







借助介绍 AEB 系统的感知架构,本文主要讲解当前领航辅助驾驶系统 NOA 解决方案。以下章节的技术参数可能不是各厂商当前最新配置,权当是方便大家理解,请把关注重点移回如何开发出 AEB 产品。
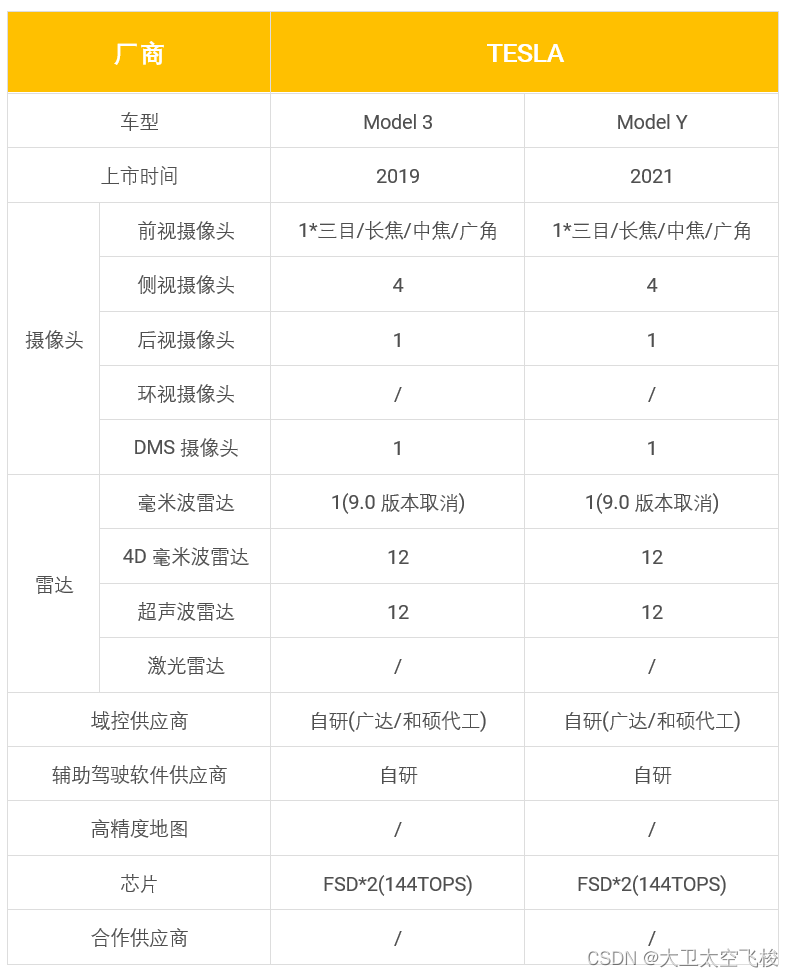
1. Tesla 特斯拉 NOA 解决方案
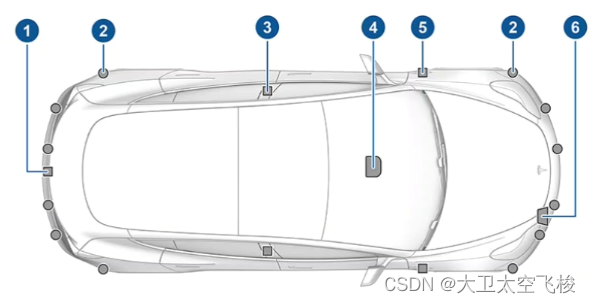
• 后车牌的上方装有一个摄像头;
• 超声波传感器位于前后保险杠中;
• 各门柱均装有一个摄像头;
• 后视镜上方的挡风玻璃上装有三个摄像头;
• 每块前挡泥板上装有一个摄像头;
• 雷达安装在前保险杠后面。
1.1 技术参数
1.2 配备功能
