







 本文详细介绍了ACC自适应巡航控制系统对汽车执行器的性能要求,包括对整车控制单元(VCU)的扭矩响应时间、超调误差、响应斜率、稳态误差和扭矩稳定时间等方面的指标。此外,还讨论了VCU与ESC(电子稳定控制系统)的角色,强调了它们在汽车动力控制和安全驾驶中的重要性。
本文详细介绍了ACC自适应巡航控制系统对汽车执行器的性能要求,包括对整车控制单元(VCU)的扭矩响应时间、超调误差、响应斜率、稳态误差和扭矩稳定时间等方面的指标。此外,还讨论了VCU与ESC(电子稳定控制系统)的角色,强调了它们在汽车动力控制和安全驾驶中的重要性。
本专题由深圳季连AIgraphX李博及团队出品,主要讲解ACC自适应巡航控制系统的开发与仿真测试。具体说来,包括ACC标准/法规分析、系统需求、系统架构、软件需求、软件架构、算法建模、验证场景分析、仿真实验搭建等内容。
本节主要讲ACC对执行器性能详细要求。
1. ACC与执行器
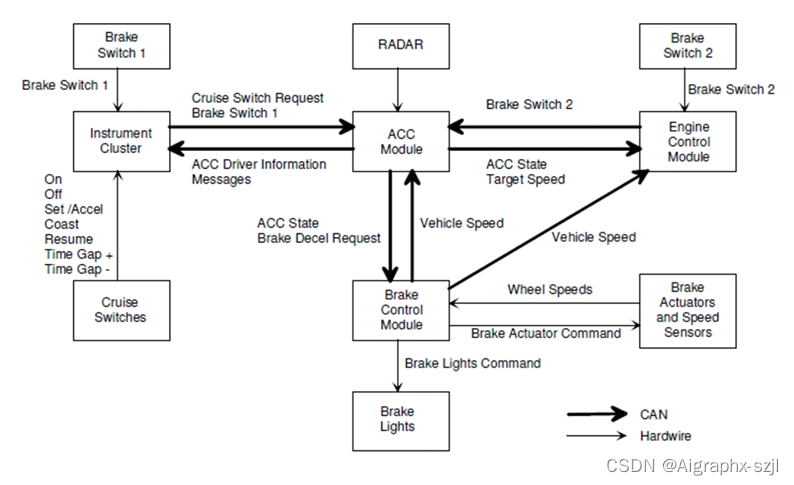
汽车的传感器(雷达/摄像头/IMU)会根据前车以及本车的行驶状态(车距和速度),经过VCU/ECU的计算判断后,向执行器(电子节气门,制动,档位)发送指令,以决定自己的行驶状态是加速、减速,还是退出自动巡航控制ACC。
备注:有车企正在探讨把纵向加速功能放在VCU,减速功能放在ESC,底盘横纵向转向控制放在EPS,没有专门域控制器来实现。
个人认为,未来安全需要,行车基础功能包应该部署在VCU车身域控、智驾域控各一套。以免当自动驾驶系统失效时,本车能安全驶离当前行车道上,并停放在路边,打开双闪。
2. 整车控制单元(Vehicle Control Unit,VCU)
车辆控制单元(Vehicle Control Unit,VCU,又叫整车控制单元)主要由以下几个部分组成:
- 硬件电路:主控芯片及周边的时钟电路、复位电路、电源模块等。
- 底层软件:这是实现各种车辆控制算法的软件,例如引擎控制、变速器控制等。
- 应用层软件:这是实现各种车辆应用功能的软件,例如导航控制、空调控制等。
