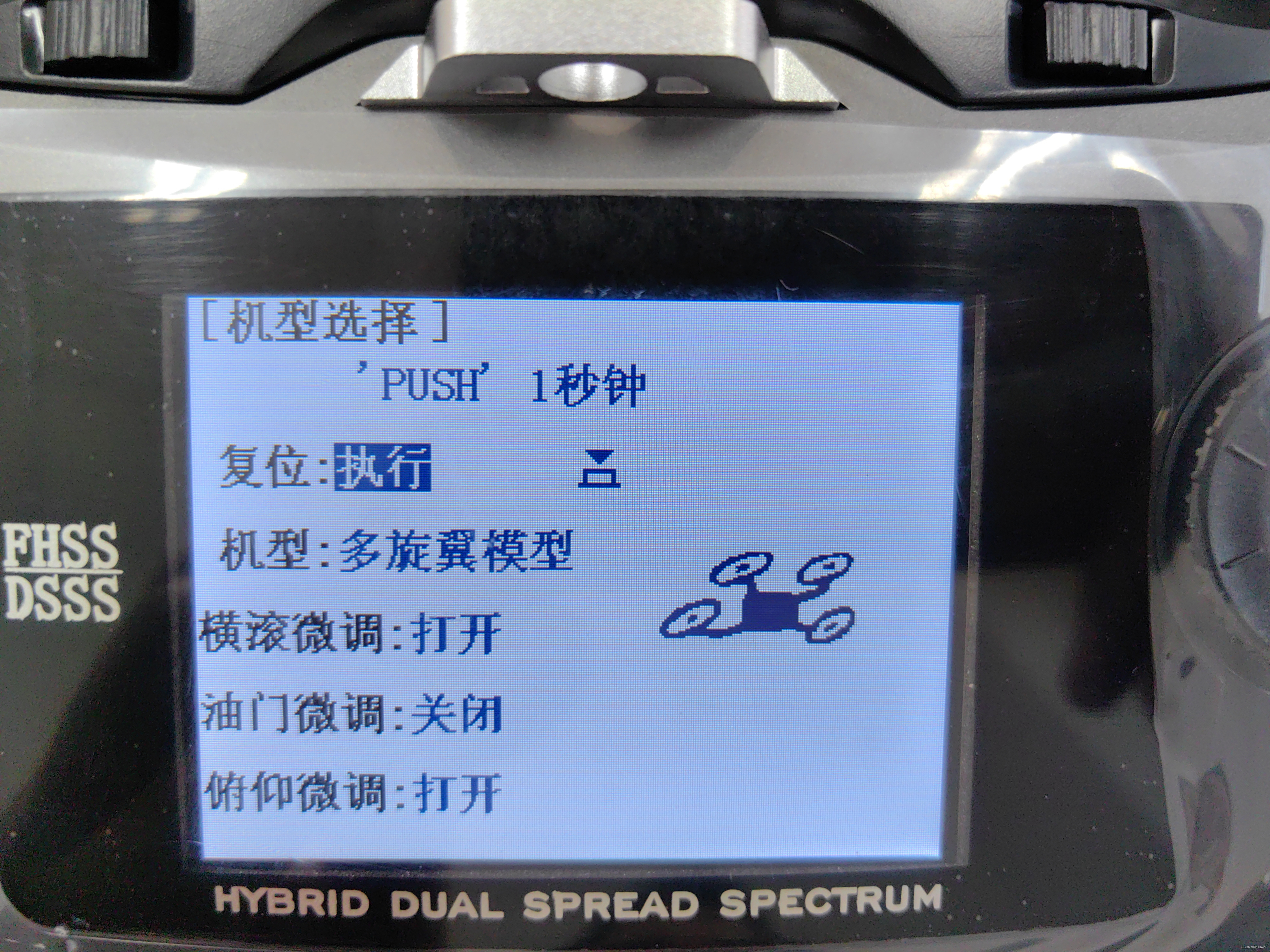
姿态选择在辅助通道进行设置。

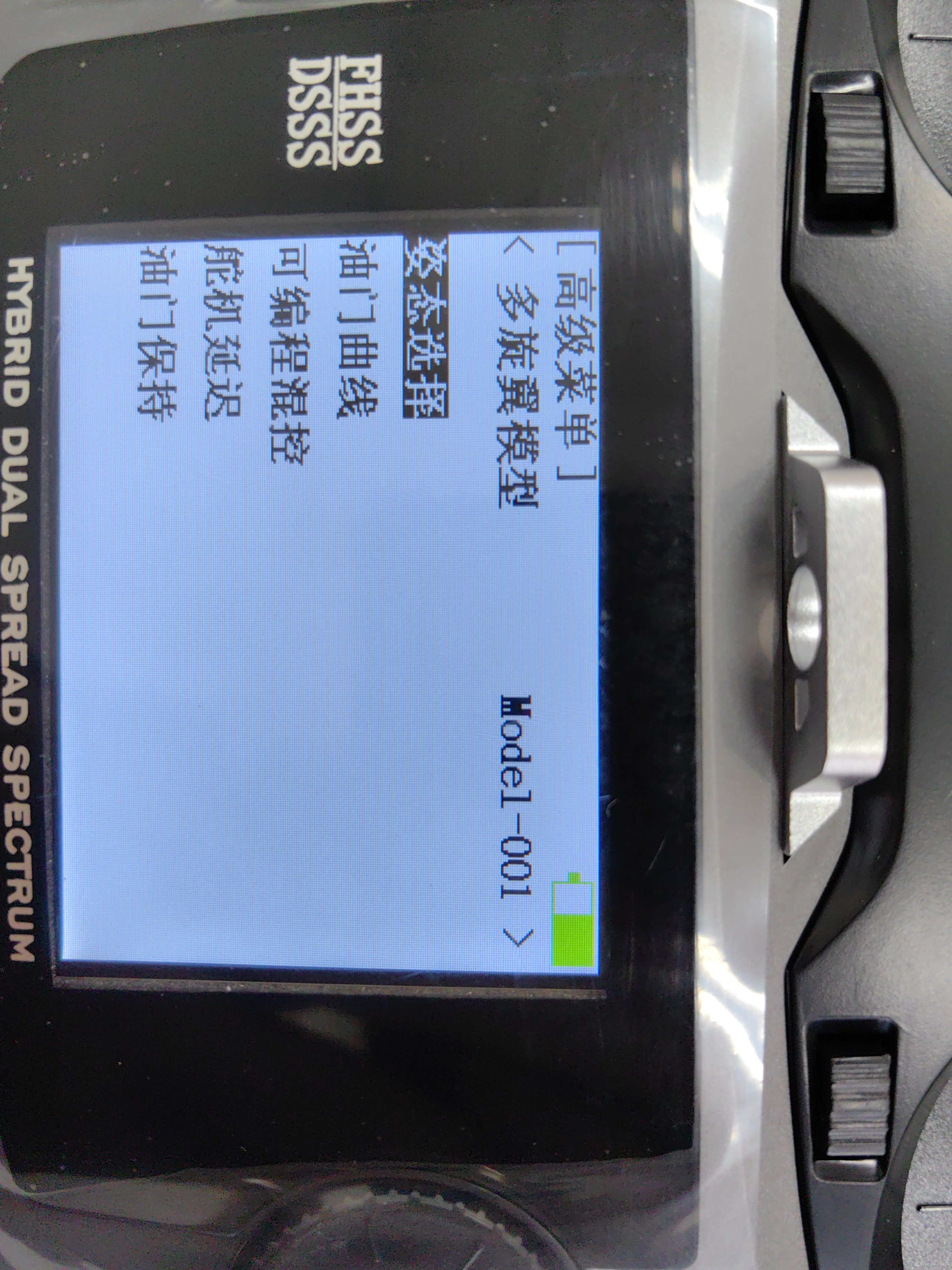
长按mode,再按一次进入高级菜单,姿态选择设置不同的名称。
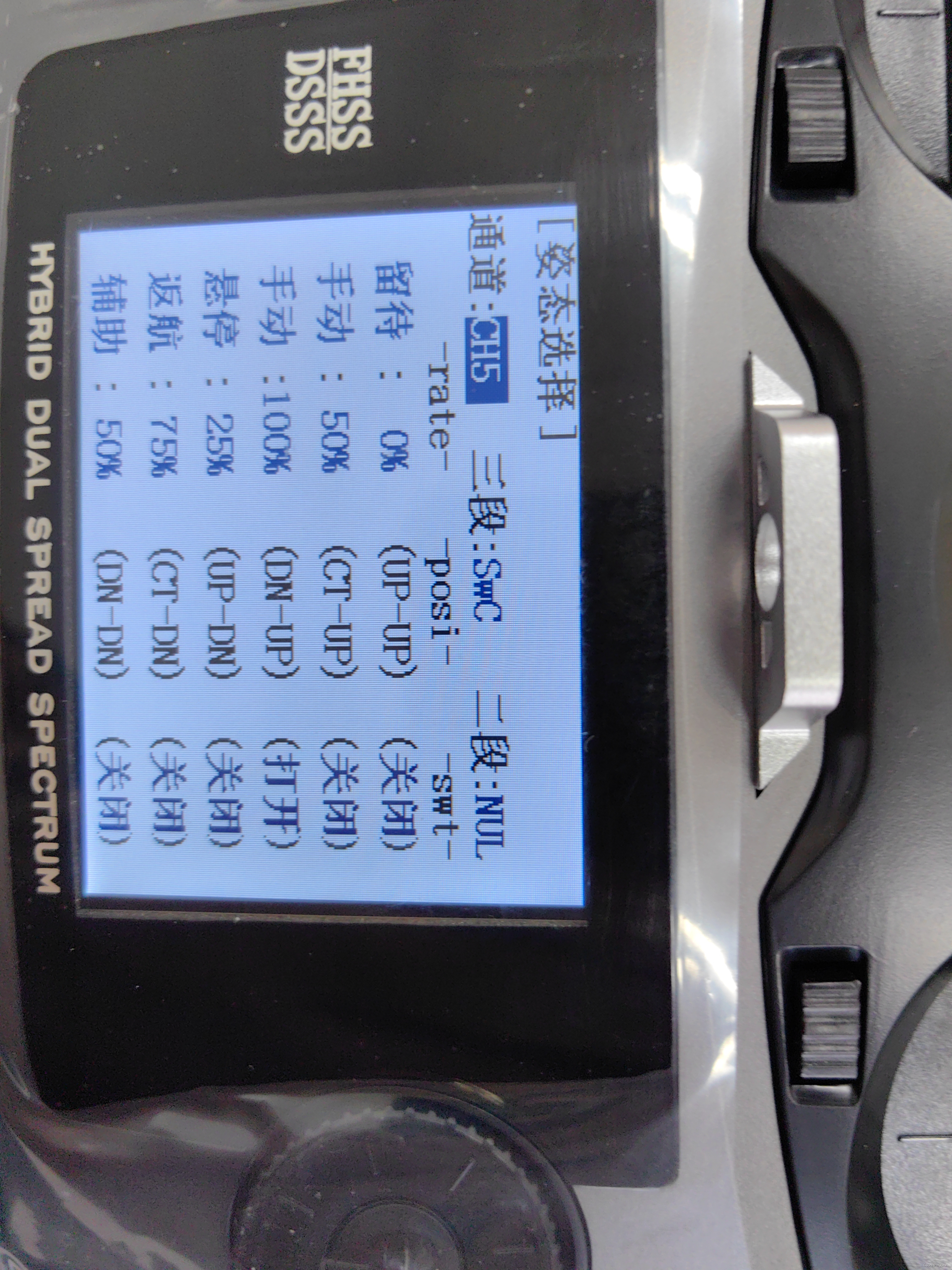 由于无人车在地面行驶,主要是在二维空间,没必要设置过多的操作模式,因此二段并没有设置。这里只用一个三档来进行操作。出现紧急情况,直接将拨杆拨到最上方无人车就会停在原地。
由于无人车在地面行驶,主要是在二维空间,没必要设置过多的操作模式,因此二段并没有设置。这里只用一个三档来进行操作。出现紧急情况,直接将拨杆拨到最上方无人车就会停在原地。
4.失控保护
设置遥控器的失控保护
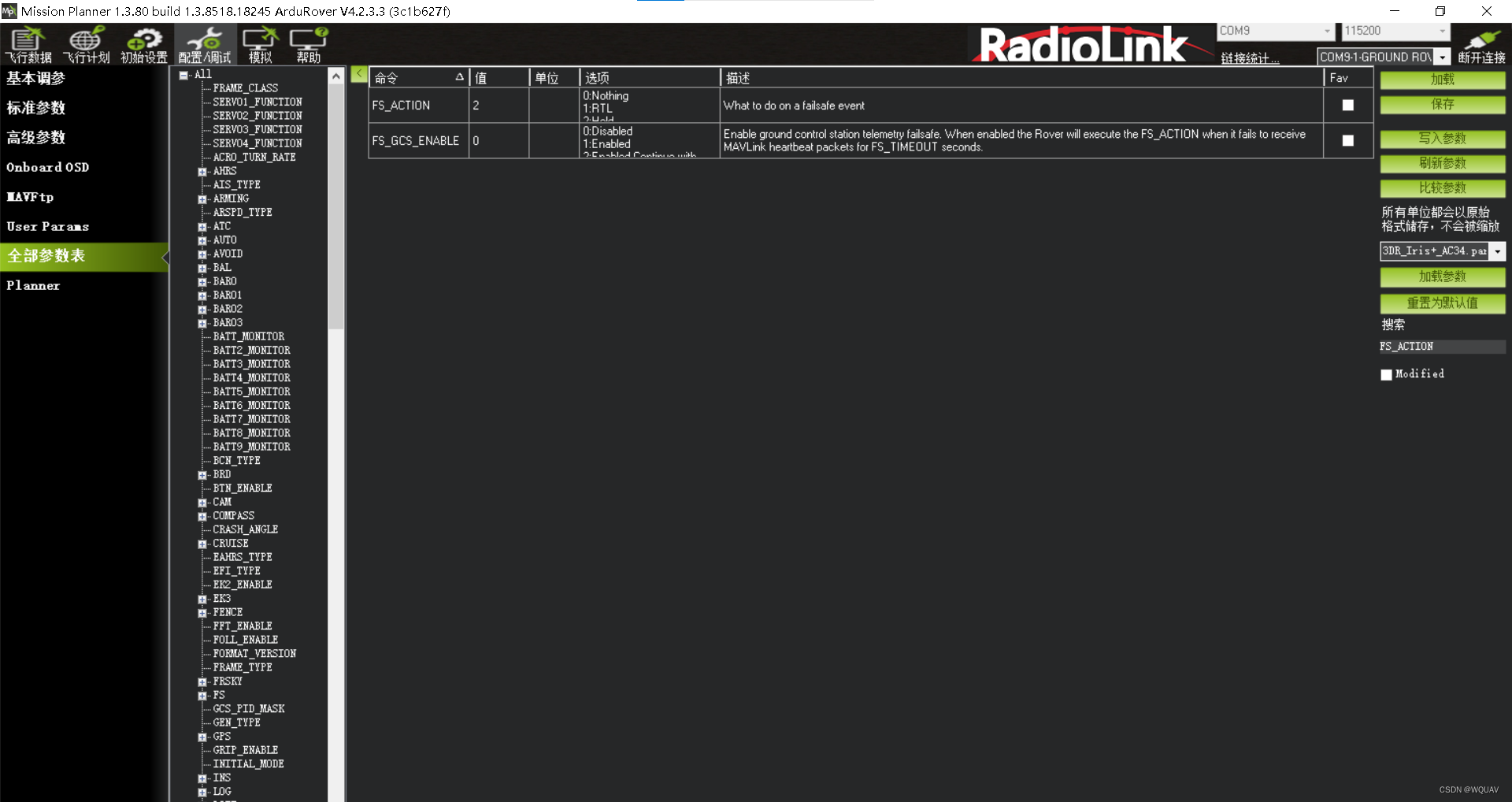
全部参数表,fs-action 值设置为停机模式。
5.地面站解锁
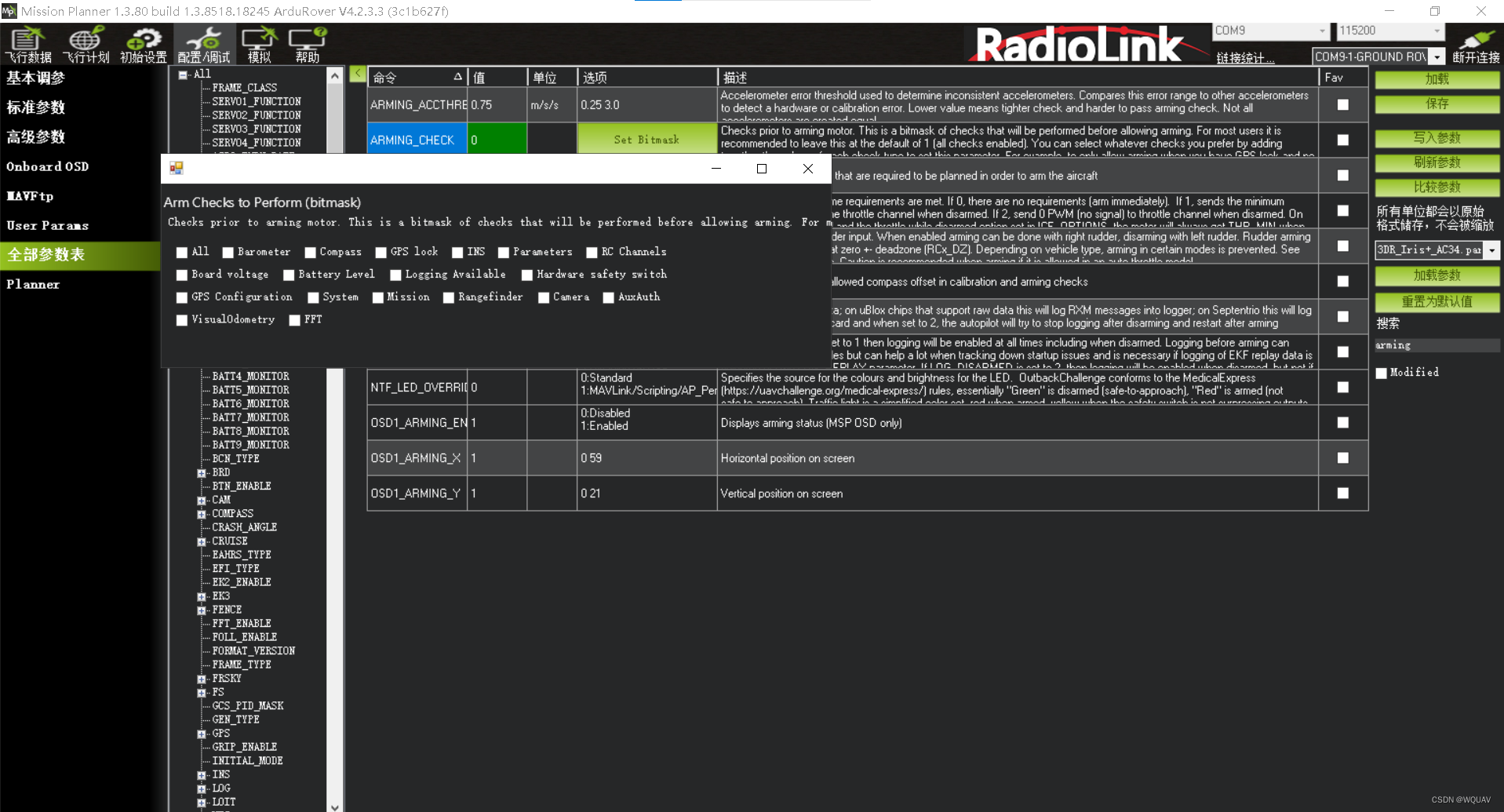 选择需要在解锁前需要检查的事项,默认为全部。可以手动修改,然后写入。
选择需要在解锁前需要检查的事项,默认为全部。可以手动修改,然后写入。

先开遥控器,再启动飞控,再启动美嘉欣动力电池,执行上图解锁飞控。
如果油门向后无反应,可以先微微向前启动信号传输再向后拉。
6.连接图示例
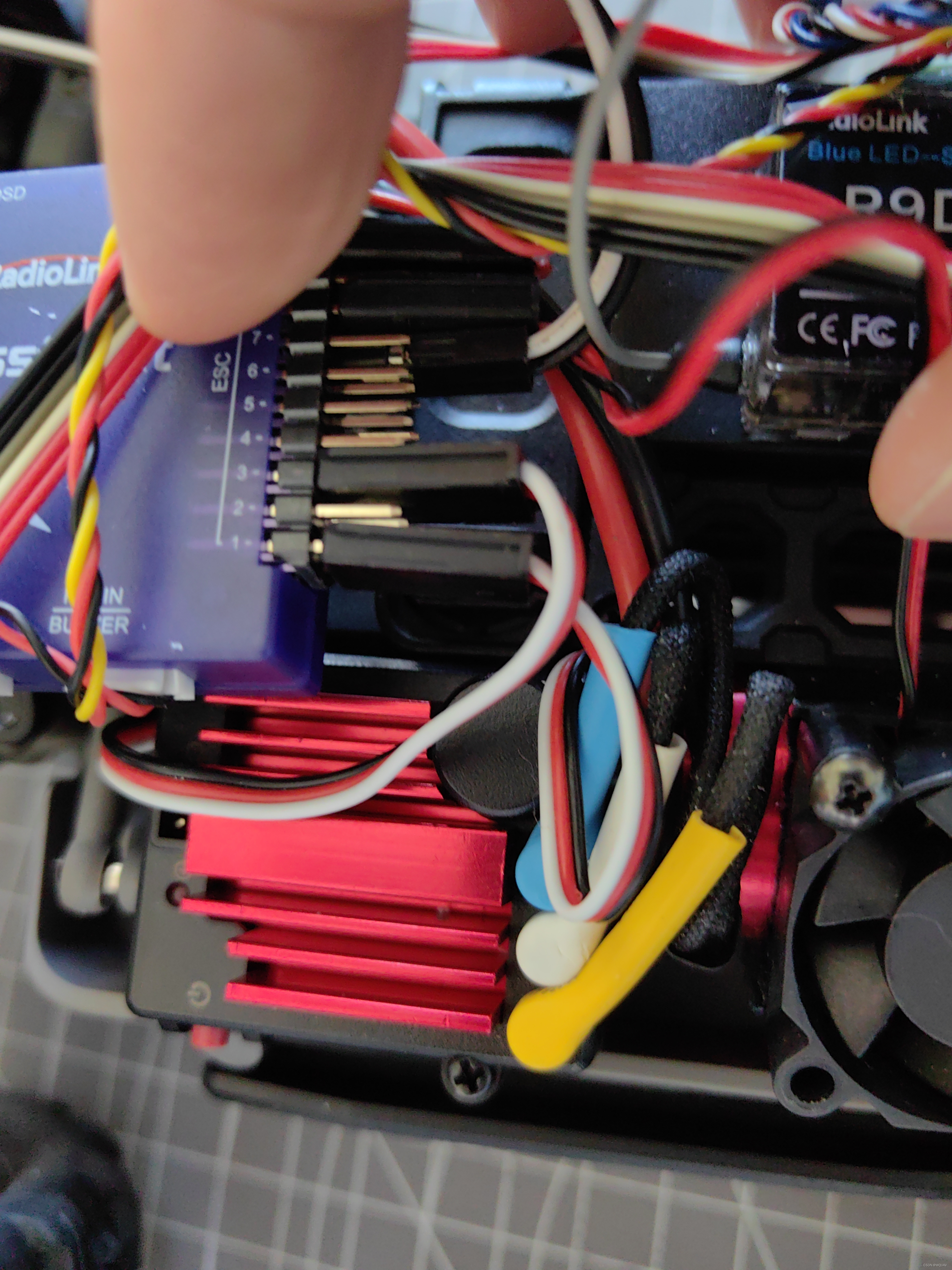
1.3通道如上图。
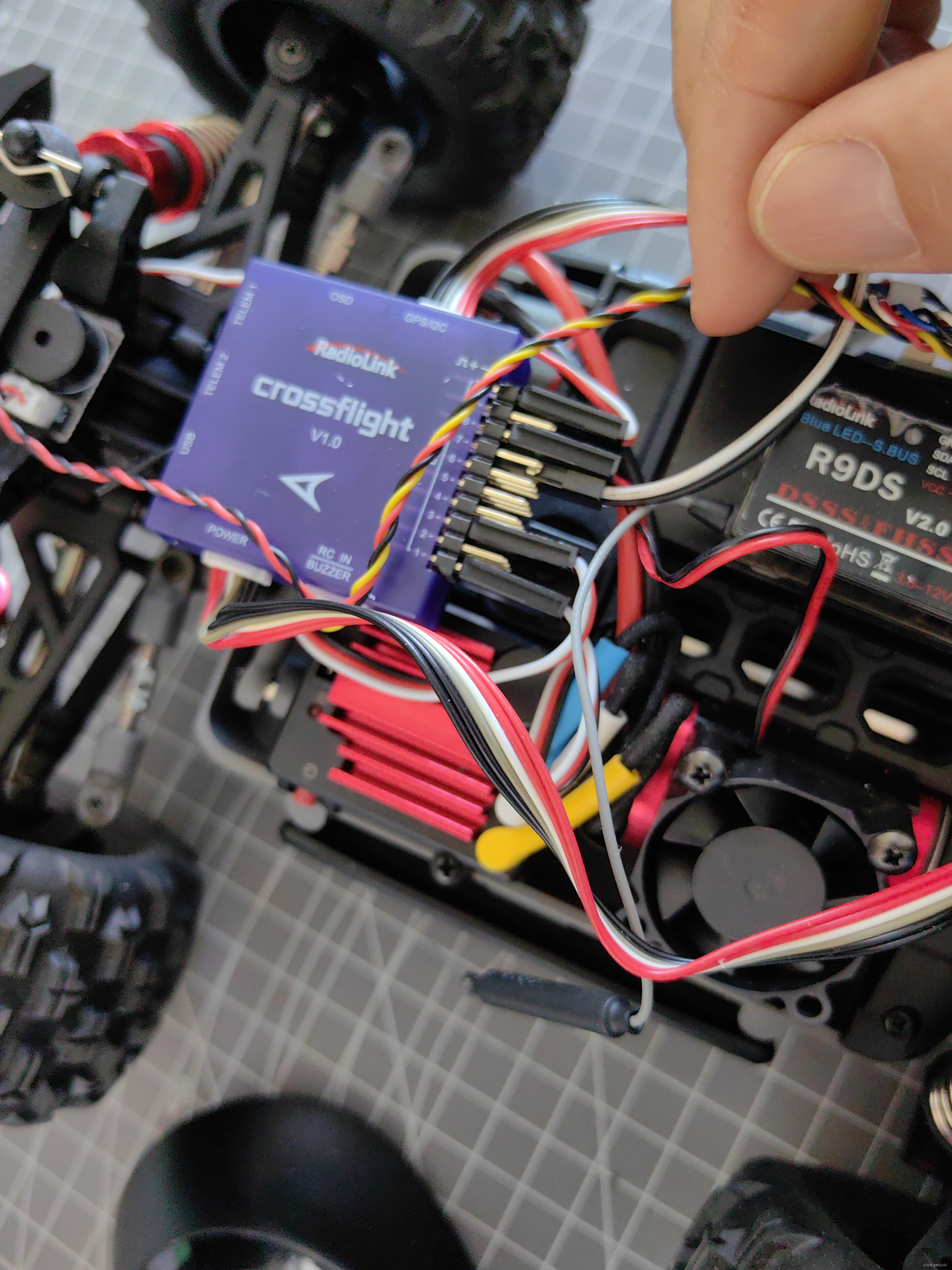