• 单车道巡航;
• 自动调速(限速、弯道);
• 自动超车;
• 主动变道;
• 自动上下匝道;
• 自动匝道通行;
• 隧道通行;
• 自动汇入/汇出主路;
• 识别交通锥桶。
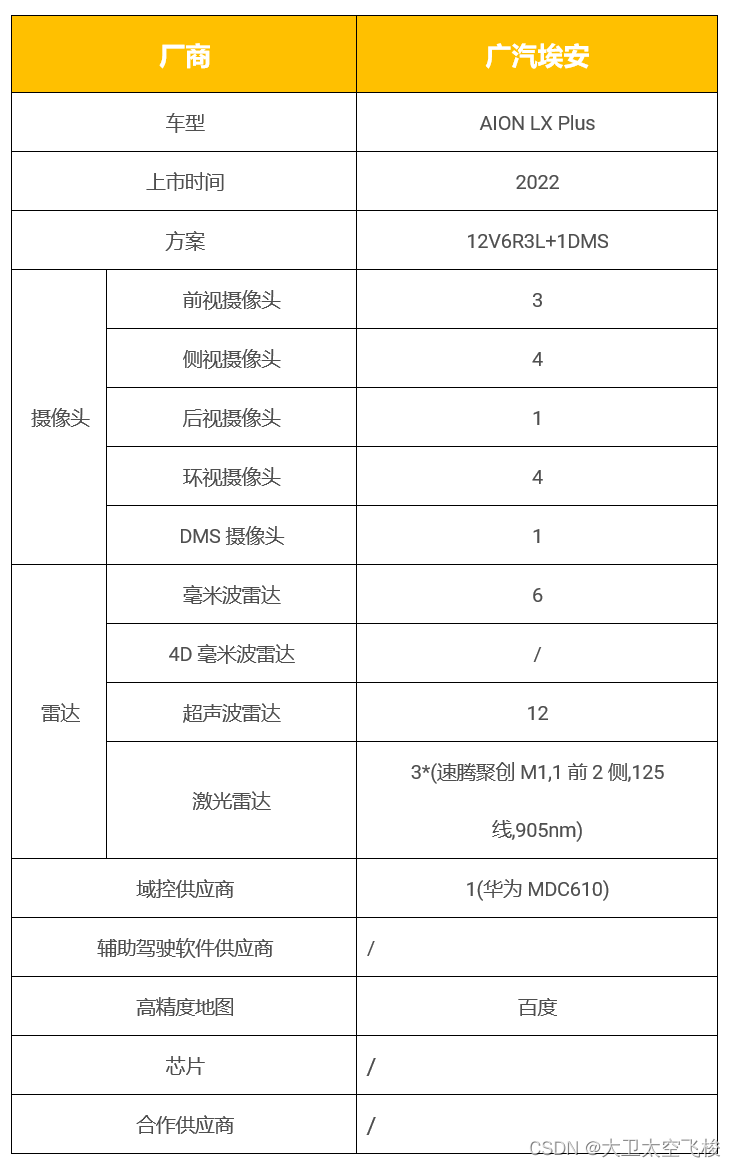
2. 广汽埃安 NDA 解决方案
2.1 技术参数
2.2 配备功能
• 单车道巡航;
• 自动超车;
• 主动变道;
• 主动避让大车(智慧礼让);
• 自动上下匝道;
• 匝道通行;
• 自动汇入/汇出主路。
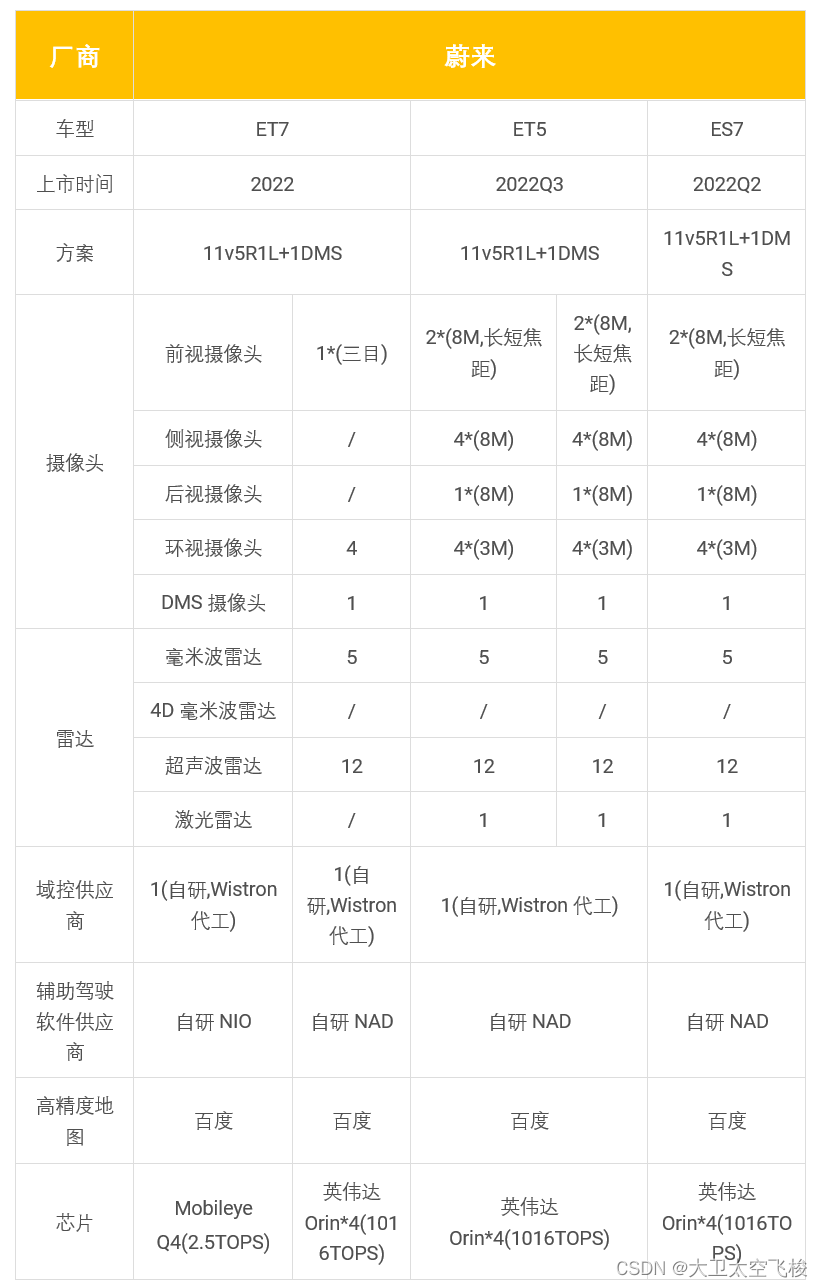
3. 蔚来 NOP 解决方案
3.1 技术参数
3.2 配备功能
• 单车道巡航;
• 自动调速(限速、弯道);