- 外壳:主要用于硬件电路的保护以及密封,要满足防水、防尘等清洁度要求,也要满足避免跌落、振动等机械要求。
在最小系统以外,VCU还配备数字信号处理电路、模拟信号处理电路、频率信号处理电路、通讯接口电路(包括CAN通讯接口和RS232通讯接口)。
车辆控制单元(Vehicle Control Unit,VCU)和自适应巡航控制(Adaptive Cruise Control,ACC)是汽车中的不同部件。
VCU主要负责车辆的动力控制,包括加速、减速、制动等操作。它通过与加速踏板/制动踏板等输入设备以及车辆的传感器进行交互,实现车辆的稳定行驶和响应驾驶员的驾驶意图。
而ACC则是一种先进的驾驶辅助系统,主要用于车辆的纵向控制,包括自适应巡航、碰撞预警、自动制动等功能。它通过雷达和摄像头等传感器获取车辆周围的信息,并根据这些信息自动控制车辆的行驶。在某些情况下,例如在高速公路上行驶时,ACC可以接管车辆的纵向控制,减轻驾驶员的负担。
虽然VCU和ACC在汽车中扮演不同的角色,但它们都是汽车控制系统的重要组成部分,对于提高汽车的舒适性、安全性以及驾驶体验都起着重要作用。
2.1 ACC对VCU性能要求
自适应巡航控制(ACC)系统对车辆控制单元(VCU)的性能要求主要包括以下几个方面:
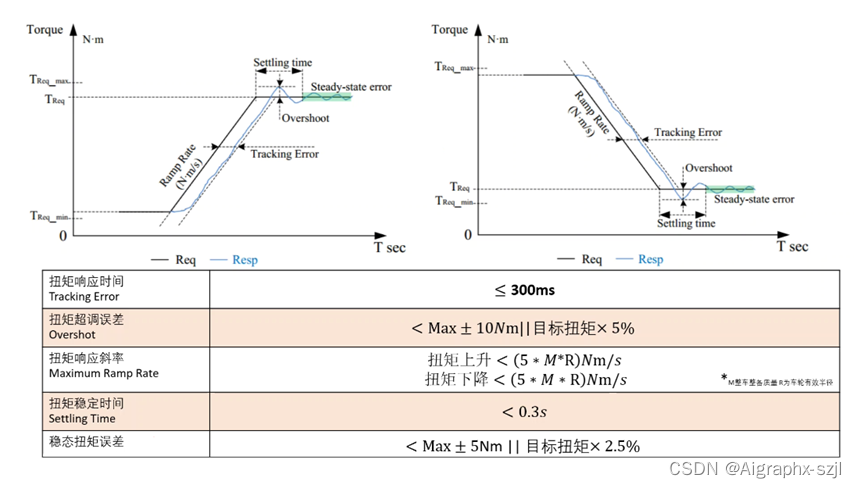
- 扭矩响应时间:为了确保自适应巡航系统的性能和响应速度,VCU的扭矩响应时间需要尽可能快。一般来说,扭矩响应时间在两三百毫秒内完成。
- 超调误差:VCU的扭矩响应不能有过大的超调误差,一般要求在5%以内。
- 响应斜率:VCU的扭矩响应需要有一定的斜率,以确保系统的稳定性。一般来说,响应斜率在5以上即可满足要求。
- 稳态误差:VCU的扭矩稳态误差需要在一定范围内,一般来说,稳态误差在2.5%以内即可满足要求。
- 扭矩稳定时间:在达到稳态误差后,VCU的扭矩需要在一个较短的时间内稳定下来,一般来说,扭矩稳定时间在0.3秒以内即可满足要求。