灯光,风扇连接飞控后面不用的通道。
5伏摄像头如果没有独立电源可以从飞控负极和正极取电,图中黑白杜邦线进行连接。但不建议这样连接。摄像头会非常烫,影响系统稳定,要注意防护。树脂会被摄像头烤化。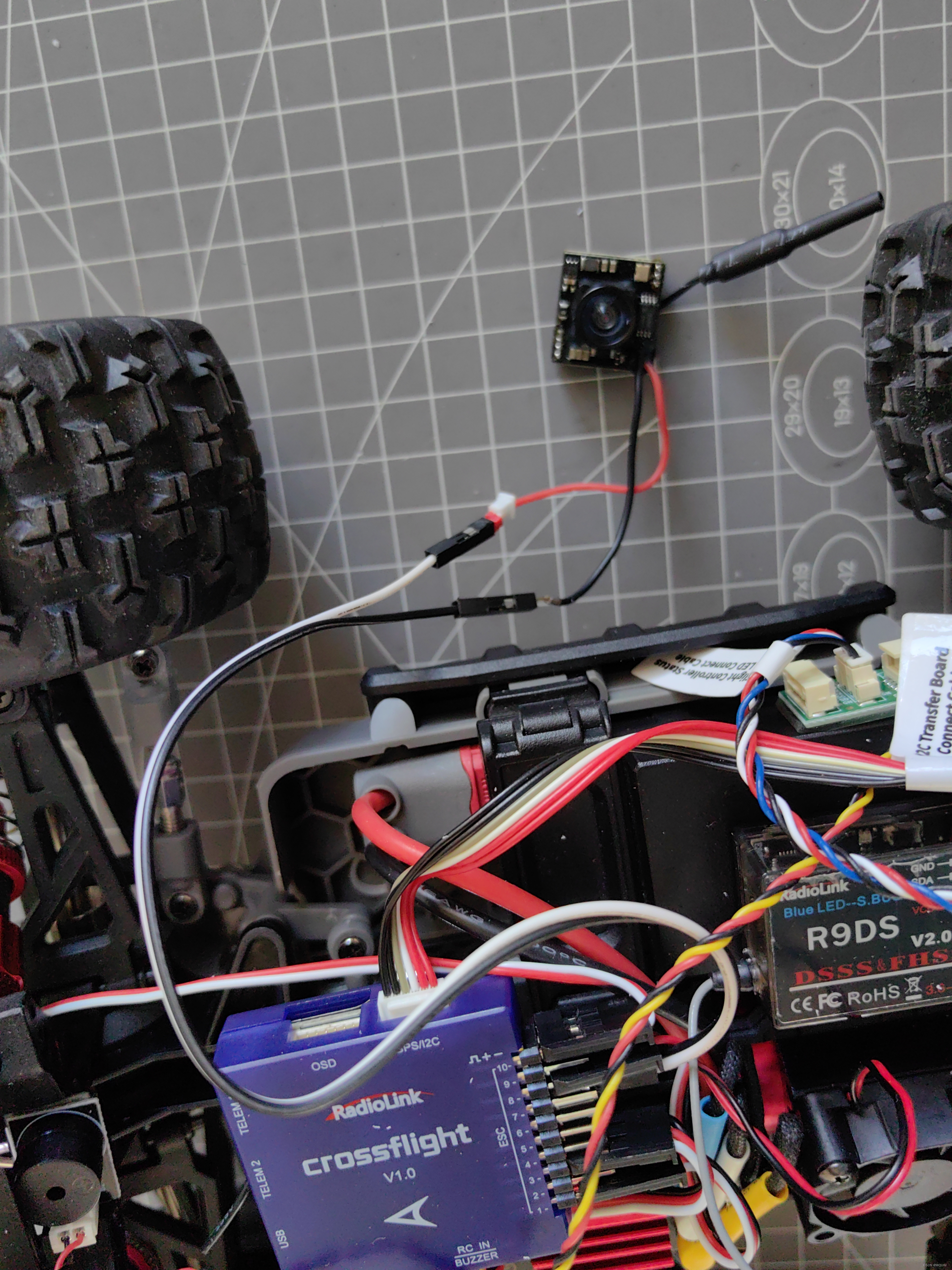
7.代码
ACRO_TURN_RATE,180
AHRS_COMP_BETA,0.1
AHRS_CUSTOM_PIT,0
AHRS_CUSTOM_ROLL,0
AHRS_CUSTOM_YAW,0
AHRS_EKF_TYPE,3
AHRS_GPS_GAIN,1
AHRS_GPS_MINSATS,6
AHRS_GPS_USE,1
AHRS_ORIENTATION,0
AHRS_RP_P,0.2
AHRS_TRIM_X,-0.006383711
AHRS_TRIM_Y,0.009225077
AHRS_TRIM_Z,0
AHRS_WIND_MAX,0
AHRS_YAW_P,0.2
AIS_TYPE,0
ARMING_ACCTHRESH,0.75
ARMING_CHECK,0
ARMING_MIS_ITEMS,0
ARMING_REQUIRE,1
ARMING_RUDDER,2
ARSPD_TYPE,0
ATC_ACCEL_MAX,1
ATC_BAL_D,0.03
ATC_BAL_FF,0
ATC_BAL_FLTD,0
ATC_BAL_FLTE,10
ATC_BAL_FLTT,0
ATC_BAL_I,1.5
ATC_BAL_IMAX,1
ATC_BAL_P,1.8