• 自动超车;
• 主动变道;
• 自动上下匝道;
• 自动匝道通行;
• 隧道通行;
• 自动汇入/汇出主路。
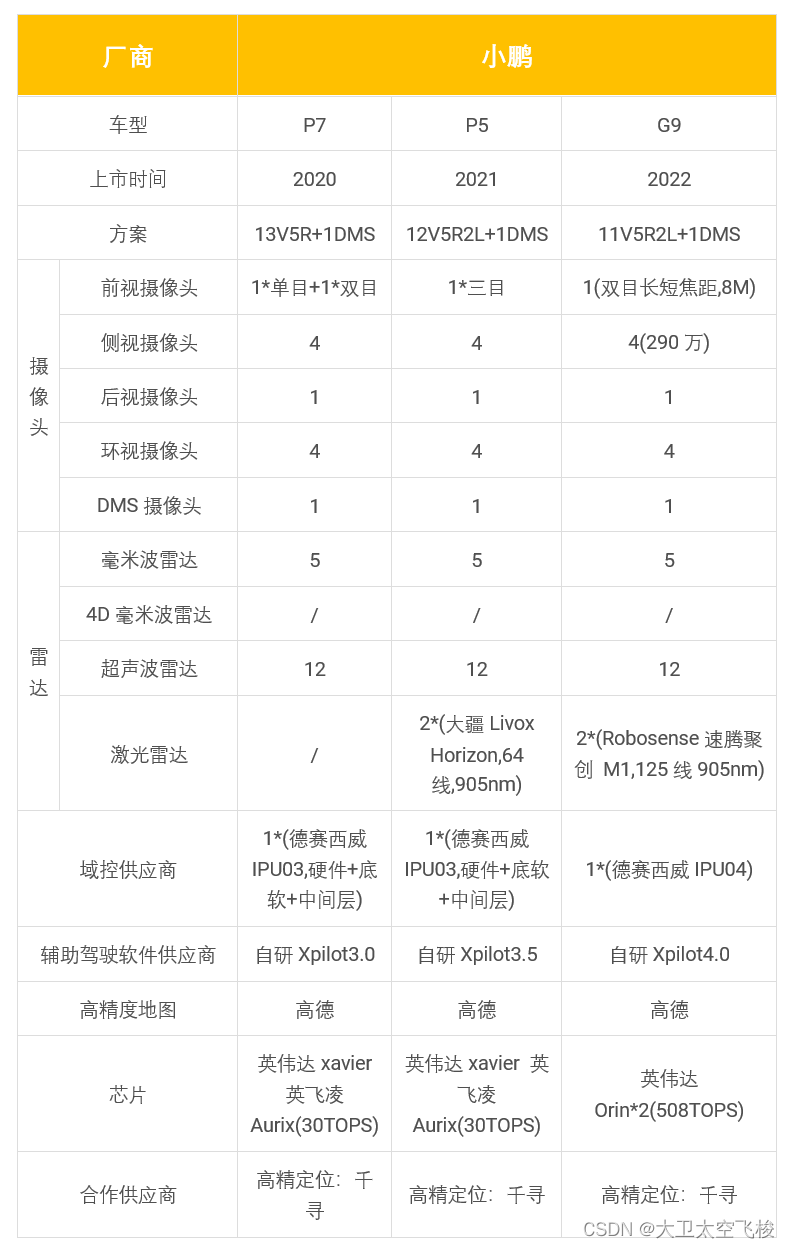
4. 小鹏 NGP 解决方案
4.1 技术参数
4.2 配备功能
• 单车道巡航、自动选择最优车道;
• 自动调速(限速、弯道);
• 自动超车;
• 主动变道;
• 主动避让大车;
• 自动上下匝道;
• 自动匝道通行;
• 隧道通行;
• 自动汇入/汇出主路;
• 识别交通锥桶和故障;
• 夜间超车提示。
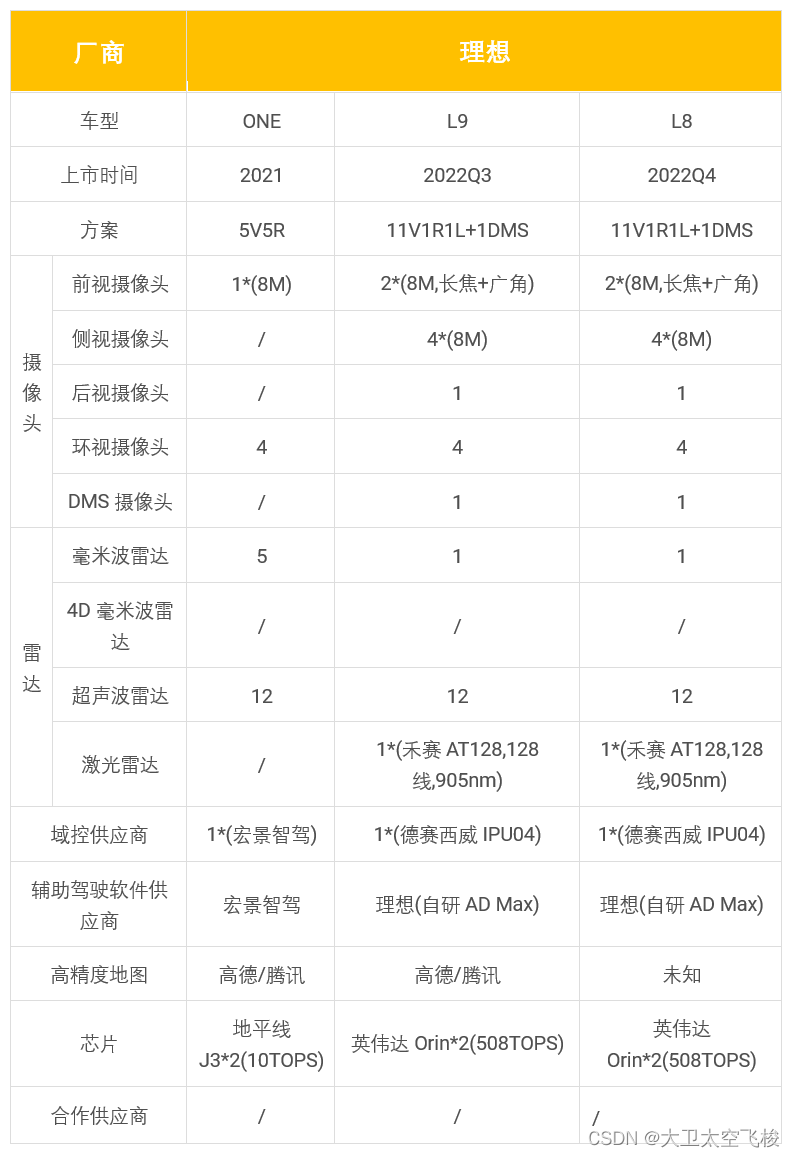
5. 理想 NOA 解决方案
5.1 技术参数
5.2 配备功能
• 单车道巡航;