总的来说,为了确保自适应巡航系统的性能和响应速度,VCU需要具备快速响应、低超调误差、合适响应斜率、低稳态误差以及快速稳定的扭矩响应等性能指标。
2.2 动力行驶功能
整车 Ready 状态,VCU 根据驾驶员输入信息(加速踏板、制动踏板、档位、驾驶模式),结合车辆状态信息(车速、电池 SOC、电池最大放电电流、电池最大充电电流、电机最大输出扭矩),计算车辆驱动扭矩需求,发送扭矩需求和电机模式请求给 MCU,MCU 控制驱动电机输出车辆驱动行驶所需扭矩。
系统组成如下:
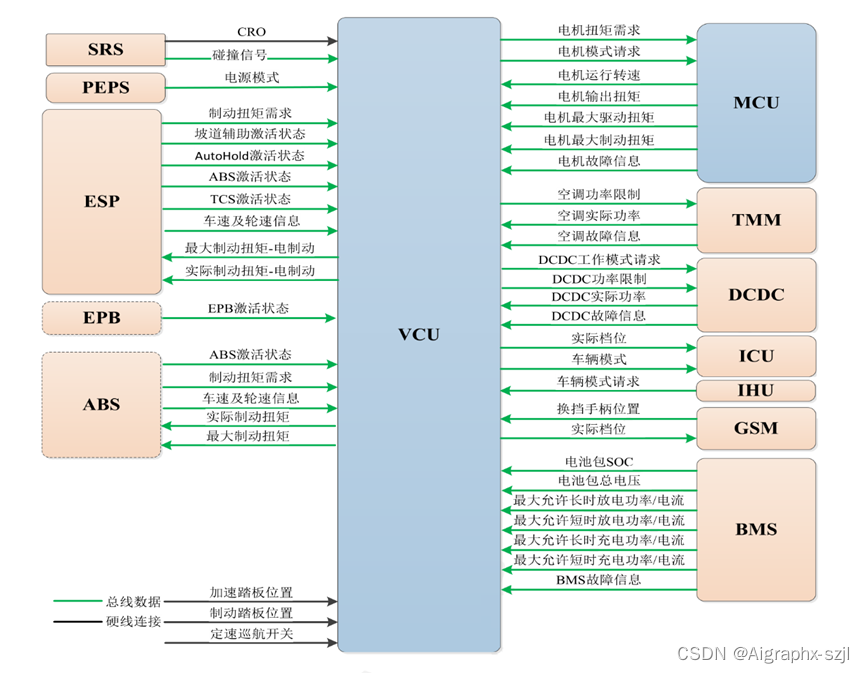
图片摘自新能源汽研所
2.3 定速巡航控制CC
定速巡航是规范 VCU 在车辆行驶过程中,根据巡航开关及制动踏板状态,控制车辆进入定速巡航模式;驾驶员无需踩踏板,VCU 便会根据定速巡航设定车速,通过对车速 PI 闭环,控制电机输出扭矩以维持在目标车速行驶状态:
1) 根据巡航开关及制动踏板状态,进入或退出定速巡航模式;
2) 在定速巡航模式下,通过巡航开关状态设定目标车速并控制电机输出扭矩维持目标车速。
系统组成如下图:
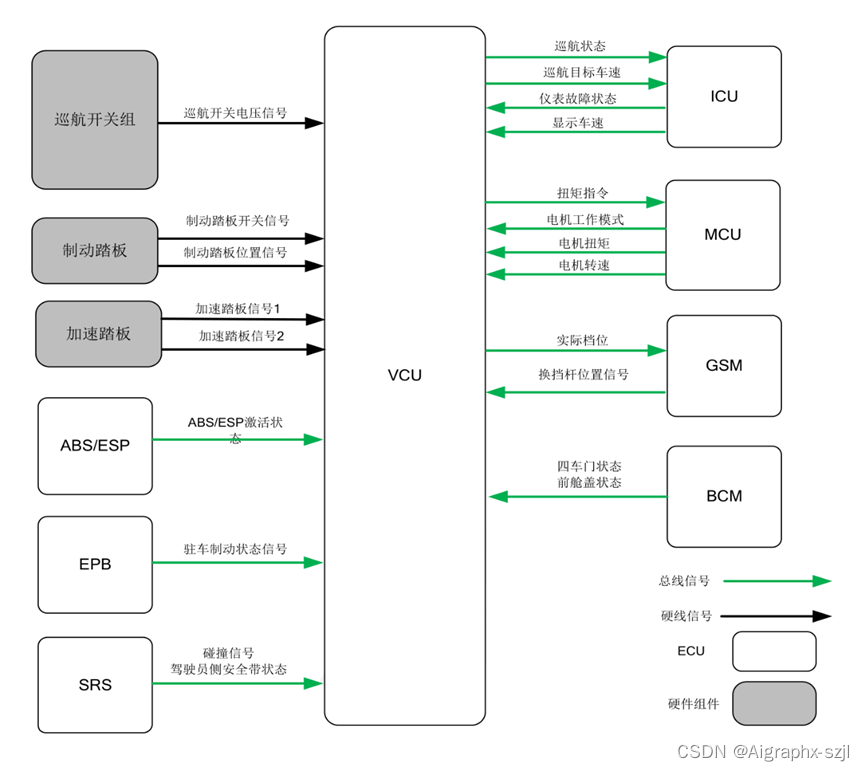
图片摘自新能源汽研所
2.4 自适应巡航控制ACC
自适应巡航控制根据车辆行驶方向的交通情况在纵向上自动控制车辆的加速与减,轻驾驶员操作负担。当前方无车辆或前方车辆距离较远时 FSRA 可以按照驾驶员设定的巡航速度行驶;当前方车辆距离较近时 FSRA 可以根据驾驶员设定的跟车时距自动保持与前方车辆间的相对距离。
系统组成如下:
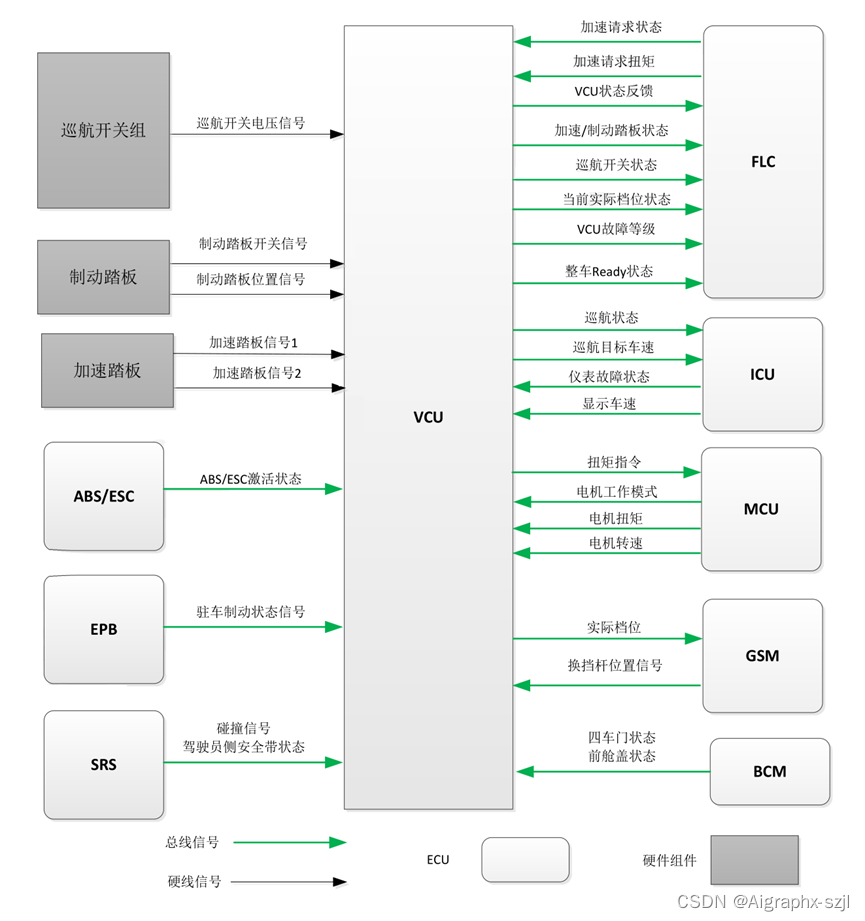
图片摘自新能源汽研所
备注:有些企业把ACC功能做在ADS域控上。
3. 电子节气门Electronic throttle
可以通俗的理解,传统汽车的节气门是控制油量,新能源汽车的电子节气门是控制电机转速。下面是ChatGPT回答,仅供参考。
3.1 燃油车节气门Throttle