ATC_BAL_SMAX,0
ATC_BAL_SPD_FF,1
ATC_BRAKE,1
ATC_DECEL_MAX,0
ATC_SAIL_D,0
ATC_SAIL_FF,0
ATC_SAIL_FLTD,0
ATC_SAIL_FLTE,10
ATC_SAIL_FLTT,0
ATC_SAIL_I,0.1
ATC_SAIL_IMAX,1
ATC_SAIL_P,1
ATC_SAIL_SMAX,0
ATC_SPEED_D,0
ATC_SPEED_FF,0
ATC_SPEED_FLTD,0
ATC_SPEED_FLTE,10
ATC_SPEED_FLTT,0
ATC_SPEED_I,0.2
ATC_SPEED_IMAX,1
ATC_SPEED_P,0.2
ATC_SPEED_SMAX,0
ATC_STOP_SPEED,0.1
ATC_STR_ACC_MAX,120
ATC_STR_ANG_P,2
ATC_STR_RAT_D,0
ATC_STR_RAT_FF,0.2
ATC_STR_RAT_FLTD,0
ATC_STR_RAT_FLTE,10
ATC_STR_RAT_FLTT,0
ATC_STR_RAT_I,0.2
ATC_STR_RAT_IMAX,1
ATC_STR_RAT_MAX,120
ATC_STR_RAT_P,0.2
ATC_STR_RAT_SMAX,0
ATC_TURN_MAX_G,0.6
AUTO_KICKSTART,0
AUTO_TRIGGER_PIN,-1
AVOID_ACCEL_MAX,3
AVOID_BACKUP_DZ,0.1