• 自动调速(限速、弯道);
• 自动超车;
• 主动变道;
• 主动避让大车;
• 自动上下匝道;
• 自动匝道通行;
• 隧道通行;
• 自动汇入/汇出主路;
• 货车切入小车加塞提醒。
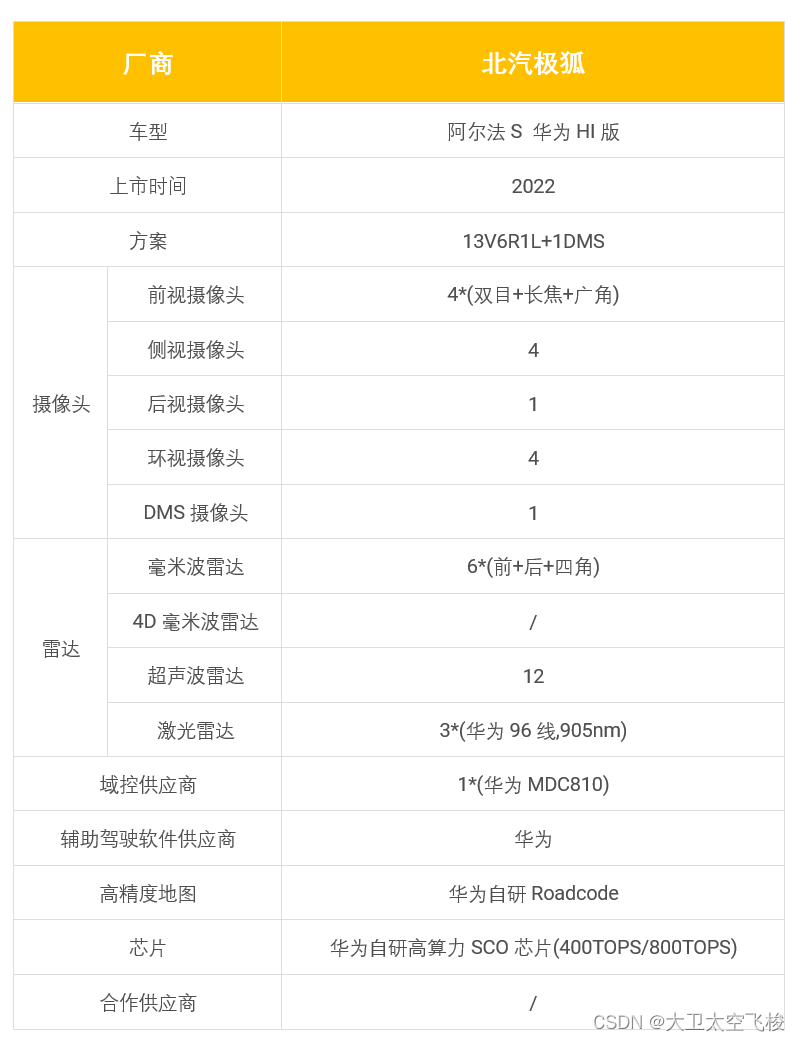
6. 北汽极狐 NOA 解决方案
6.1 技术参数
6.2 配备功能
• 单车道巡航;
• 自动超车;
• 主动变道;
• 主动避让大车;
• 自动上下匝道;
• 匝道通行;
• 自动汇入/汇出主路;
• 应对前车加塞;
• 无保护路口左转;
• 人车混行避障;
• 避让突然闯入的车辆/电动车。
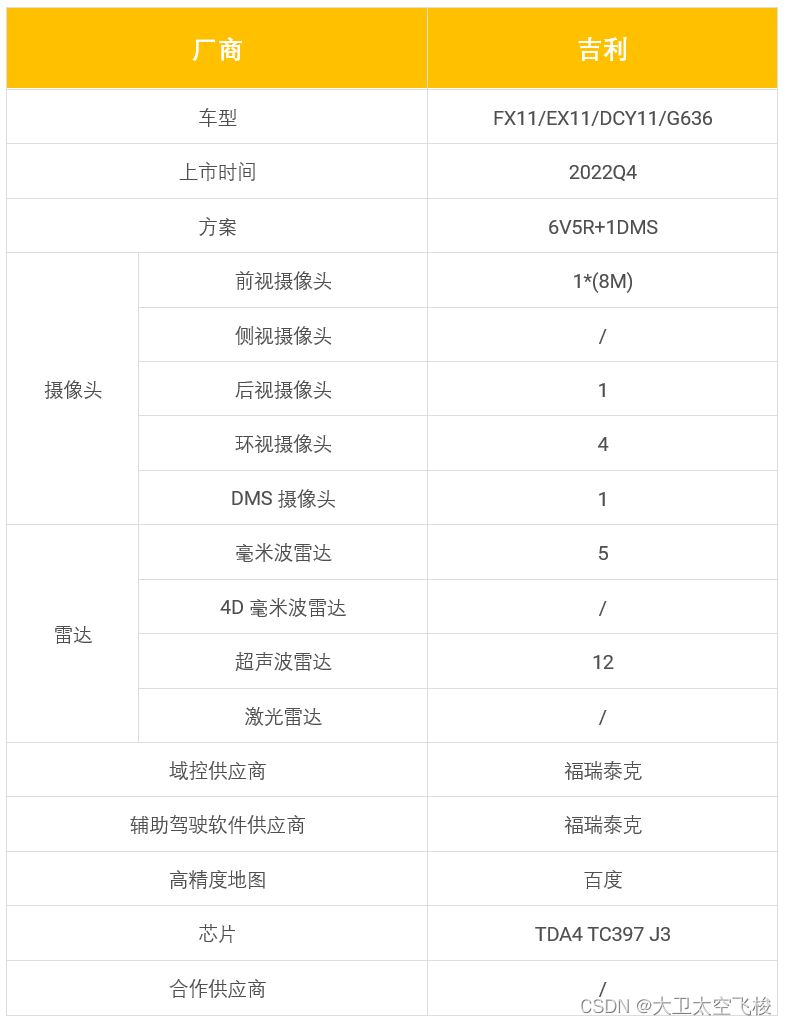
7. 吉利 NOA 解决方案