节气门开度是指发动机节气门的开启角度,正常值一般在**1.6到5.0**之间。
汽车发动机的节气门由驾驶员通过油门踏板来改变发动机的进气量,从而控制发动机的运行。不同的节气门开度标志着发动机的不同运行工况。例如,当节气门角度过大时,发动机转速会过快,而当节气门角度过小时,可能会导致发动机抖动,甚至熄火。
如果节气门开度超出正常范围,需要及时进行调整。调整节气门开度可以通过改变操纵杆的长度来实现,使节气门踏板至迟关闭,踏板踏向节气门全开。
电子节气门开度并不完全由加速踏板位置决定。
3.2 新能源车电子节气门Electronic throttle
电子节气门系统的工作原理是控制单元根据当前行驶状况下整车对发动机的全部扭矩需求,计算出节气门的最佳开度,从而控制电机驱动节气门到达相应的开度,使发动机工作在最佳状态,以提高汽车的动力性、安全性及舒适性。电子节气门的开度是根据加速踏板的位置信息,以及发动机的工作模式和工作状态,通过一定的计算方法得到的。
因此,电子节气门的开度会受到多种因素的影响,包括但不限于加速踏板的位置、发动机的工作模式和工作状态等。
电子节气门(Electronic Throttle)主要由以下几个部分组成:
传感器:用于检测气体的流量和压力,以及汽车的其他相关参数,如车速、发动机转速等。
控制器:接收传感器传来的信号,根据这些信号判断出节气门的开度和位置,并向执行器发送指令。
执行器:根据控制器发送的指令,调节节气门的开度和位置。
这些组成部分协同工作,使得电子节气门能够实现精准、迅速的调节,以满足汽车在不同工况下的动力需求,同时保证汽车的动力和经济性能。
4. 电子稳定控制系统ESC/ESP
车辆行驶证道路上非常难以预测各种路况,譬如突然横穿马路的行人、湿滑的路面或道路上意想不到的障碍物等等,这些都可能迫使您进行突然的操作,从而导致您失去对车辆的控制,这时汽车的主动安全功能就派上了用场。
4.1 电子稳定控制系统ESC作用