AVOID_BACKUP_SPD,0.75
AVOID_ENABLE,3
AVOID_MARGIN,2
BAL_PITCH_MAX,2
BAL_PITCH_TRIM,0
BARO_ALT_OFFSET,0
BARO_EXT_BUS,-1
BARO_FLTR_RNG,0
BARO_GND_TEMP,0
BARO_PRIMARY,0
BARO_PROBE_EXT,0
BARO1_DEVID,656146
BARO1_GND_PRESS,101020.4
BARO1_WCF_ENABLE,0
BARO2_DEVID,0
BARO2_GND_PRESS,0
BARO2_WCF_ENABLE,0
BARO3_DEVID,0
BARO3_GND_PRESS,0
BARO3_WCF_ENABLE,0
BATT_MONITOR,0
BATT2_MONITOR,0
BATT3_MONITOR,0
BATT4_MONITOR,0
BATT5_MONITOR,0
BATT6_MONITOR,0
BATT7_MONITOR,0
BATT8_MONITOR,0
BATT9_MONITOR,0
BCN_TYPE,0
BRD_BOOT_DELAY,0
BRD_OPTIONS,1
BRD_RTC_TYPES,1
BRD_RTC_TZ_MIN,0
BRD_SAFETY_MASK,0
BRD_SAFETYENABLE,0
BRD_SAFETYOPTION,3
BRD_SD_SLOWDOWN,0
BRD_SER2_RTSCTS,2
BRD_SERIAL_NUM,0
BRD_VBUS_MIN,4.3
BTN_ENABLE,0
