






文章目录
序言
当你因为看到CUADC字样而点进这篇帖子,那么恭喜你,鉴定你为CUADC苦命人,如果布吉岛什么是CUADC(中国大学生飞行器创新设计大赛),好了你现在知道了,本着模友一家人的开源精神,写下这篇帖子,为大家分享一下踩过的坑,祝各位比赛顺利!
Px4其实对固定翼的支持没有那么高,但是就是有犟种非要用这个固件调固定翼,像我一样,那你是来对了奥。
提示:请规范操作,首先保障自己的安全!
同时要注意,装机不在本文讨论范围之内,但注意,飞控要加装减震座,注意飞控箭头安装方向,舵角有没有安装牢固,摇臂有没有与舵角平行,摇臂螺丝拧没拧,快调有没有拧紧,螺丝有没有固定牢固,没有自紧螺母就点502吧,还有你天线有没有装紧,建议分动力电和设备电,不然你轰油门,电池压降,飞控关机爽死你,就因为这个我炸了两架飞机……
01-固件刷写
固件,首先qgc先到固件界面,然后插飞控数据线,然后他蹦出来固件选择,选px4就ok了。
提示:不要在升级的时候拔数据线,不然就准备换新吧。
02-基本设置
提示:首先要注意,在准备飞行前,所有的地面测试一定要取掉螺旋桨!。
2.1机架设置
机架,你是常规布局就选常规布局,是v尾就选v尾。
2.2传感器校准以及设置
指南针、加速度计、地平线
根据地面站提示完成设置即可,每个传感器校准完成后需要重启飞控。
空速计
空速计对于固定翼来讲非常关键,仅依靠gps位移和加速度计对时间积分的方法并不准确,比如我设置15m/s,不插空速计他自己能干到27m/s,嘎嘎快,所以朋友们要插空速计。
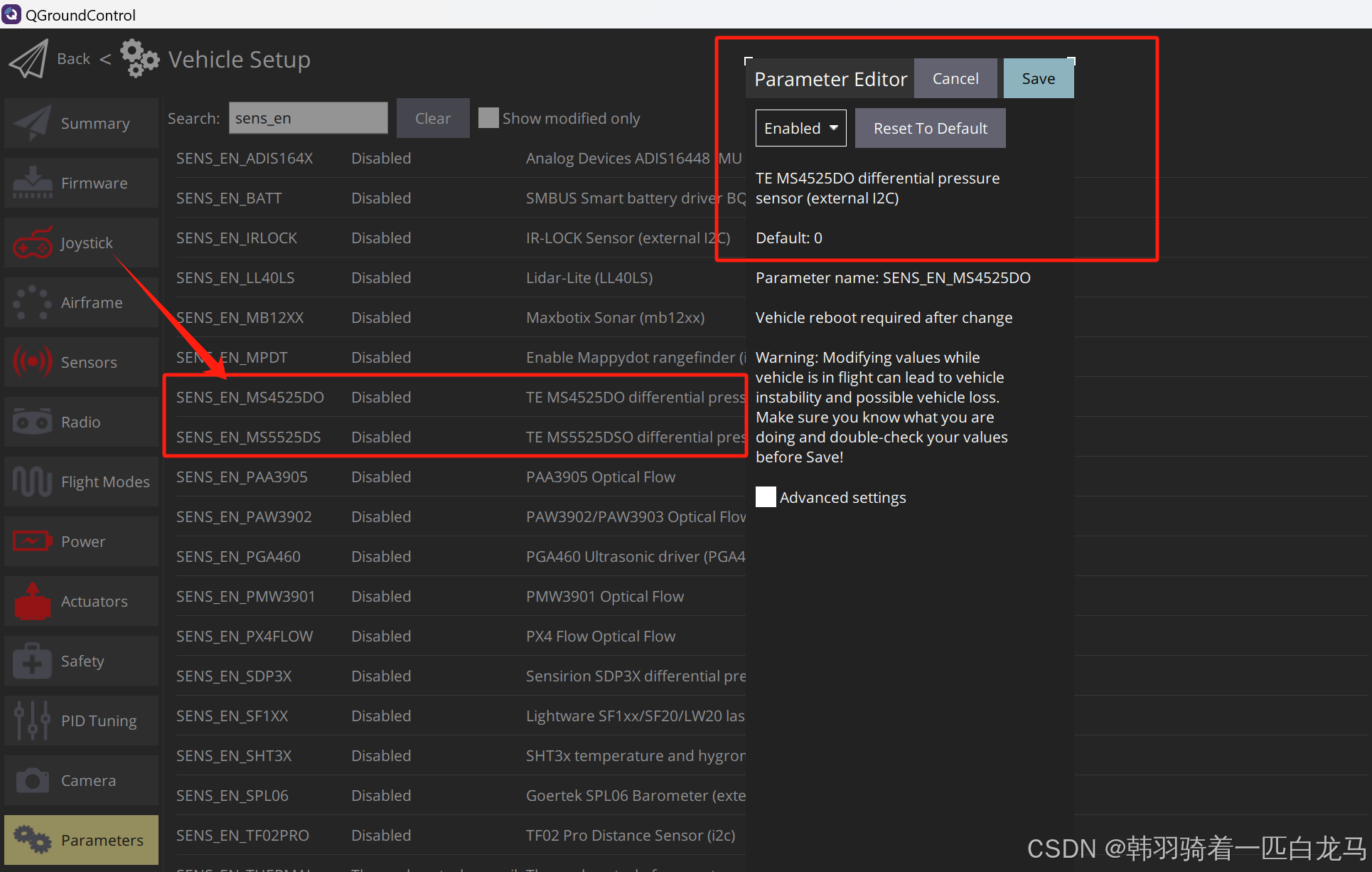
我使用的空速计为MS4525D主控,将空速计插在I2C接口上,在参数列表里选择如下参数:SENS_EN_MS4525DO并修改参数为Enabled。如果你是别的主控你就选其他的参数,建议在购买空速计之前查看好固件支持的型号。
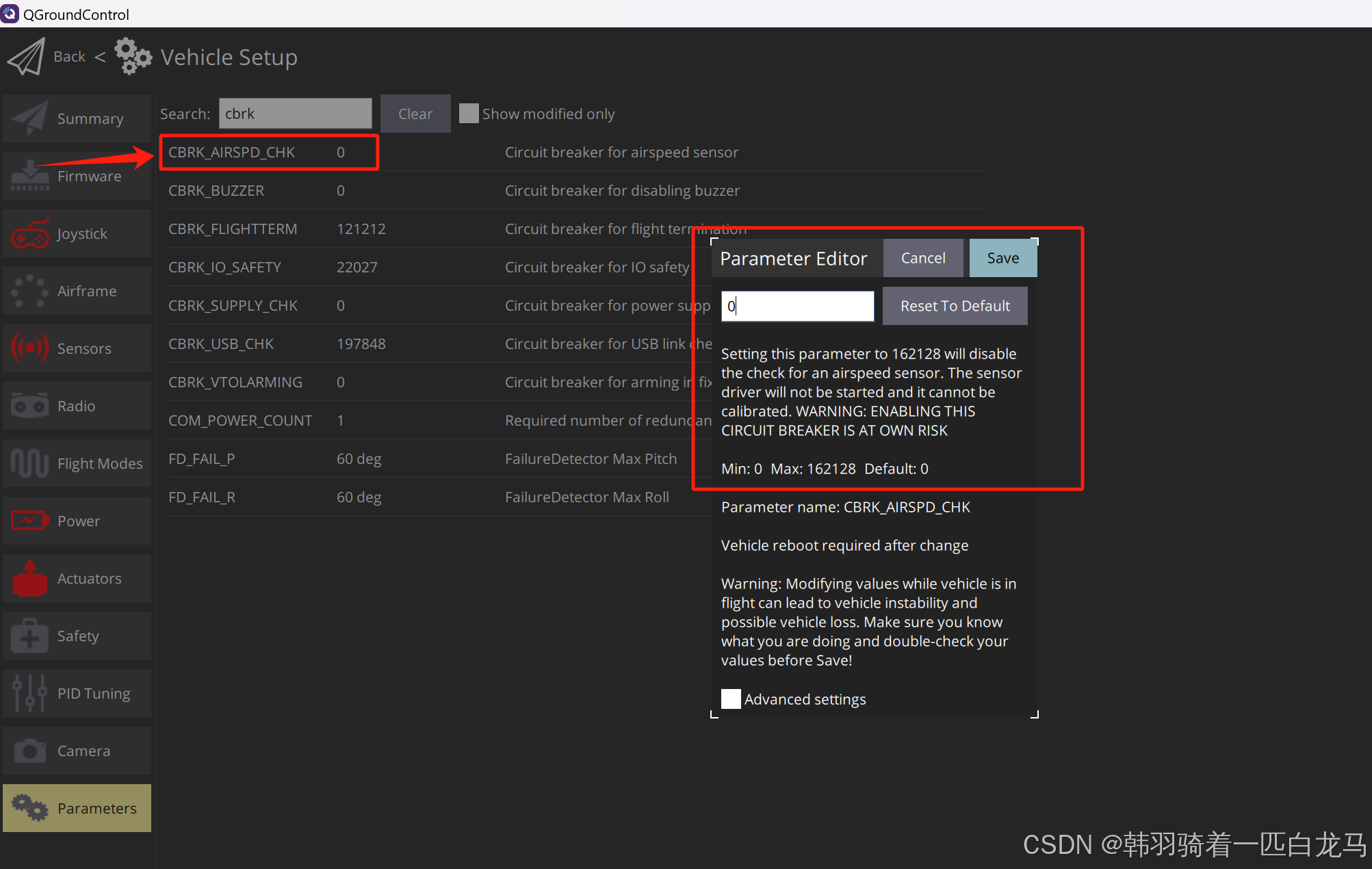
同时保证安全检查参数CBRK_AIRSPD_CHK的参数为0,如果输入162128则视为关闭空速计。
提示:注意空速管清洁无堵塞!!!!!