电子稳定控制系统Electronic Stability Controller,ESC)是汽车中的一项主动安全功能,可防止驾驶员失去对车辆的控制。汽车中的ESC有助于防止在转弯、急刹车或执行突然操作时打滑。它会自动在各个车轮上应用制动器,并允许驾驶员保持对车辆的控制。该系统还监控其他因素,如转向、油门和围绕汽车垂直轴的旋转,以检测稳定性的丧失。
ESC也称为ESP(电子稳定程序)、VSA(车辆稳定辅助系统)、VDC(车辆动态控制)或DSC(动态稳定控制)。名称可能不同,但主要功能是相同的。
4.2 电子稳定控制系统ESC工作原理
ESC是电子汽车稳定控制系统和行驶安全性补充系统,可帮助汽车在快速转弯或变道,车辆极不稳定时,通过车轮制动器或控制发动机扭矩,来补偿车辆的稳定性。当汽车处于极不稳定的情况下时,ESC功能自动起作用。

有些车企又称ESP电子稳定系统,主要作用还是一样,主要在于能够减轻车辆侧滑造成致命车祸的主要威胁。

汽车电子稳定控制系统是车辆新型的主动安全系统,是汽车防抱死制动系统(ABS)和牵引力控制系统(TCS)功能的进一步扩展,它通过ECU控制前后、左右车轮的驱动力和制动力,确保车辆行驶的侧向稳定性。
与发动机ECU协同工作,当驱动轮打滑时通过对比各个车轮的转速,电子系统判断出驱动轮是否打滑,立刻自动减少节气门进气量,降低发动机转速从而减少动力输出,对打滑的驱动轮进行制动。这样便可以减少打滑并保持轮胎与地面抓地力之间最合适的动力输出,此时无论怎么给油,驱动轮都不会发生打滑现象。
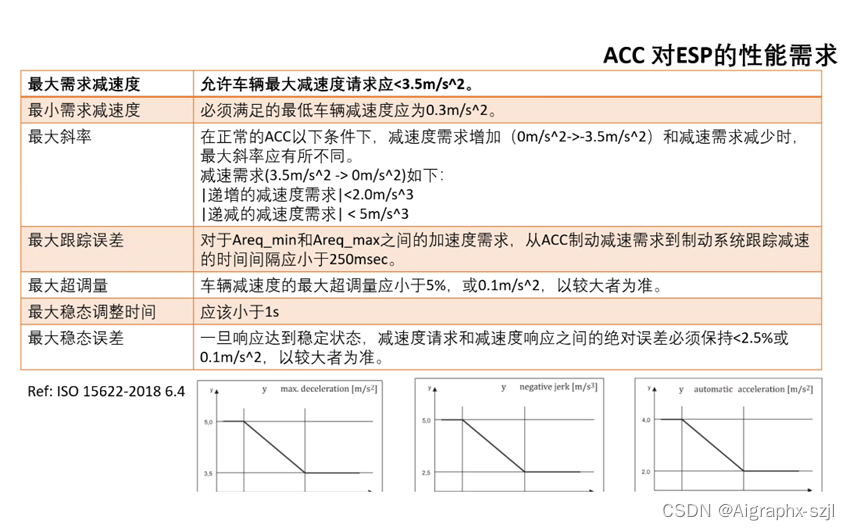
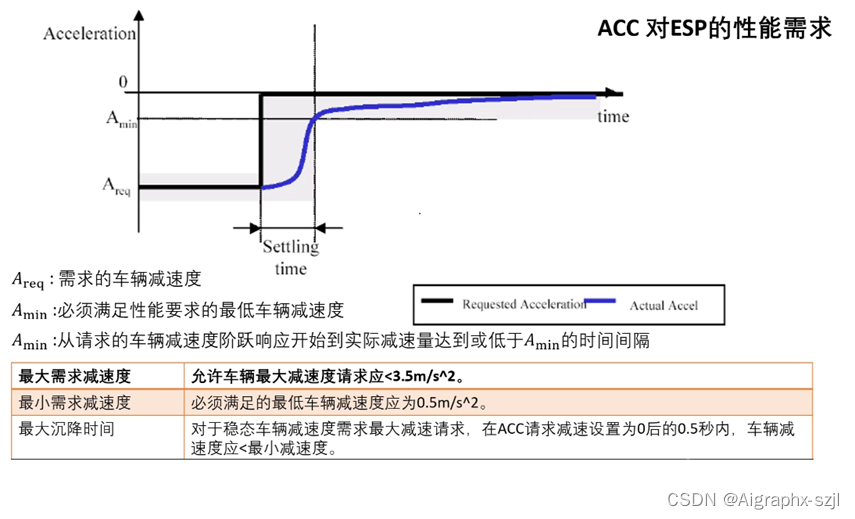
5. ACC对ESP性能详细要求
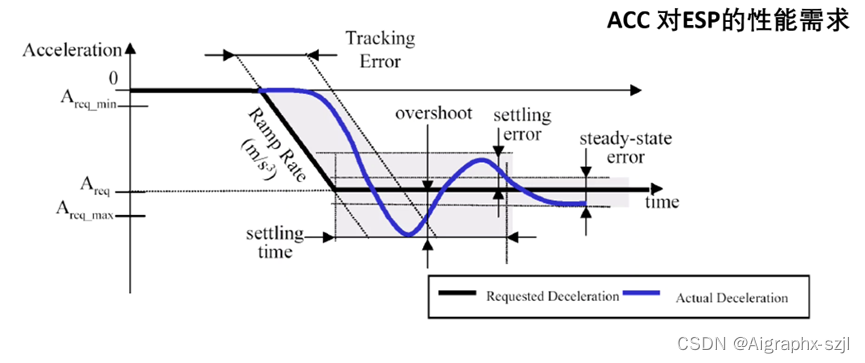
Areq:需求的车辆减速度
Areq_max:最大允许车辆减速请求
Areq_min:必须满足性能要求的最低车辆减速度
TrackingError:从制动减速需求命令到车辆跟随减速的时间值
Ramp Rate:车辆需求减速度的变化率
Overshoot:车辆实际减速度的最大值与目标车辆减速度之间的差值与目标减速度的百分比Settling Time:目标减速度最大值与实际响应减速度达到稳态时(偏差5%)的时间间隔
