







HWA最基本功能包括智能跟车、拨杆变道、压速变道、车道居中保持等功能,有效减轻驾驶疲劳。随着智能驾驶不断走向成熟,HWA升级到高速自动驾驶HWP,可实现智能避让汇入口、智能避让大车、分心/疲劳监测、智能进出匝道、智能判别易混分叉路口、智能变道保护六大功能。
根据ICAP基础行车辅助驾驶测试内容来看,共包括6方面核心能力:
必测项:包括跟车能力、组合控制能力、紧急避险能力和驾驶员交互;
增测项:包括主动换道能力、连续运行能力。
当行车速度低于HWA/HWP作用速度后,自动进入TJA/TJP功能控制。
HWA遵循法律法规
E-NCAP Highway Assist Systems;
Traffic Jam Assist,参考;
08-《中国智能网联汽车技术规程(C-ICAP)》(2024版)管理规则:


HWA系统组成
传感器
单摄像头
智能摄像头,加入了芯片,输出图像信息,车道线
单提像头+单雷达
摄像头输出图像信息
雷达输出点云信息
极坐标
输出雷达处理后的一些信息
输出雷达的一些功能,譬如DOW
单摄像头+单雷达+源光雷达
ADAS控制器
基于感知目标和车辆状态信息输出车辆显示及控制相关信息。
感知信息处理
外部环境和本车运动状态监测
图像到目标
点云到目标
感知与预测
目标融合
车道线融合
地图导航与定位
车道
道路
未来目标及EGO车辆状态预测
行为规划
路径生成与决策
控制
纵向控制
横向控制
报警显示
BSW
AutoSAR架构,AP:SOA;CP
刷写:Boot OTA
通信
诊断
诊断服务
DTC内外部诊断
网络管理
电源管理PMM
信息安全
时间同步
XCP
Universal Measurement and Calibration Protocol
硬件接口
内核故障及自检
SPI通信
控制器核心硬件
SOC/MCU,国产
其他组件
参见ACC、LCK系统
HWA功能场景
定义流程
定义功能
确定涉及系统
外部系统
镜头
毫米波雷达
轮速传感器
IMU
制动主缸压力传感器
车辆状态信息
ESC
EPS
BCM
HMI
内部系统
感知融合
预测规划
控制&执行
定义系统使用场景
确定子系统
定义子系统使用场景
驾驶员输入
车辆上电
功能开启
功能关闭
速度调整
跟车距离调整
功能取消开关
功能抑制或取消
激活功能过程中场景
无车道线无路沿
激活纵向ACC功能
条件满足后纵向功能激活
无车道线有路沿
激活HWA功能
有车道线有路沿
激活HWA功能
功能激活后
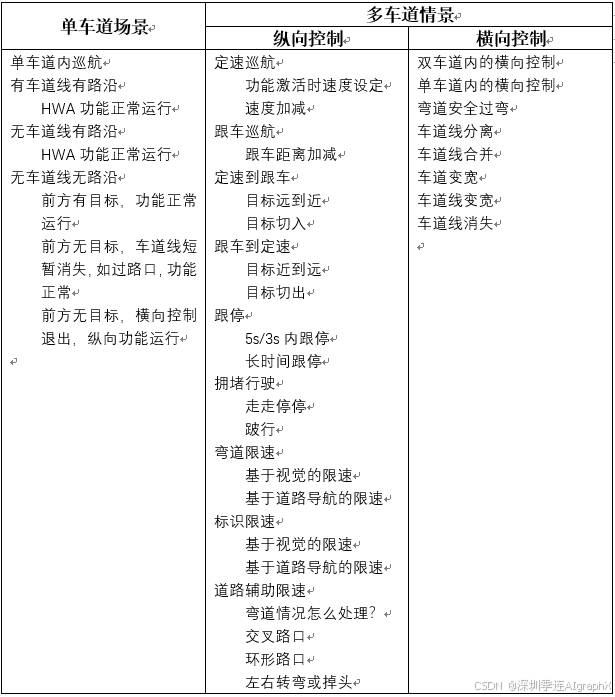
单车道内巡航
有车道线有路沿
HWA功能正常运行
无车道线有路沿
HWA功能正常运行
无车道线无路沿
前方有目标,功能正常运
前方无目标,车道线短暂消失,如过路口,功能正常
前方无目标,横向控制退出,纵向功能运行
纵向控制
定速巡航
功能激活时速度设定
速度加减
跟车巡航
跟车距离加减
定速到跟车
目标远到近
目标切入
跟车到定速
目标近到远
目标切出
跟停
5s/3s内跟停
长时间跟停
拥堵行驶
走走停停
跛行
弯道限速
基于视觉的限速
基于道路导航的限速
标识限速
基于视觉的限速
基于道路导航的限速
道路辅助限速
弯道情况怎么处理?
交叉路口
环形路口
左右转弯或掉头
横向控制
双车道内的横向控制
单车道内的横向控制
弯道安全过弯
车道线分离
车道线合并
车道变宽
车道线变宽
车道线消失
功能退出
横向控制退出
整个功能退出
系统故障
HWA系统开发功能场景设计


















 1431
1431

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言