7.1 技术参数
7.2 配备功能
ODD区域内:
可实现自动上下匝道、自动切换高快速路、驶入目标车道、超越慢车、微避障等功能,实现高速(高架)公路点对点的自动驾驶辅助。
非ODD区域内
主要由PA(Pilot Assist)领航辅助、ALCA(Auto Lane Change Assist)自动变道辅助等功能来应对各类细分化场景。
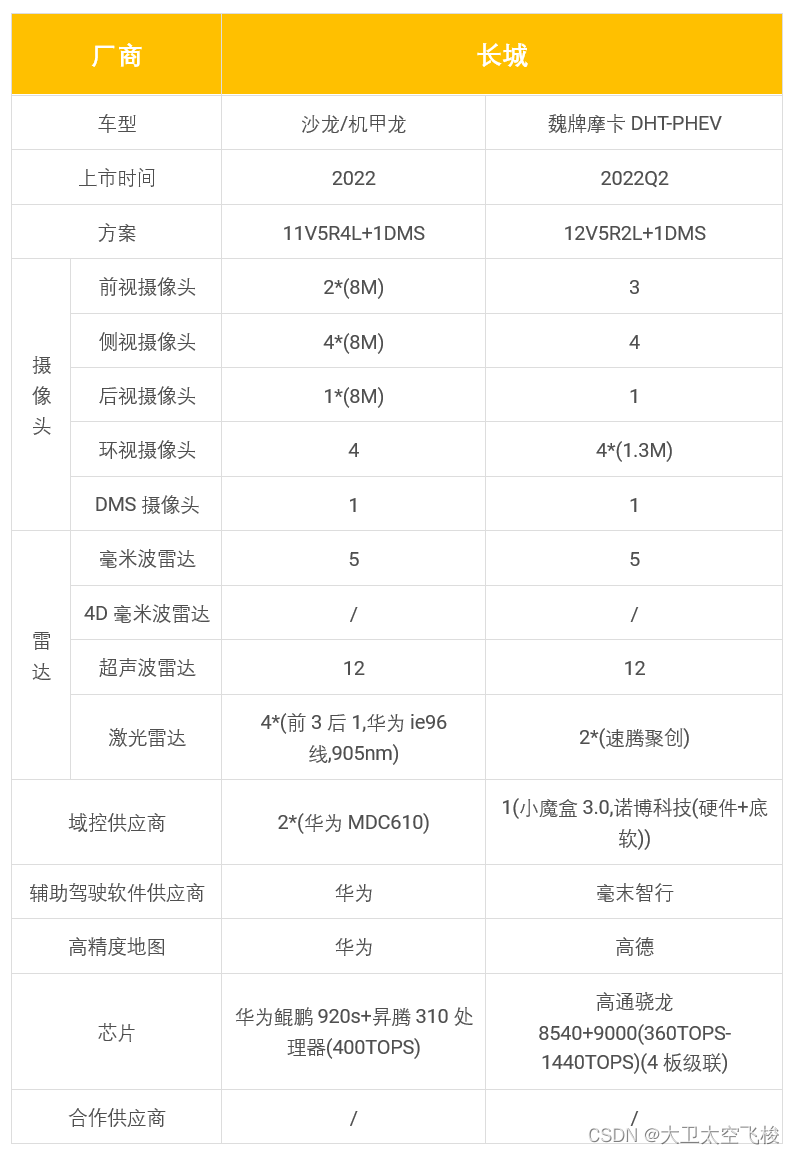
8. 长城 NOA 解决方案
8.1 技术参数
8.2 配备功能
• 单车道巡航、
• 自动调速(限速、弯道);
• 自动超车;
• 主动变道;
• 主动避让大车;
• 自动上下匝道;
• 自动匝道通行;
• 隧道通行;
• 自动汇入/汇出主路。