6. 电子控制器单元(Electronic Control Unit,ECU)
又称为行车电脑。
6.1 ECU模式管理要求
参见AUTOSAR CP R20-11文档 Requirements on Mode Management。
AUTOSAR_SRS_ModeManagement.pdf
500ms唤醒
6.2 Power Mode Management
ECU Mode
OFF
Stand-by
Sleep
Normal
ShutDown
6.3 ECU State Manager
管理ECU状态及状态之间的条件,管理唤醒事件及配置ECU休眠
6.3.1 配置
配置ECU使用者的状态管理
配置唤醒
6.3.2 正常运行
ECU状态管理器应在操作系统关闭后接管控制权,为下次唤醒做准备,然后进入of或者Sleep状态
支持多种Shutdown
ECU支持可选择进入那种Shutdown模式
ECU应支持反馈是否进入目标shutdown模式
多种休眠模式
通过API选择休眠模式
ECU应支持反馈是最后进入的目标Sleep模式
可以强制关闭ECU
可以通过API查询当前状态
ECU应能接收所有唤醒事件
存储当前唤醒原因,并可以通过诊断工具读取
ECU收到唤醒报文时,应开始计时,当在Timeout结束之前,收到有效信息,则停止计时,系统通道唤醒
可以通过API查询唤醒原因
ECU状态管理器应提供所选复位方式的查询通过API查询复位原因
提供选择Boot目标查询上次复位时间
查询上次复位时间
在关机过程中,ECU状态管理器应在适当的情况下对基本软件模块进行反初始化提供运行状态的请求和释放
6.3.3 常有状态
固定状态
Run
Off
Sleep
瞬时状态
开启
唤醒
关闭
基础软件/系统/RTE等模块的初始化和反初始化
与相关资源管理器合作,需要时关闭ECU
触发时钟
功能需求:
主要状态的数量和名称以及主要状态之间的转换应标准化。
运行状态应具有最短的持续时间。