然后在传感器校准页面根据提示校准空速,首先静风,然后使劲吹,吹到他要求的气压。如果失败就是你吹得不够或者吹太大了。
2.3遥控器校准
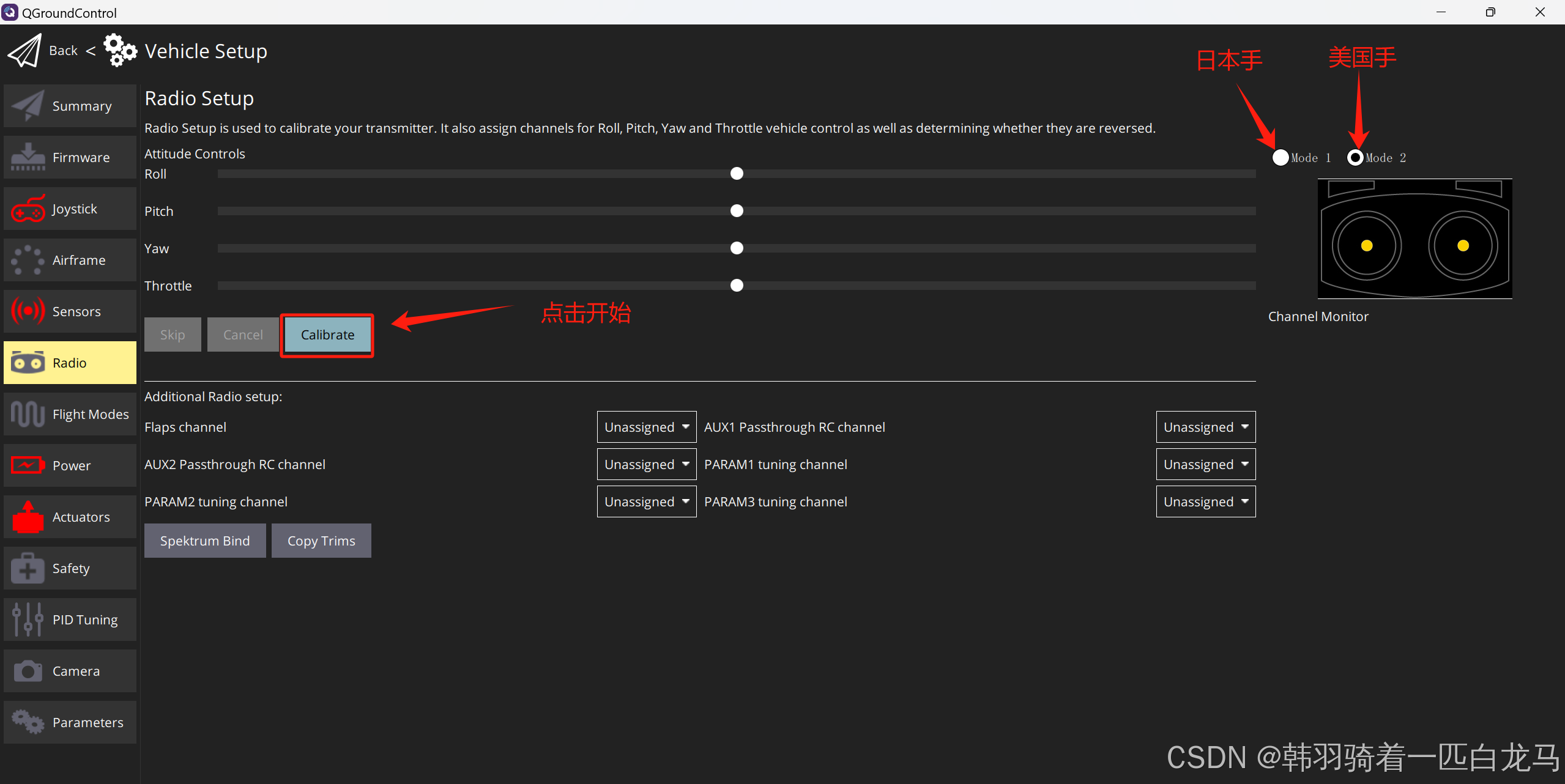
在将接收机使用S.BUS连接上飞控以后,进行遥控器校准,选择日本/美国手,然后点击开始,跟随引导一步步做对应的动作,识别遥控器。
2.4飞行模式
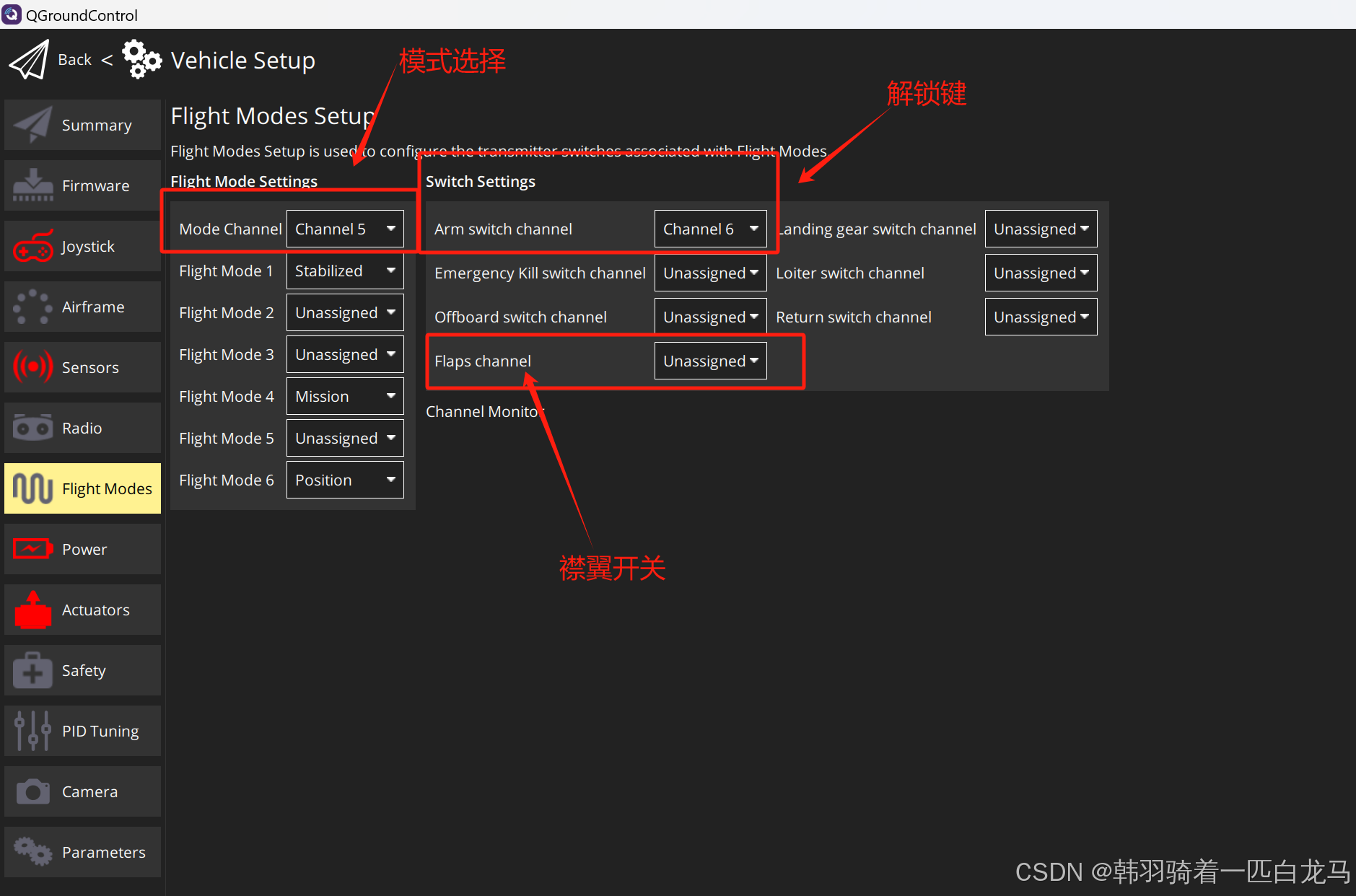
通常在此页面配置飞行模式以及解锁上锁开关,同时如果你有襟翼也可以设置襟翼档,需要注意的是,一定要注意拨杆的位置,不要误触,不要把解锁开关设置在遥控器上面的开关上,要设置在遥控器正面的位置防止误触。
提示:一定要注意,如果你的飞机manual手动模式下飞行很不稳定,需要stabilized模式稳定,那么就不要将manual