CAM_AUTO_ONLY,0
CAM_DURATION,10
CAM_FEEDBACK_PIN,-1
CAM_FEEDBACK_POL,1
CAM_MAX_ROLL,0
CAM_MIN_INTERVAL,0
CAM_RC_TYPE,0
CAM_RELAY_ON,1
CAM_SERVO_OFF,1100
CAM_SERVO_ON,1300
CAM_TRIGG_DIST,0
CAM_TRIGG_TYPE,0
CAM_TYPE,0
COMPASS_AUTO_ROT,2
COMPASS_AUTODEC,1
COMPASS_CAL_FIT,16
COMPASS_CUS_PIT,0
COMPASS_CUS_ROLL,0
COMPASS_CUS_YAW,0
COMPASS_DEC,0
COMPASS_DEV_ID,1444865
COMPASS_DEV_ID2,0
COMPASS_DEV_ID3,0
COMPASS_DEV_ID4,0
COMPASS_DEV_ID5,0
COMPASS_DEV_ID6,0
COMPASS_DEV_ID7,0
COMPASS_DEV_ID8,0
COMPASS_DIA_X,1
COMPASS_DIA_Y,1
COMPASS_DIA_Z,1
COMPASS_DIA2_X,0
COMPASS_DIA2_Y,0
COMPASS_DIA2_Z,0
COMPASS_DIA3_X,0
COMPASS_DIA3_Y,0
COMPASS_DIA3_Z,0
COMPASS_ENABLE,1
COMPASS_EXTERN2,0
COMPASS_EXTERN3,0