应提供开启/调用程序的条件
应该完成初始化BSW模块,完成软件架构的初始化进程
ECU状态管理器应提供在ECU状态之间的每次转换时执行外部静态配置代码的能力。
ECU状态管理器应提供进入逐级递减功率模式的机制。
ECU状态管理器应包括一个评估保持在RUN状态的条件的机制。
应支持所有SW组件同步。
ECU状态管理器应提供请求和释放POST-RUN状态的服务。
保持在POST-RUN状态的条件。ECU状态管理器应评
部分唤醒
应支持唤醒睡眠操作
执行有限的任务
快速ShutDown
6.3.4 灵活状态
正常运行
EcuM应处理基本软件模块的初始化。
ECU状态管理应提供两个关闭ECU的目标。
Off
Reset
时钟模块
应提供一个供本地SW-C使用的持久性时钟
当ECU供电时,时钟应处于活动状态
在启动的情况下,所有的时钟将被取消。
连续请求应只尊受最早到期的报警。
时钟服务应允许设置相对于当前时间的时钟,时间分辨率为秒。
时钟服务应允许使用分辨率为秒的绝对时间来设置时钟绝对时间。
时钟服务应允许设置时钟
ECU状态管理器应提供报警时钟服务,允许检索时钟值
多核
有一个函数EcuM_Init的ID,用于区分不同的内核
RTE Statt 应在每个核心上被调用。
状态变化应是ECU全局的
要shutDown,shutdownAllCores应在同步所有内核后,在主内核上调用。
唤醒事件的验证和处理应在本地完成。
6.4 Watchdog Manager
参见AUTOSAR_SRS_ModeManagement.pdf
6.5 Communication Manager
参见AUTOSAR_SRS_ModeManagement.pdf
6.6 Basic Software Mode Manage
参见AUTOSAR_SRS_ModeManagement.pdf


















 7559
7559

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











