






参考链接
1、官网,介绍了using ros控制器,分为官方标准控制器( standard ROS controller)和自定义控制器(custom ROS controller)的使用,对于自定义控制器的官方解释如下:

2、官网2介绍了ros端的webots_ros包的安装,和自带ros节点的例子,webots_ros包:https://github.com/cyberbotics/webots_ros
3、博主zhangrelay对官方文档的翻译,进行了详细的介绍。
4、博主图契图卡在ros中实现了自定义c++节点
youtube教学视频,主要采用了官方模型与官方自带的控制器。
已有条件
ubuntu16.04,ros kinetic,webots2020a,webots机器人模型及环境。
首先我们要明确控制架构,webots主要是由两部分组成:控制器(controller)+仿真环境(world+model),通过ros节点发送指令,机器人上面的ros控制器接受指令,控制机器人运动,因此两方面的工作需要做:ros节点和ros控制器。
下图是webots一个项目中的文件夹。
- 仿真环境
仿真环境中其自带的模型非常多,但有时候我们需要用自己的机器人,这时候可以通过将urdf文件转换为proto文件,从而加载进world,具体参考我另一篇博客。 - 控制器
webots功能主要集中在控制器,因为webots主要是用来实现规划算法,支持许多语言。
第一步,ros控制器
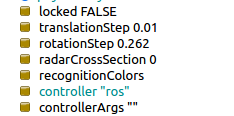
这里我已经搭载好一个简易的二自由度模型,配置好了电机、碰撞属性和物理属性:

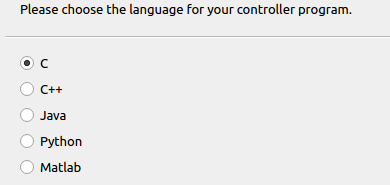
然后可以配置控制器了,官方已经配置了ros控制器接口,在控制器选择中,左下角点击选择,然后选择ros,这表明我们已经在机器人上配置好了ros控制器接口。

配置好:
第二步,ros节点
1 官方的模型官方的节点
将模型配置ros控制器,可以利用官方自带的ros节点控制机器人了。只需要启动roscore,启动仿真,确保连接上ROS master,然后rosrun 包名 节点名即可,下图是运行的pioneer3at示意图:

2 自己的模型自己的节点
建立ros节点应当要建立工作空间
mkdir -p example_ws/src
cd example_ws/src
catkin_init_workspace
为了获取webots支持ros的依赖等配置文件,将webots安装路径(默认应该是在/usr/local/webots/projects/languages/ros,可以通过cd ${WEBOTS_HOME}/projects/languages/ros找到)的webots_ros文件夹拷贝至之前建立的工作空间下的src文件夹下,然后同理将相关通信格式文件拷贝到webots_ros下面。
也可以通过下列指令:
cp -r ${WEBOTS_HOME}/projects/languages/ros/webots_ros .
cp -r ${WEBOTS_HOME}/projects/default/controllers/ros/include/srv webots_ros/
cp -r ${WEBOTS_HOME}/projects/default/controllers/ros/include/msg webots_ros/

catkin_make一下,
但我需要编写自己的ros节点,控制这个两自由度机器人。因此创建自己的node(c++)文档,并在CMakelist中添加依赖和链接:
add_executable(example src/example.cpp)
add_dependencies(example webots_ros_generate_messages_cpp)
target_link_libraries(example
${catkin_LIBRARIES}
)
source一下
source ~/example_ws/devel/setup.bash
rosrun即可
仿真结果:
 视频:
视频:
webots与ros联合仿真-自定义模型与ros节点通行
报错情况:
 若出现错误:Failed to call service set_velocity on motor 1。
若出现错误:Failed to call service set_velocity on motor 1。
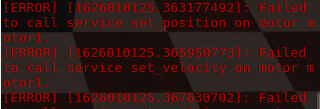
call不成功
参考博客需要配置:

模型+自定义控制器+ros节点
参考官网对于自定义控制器的解释,需要建立一个包,处理来自 ROS 的“catkin_make”(CMakerlist)和来自 Webots 的“Makefile”,以便将生成的二进制文件链接到 Webots 的“libController”和“roscpp”库。此处示例
需要明确的是,控制器为一个可执行文件,即c++文件,通过编译、链接等一系列操作生成的,因此,整体思路便是,编写一个c++文件,整合ros与webots,通过共同的编译规则,生成一个可执行文件(控制器)即可。
对于c++编译规则不太懂,只感觉makefile比较复杂,因此,采用cmakelist的编译规则。
-
第一步,建立ros工作空间,包,和节点,建立ros与webots的联系。这里我建立了一个listener节点用作控制器,引入webots相关头文件,这里只用了motor,用到什么引入什么。
`#include <webots/Robot.hpp> #include <webots/Motor.hpp>` -
第二步,编辑ros功能包对应的cmakelist文件,添加依赖和链接库,特别注意链接库这块,ros必须依赖
${catkin_LIBRARIES},没有引用会报关于ros的未定义的引用的错,而webots依赖${LIBRARIES},因为在ros节点中引用了webots,所以需要链接${LIBRARIES},不然会报错:关于webots的未定义的引用。add_dependencies(ros_talker_controller ros_controller2_generate_messages_cpp) target_link_libraries(ros_talker_controller ${catkin_LIBRARIES} ) add_executable(ros_listener_controller src/ros_listener_controller.cpp ) add_dependencies(ros_listener_controller ros_controller2_generate_messages_cpp) target_link_libraries(ros_listener_controller ${catkin_LIBRARIES} ${LIBRARIES} )另外,cmakelist是编译规则文件,因此,要将webots相关的编译、链接,结合到ros节点里面去,还需要在文档中添加链接路径等:
if(NOT CMAKE_CONFIGURATION_TYPES AND NOT CMAKE_BUILD_TYPE) set(CMAKE_BUILD_TYPE Release) endif() link_directories($ENV{WEBOTS_HOME}/lib/controller) set (LIBRARIES ${CMAKE_SHARED_LIBRARY_PREFIX}Controller${CMAKE_SHARED_LIBRARY_SUFFIX} ${CMAKE_SHARED_LIBRARY_PREFIX}CppController${CMAKE_SHARED_LIBRARY_SUFFIX} ) set(EXECUTABLE_OUTPUT_PATH ../) include_directories($ENV{WEBOTS_HOME}/include/controller/c $ENV{WEBOTS_HOME}/include/controller/cpp ./include /usr/local/include/eigen3) include_directories( include "/usr/include/eigen3" $ENV{WEBOTS_HOME}/include/controller/cpp $ENV{WEBOTS_HOME}/include/controller/c ) -
第三步、编译、找到devel下的listenerl可执行文件,将其拷贝至控制器目录下,用作控制器。我是在回调函数中将接收数据,设置恒定速度控制。回调函数主题:
while (robot->step(timeStep) != -1) { m1->setPosition(INFINITY); m2->setPosition(INFINITY); m1->setVelocity(msg->x); m2->setVelocity(msg->y); }; delete robot; }另外,main函数主体:
ros::init(argc,argv,"listener"); ros::NodeHandle n; ros::Subscriber sub = n.subscribe("gps_info", 1,gpsCallback); ros::spin();搭配好控制器之后,应该显示控制器加载完成:

-
第四步,roscore,source,rosrun启动自定义ros控制节点,我这里是建立的话题发布者talker,发布一系列值。控制器接收到指令,开始以恒定速度控制电机转动。到这里我们就实现了自定义模型+自定义控制器+自定义ros节点控制,有了这些基础(ros通信与自定义控制器),接下来就可以设计、封装控制器,尝试更多的控制算法了!!!

视频:ros+webot联合仿真,自定义控制器与ros节点















 296
296











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