COMPASS_EXTERNAL,0
COMPASS_FLTR_RNG,0
COMPASS_LEARN,0
COMPASS_MOT_X,0
COMPASS_MOT_Y,0
COMPASS_MOT_Z,0
COMPASS_MOT2_X,0
COMPASS_MOT2_Y,0
COMPASS_MOT2_Z,0
COMPASS_MOT3_X,0
COMPASS_MOT3_Y,0
COMPASS_MOT3_Z,0
COMPASS_MOTCT,0
COMPASS_ODI_X,0
COMPASS_ODI_Y,0
COMPASS_ODI_Z,0
COMPASS_ODI2_X,0
COMPASS_ODI2_Y,0
COMPASS_ODI2_Z,0
COMPASS_ODI3_X,0
COMPASS_ODI3_Y,0
COMPASS_ODI3_Z,0
COMPASS_OFFS_MAX,1800
COMPASS_OFS_X,68.00813
COMPASS_OFS_Y,-126.8833
COMPASS_OFS_Z,73.80984
COMPASS_OFS2_X,0
COMPASS_OFS2_Y,0
COMPASS_OFS2_Z,0
COMPASS_OFS3_X,0
COMPASS_OFS3_Y,0
COMPASS_OFS3_Z,0
COMPASS_OPTIONS,0
COMPASS_ORIENT,0
COMPASS_ORIENT2,0
COMPASS_ORIENT3,0
COMPASS_PMOT_EN,0
COMPASS_PRIO1_ID,1444865