和stabilized模式设置在一个开关上,否则在紧急切换模式下,一旦误触,直接寄了,因为这个我摔了一架飞机,把jetson nano摔成两半。
2.4电池设置
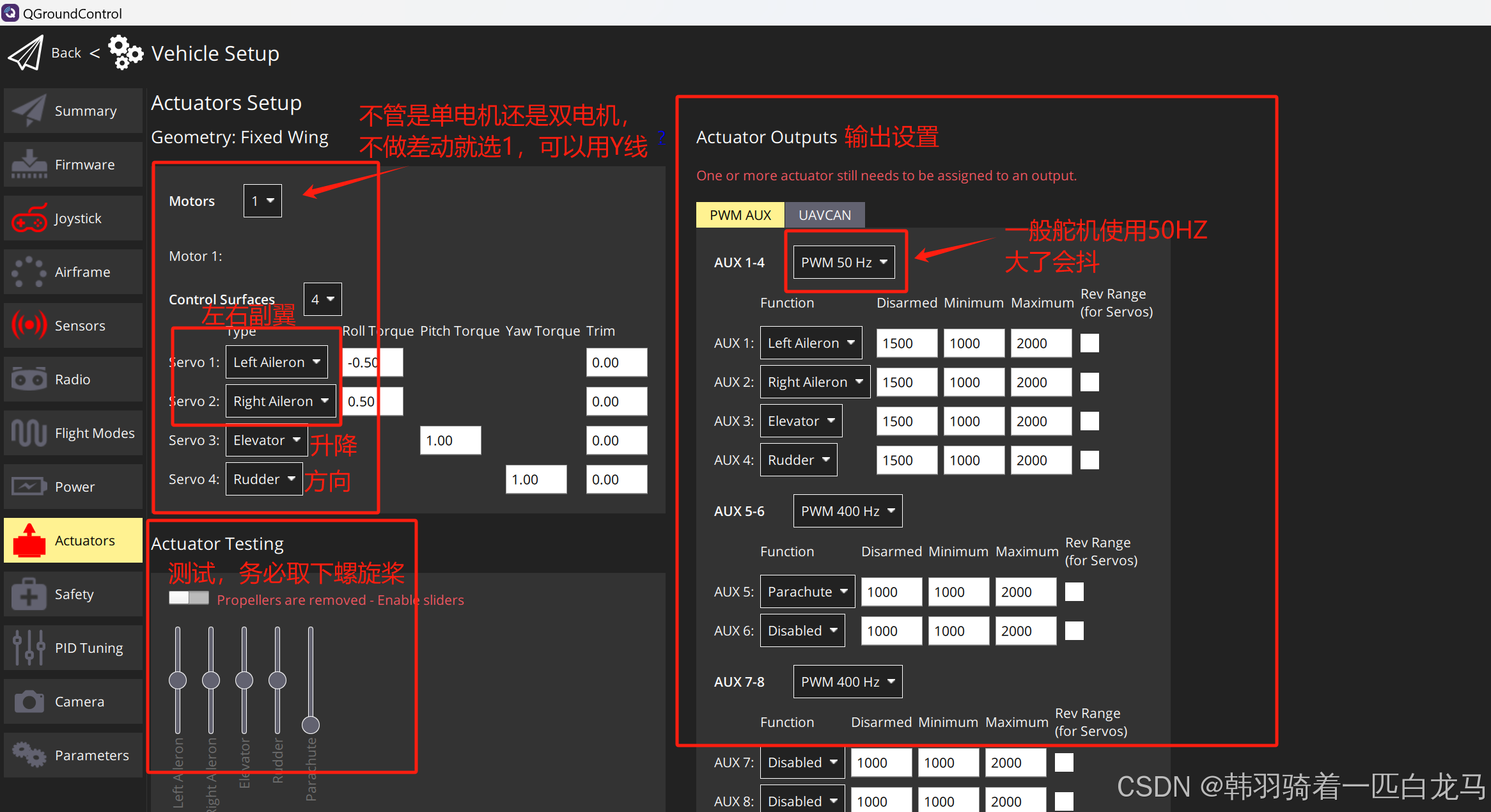
2.5电机舵机设置
舵机控制输出一般使用PWM50HZ,如果舵机反向就勾选Rev Range如果你的自稳方向是反的,就还是勾选Rev Range,如果自稳此时对了,手动操控是反的,就修改遥控器上的正反输出,其实就是先确定飞控的自稳舵面方向输出然后在改遥控器从而更改手动控制方向。V尾更是如此。
03-飞行测试
1.在对飞控基本设置完成后,到室外准备试飞,在外面由于和室内磁场环境不同,可能需要重新校准指南针(磁罗盘);
2.起飞前需要检查螺旋桨是否装紧,螺旋桨、舵面、自稳方向是否正确,强烈建议在每次起飞前都要查看,有一个舵面反了就完蛋;