• 卫兵系统:
对外实时监控道路、天气等变化;
实时分析驾驶员状态,防止分神、脱手等情况发生;
对系统的软硬件安全运营情况,全程跟踪。
10. 控制器架构 SOC+MCU
10.1 微控制单元
Microcontroller Unit,MCU:又称单片微型计算机 (Single Chip Microcomputer )或者单片机,是把中央处理器 (Central Process Unit, CPU)的频率与规格做适当缩减,并将内存 (memory)、计数器 (Timer)、USB、A/D转换、UART、PLC、DMA 等周边接口,甚至 LCD 驱动电路都整合在单一芯片上,形成芯片级的计算机,为不同的应用场合做不同组合控制。诸如手机、PC、汽车电子、工业上的机器手臂的控制等,都可见到 MCU 的身影。
10.2 系统级芯片
System-On-Chip,SOC:它是一种高度集成的电子芯片,其中包含了多个主要组件,例如 CPU、DSP、GPU、存储器模块、外设接口等电路和组件,这种高度集成的结构使得 SOC 能够实现更小尺寸、低功耗和更高性能。它集成了多种功能,如车载信息娱乐系统、驾驶员辅助系统、车身控制系统、车载通信系统等。它比 MCU 更实用,因为它消除了集成的组件之间的通信和互动中的瓶颈,同时满足了较高的可靠性和安全性要求。

















 1415
1415











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