COMPASS_PRIO2_ID,0
COMPASS_PRIO3_ID,0
COMPASS_SCALE,0
COMPASS_SCALE2,0
COMPASS_SCALE3,0
COMPASS_TYPEMASK,0
COMPASS_USE,1
COMPASS_USE2,1
COMPASS_USE3,1
CRASH_ANGLE,0
CRUISE_SPEED,2
CRUISE_THROTTLE,50
EAHRS_TYPE,0
EFI_TYPE,0
EK2_ENABLE,0
EK3_ABIAS_P_NSE,0.003
EK3_ACC_BIAS_LIM,1
EK3_ACC_P_NSE,0.35
EK3_AFFINITY,0
EK3_ALT_M_NSE,2
EK3_BCN_DELAY,50
EK3_BCN_I_GTE,500
EK3_BCN_M_NSE,1
EK3_BETA_MASK,0
EK3_CHECK_SCALE,100
EK3_DRAG_BCOEF_X,0
EK3_DRAG_BCOEF_Y,0
EK3_DRAG_M_NSE,0.5
EK3_DRAG_MCOEF,0
EK3_EAS_I_GATE,400
EK3_EAS_M_NSE,1.4
EK3_ENABLE,1
EK3_ERR_THRESH,0.2
EK3_FLOW_DELAY,10
EK3_FLOW_I_GATE,300
EK3_FLOW_M_NSE,0.25
EK3_FLOW_USE,1
EK3_GBIAS_P_NSE,0.001
EK3_GLITCH_RAD,25
EK3_GND_EFF_DZ,4