3.在飞行前要熟悉解锁、飞行模式、襟翼等开关的位置,再次提醒:如果你的飞机manual手动模式下飞行很不稳定,需要stabilized模式稳定,那么就不要将manual和stabilized模式设置在一个开关上,否则在紧急切换模式下,一旦误触,直接寄了;
4,如果你的飞行稳定,无其他问题就可以准备测试mission模式了;
04-Mission模式
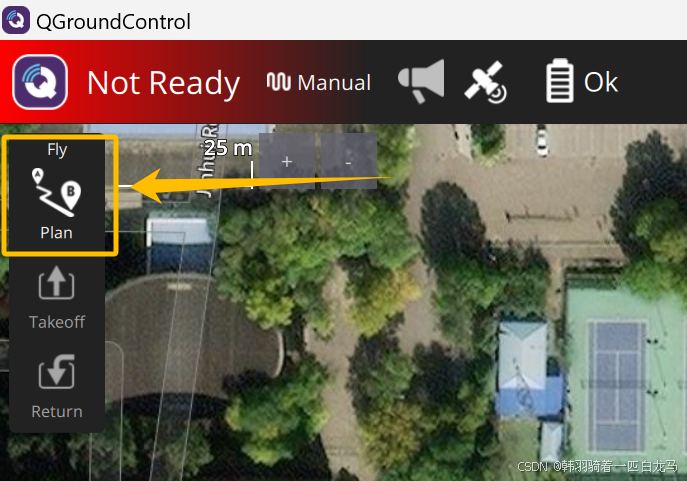
使用QGC地面站(QGroundConrtol)规划航线,点击Plan;
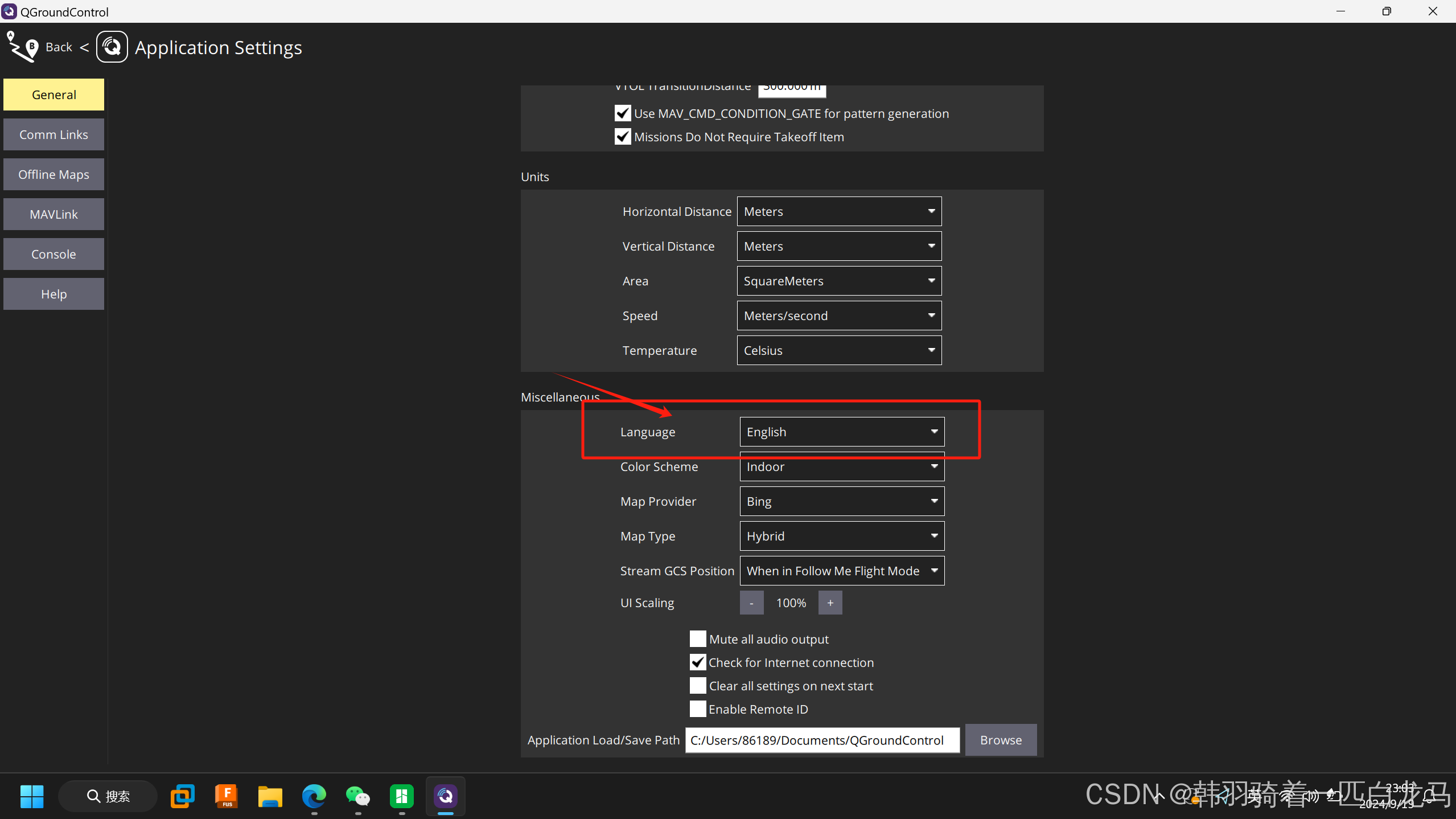
哦对了如果你发现你的最新版地面站不能规划航线,那么恭喜你,这个问题困扰了我半年,直到我发现把软件语言改成英文就能规划了,神不神奇,奥利给。
4.1自动起飞
自动起飞一般是在自动巡航没问题以后进行的测试,所以可以先看下面的自动巡航,等自动巡航没有问题了再来看自动起飞;
自动起飞的设置在界面上有如下设置:
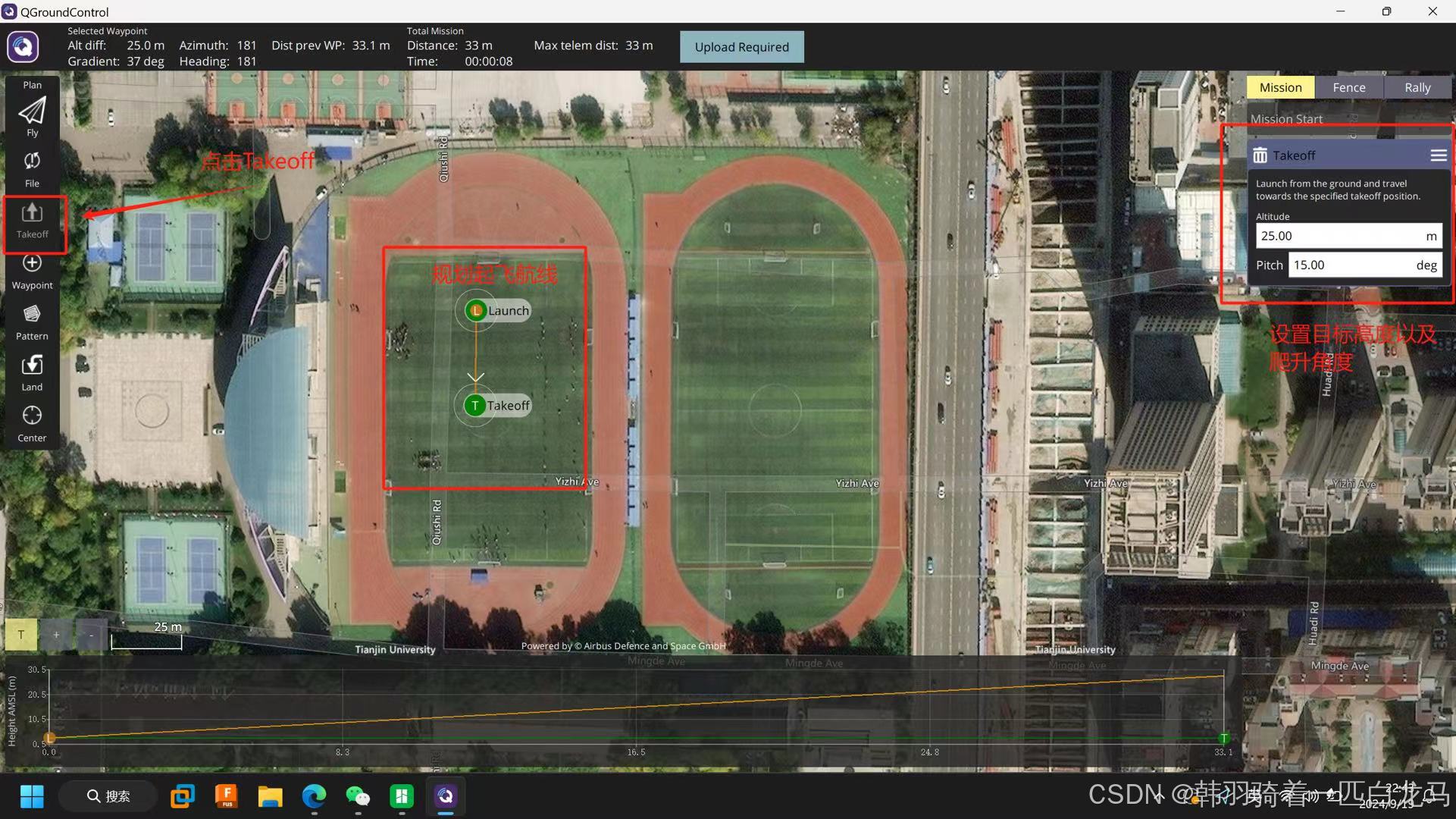
同时还有相关参数对自动起飞有影响:
MIS_TAKEOFF_ALT 起飞爬升到的高度
FW_TKO_AIRSPD 起飞空速
FW_T_CLMB_MAX 最大爬升率
FW_FLAPS_TO_SCL 襟翼设定点
FW_LAUN_AC_THLD 加速度阈值(在手抛起飞时只有检测到此加速度电机才启动)
FW_LAUN_AC_T(手抛起飞加速度判定持续时间,只有加速度持续了这个时间电机才开始转)
4.2自动巡航
点击Waypoint即可开始规划航点,在右侧可以设置每个航点的高度等基础信息;
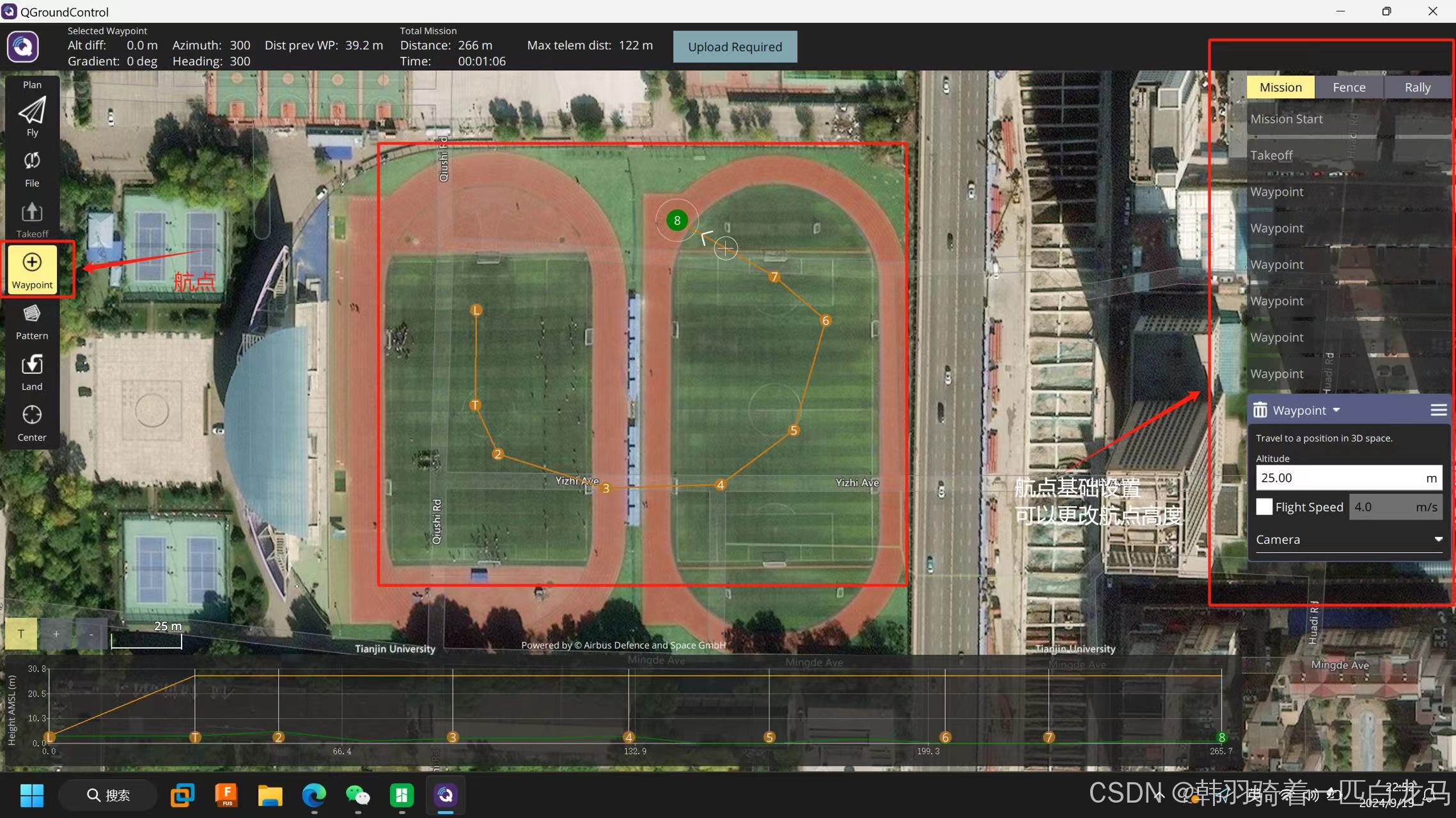