EK3_GPS_CHECK,31
EK3_GSF_RST_MAX,2
EK3_GSF_RUN_MASK,3
EK3_GSF_USE_MASK,3
EK3_GYRO_P_NSE,0.015
EK3_HGT_DELAY,60
EK3_HGT_I_GATE,500
EK3_HRT_FILT,2
EK3_IMU_MASK,1
EK3_MAG_CAL,2
EK3_MAG_EF_LIM,50
EK3_MAG_I_GATE,300
EK3_MAG_M_NSE,0.05
EK3_MAG_MASK,0
EK3_MAGB_P_NSE,0.0001
EK3_MAGE_P_NSE,0.001
EK3_MAX_FLOW,2.5
EK3_NOAID_M_NSE,10
EK3_OGN_HGT_MASK,0
EK3_OGNM_TEST_SF,2
EK3_POS_I_GATE,500
EK3_POSNE_M_NSE,0.5
EK3_PRIMARY,0
EK3_RNG_I_GATE,500
EK3_RNG_M_NSE,0.5
EK3_RNG_USE_HGT,-1
EK3_RNG_USE_SPD,2
EK3_SRC_OPTIONS,1
EK3_SRC1_POSXY,3
EK3_SRC1_POSZ,1
EK3_SRC1_VELXY,3
EK3_SRC1_VELZ,3
E 最低0.47元/天 解锁文章
最低0.47元/天 解锁文章


















 5544
5544

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