在自动巡航时,大概率会遇到飞行半径过大,吃不到航点的问题,这时候主要修改几个参数:敲黑板#
NAV_ACC_RAD 航点水平置信半径(我设的5m)
NAV_FW_ALT_RAD 航点高度置信半径(我设的也是5m)
FW_MAN_R_MAX 最大横滚角(我改的60°)
FW_THR_MAX/MIN/TRIM 最大/小/巡航油门(我的飞机是最大60,最低0,巡航40,要根据你手飞时油门情况确定巡航油门)
FW_THR_SLEW_MAX 巡航油门动态范围(我写的1)
基本上改了这几个个参数,你的飞行器能够稳定的吃到航点.
4.3自动降落
点击Land图标规划降落航线,取消勾选Use loiter to altitude,设置下降角度或者下降距离。
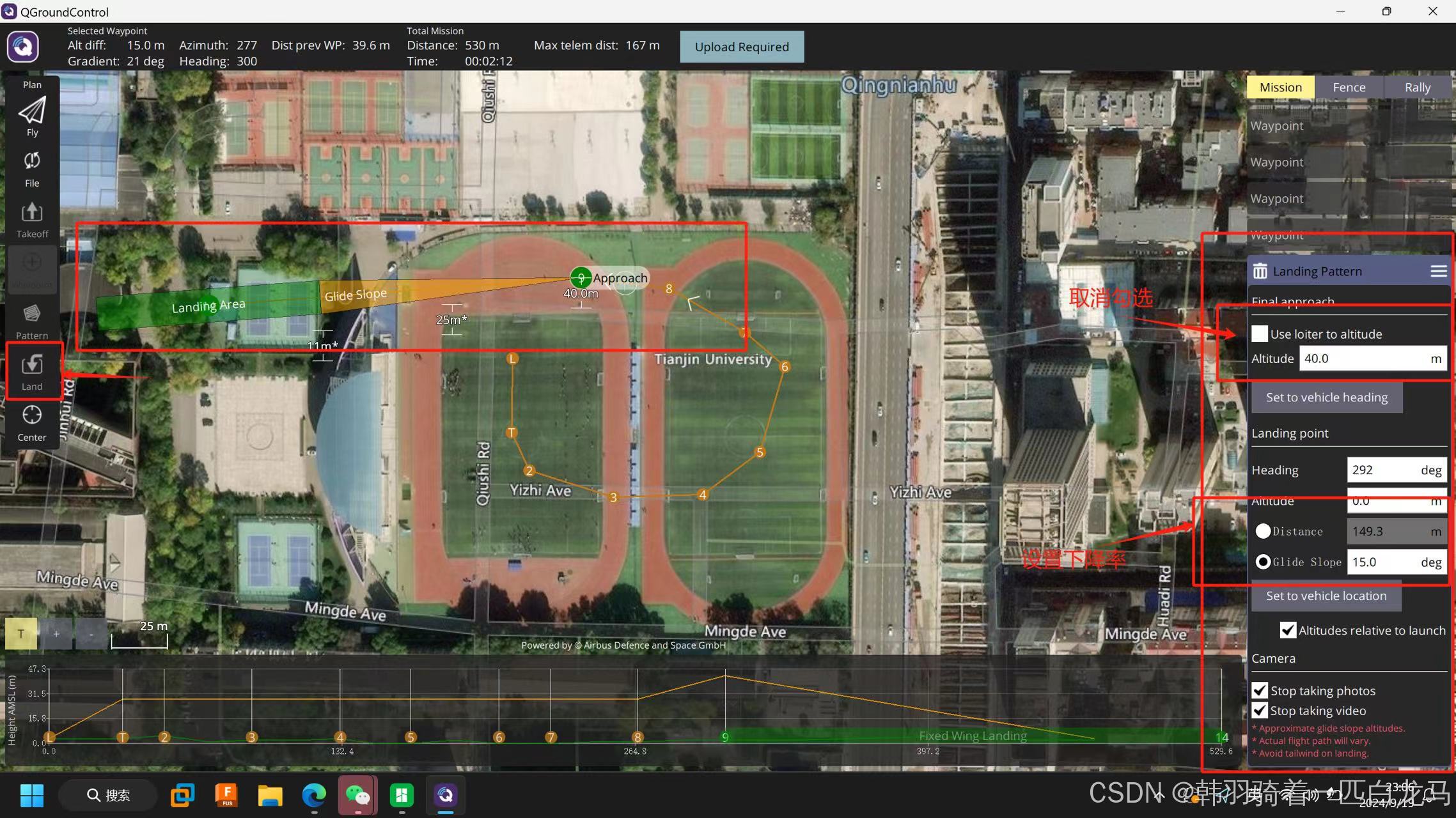
在固定翼自动降落中有很多考究的参数需要更改;如下附上一张鄙人的笔记:
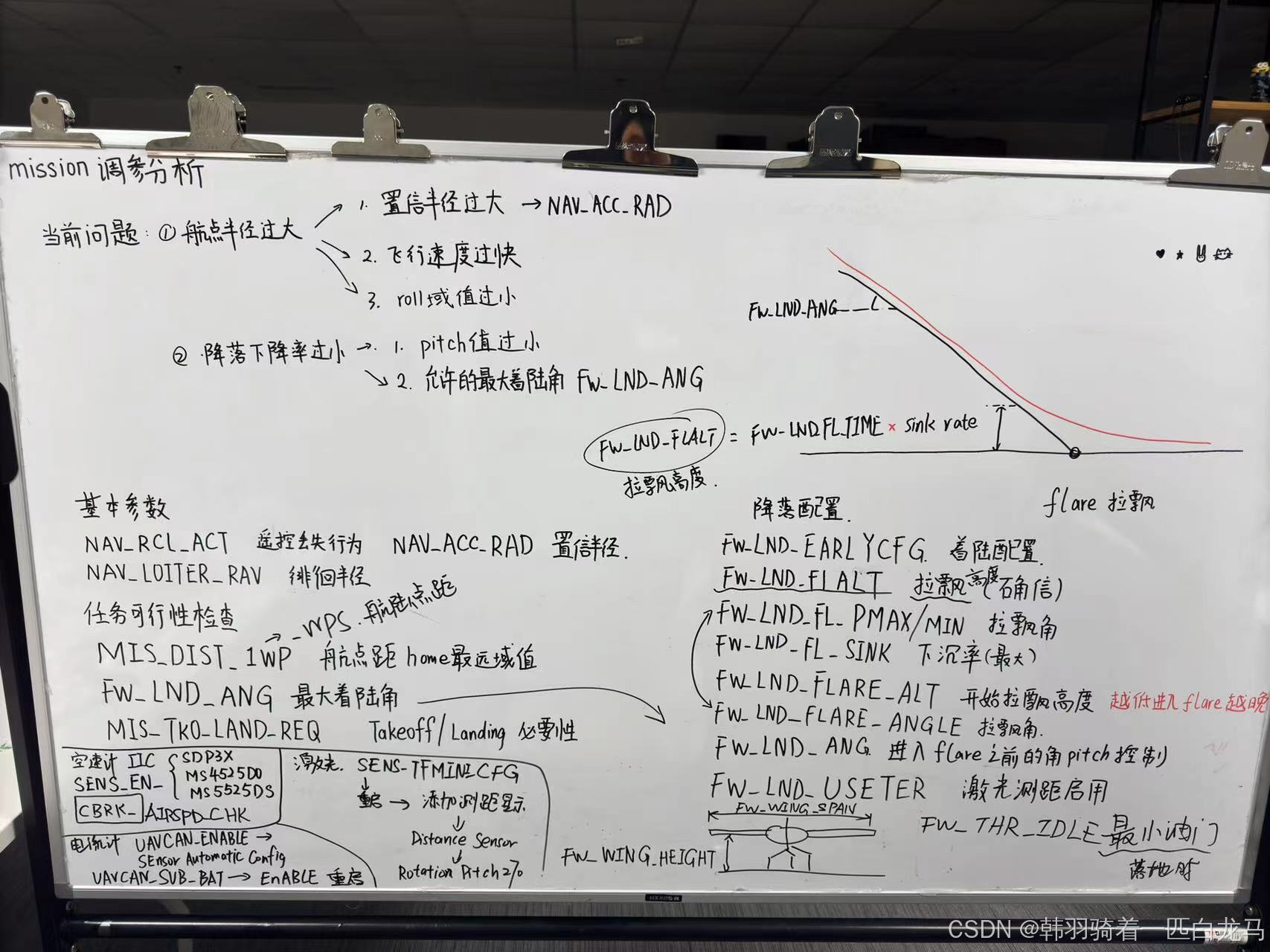
首先要注意的是:FW_LAN_ANG下降角,默认比较小,我改到了最大15°不然你角度大于这个值时无法上传任务。
根据PX4手册的介绍,飞机在降落过程中有两大状态,一个是高度下降阶段,一个是拉飘阶段(他叫flare,有道词典翻译成耀斑。。。)你需要设置flare拉飘高度FW_LND_FLALT,这个值其实只是依靠气压计不准确,所以我使用了激光测距仪进行精准定高;
今天写到了十一点多了,明天再写了,未完待续,欢迎在评论区交流!


















 5552
5552

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











