







报错: ERROR: file couldn’t be opened. ERROR: there is no robot in the file.
注意urdf模型文件要放在全英文路径下即可。
第一步,下载sw2urdf插件
介绍:http://wiki.ros.org/sw_urdf_exporter
下载:https://github.com/ros/solidworks_urdf_exporter/releases
第二步,打开solidworks,找到工具,插件,勾上

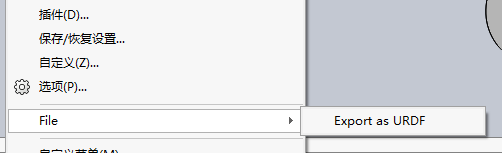
第三步,在工具->file中打开sw2urdf面板
第四步,建立坐标系,旋转轴,坐标系统,在插件中配置好。
注意,在这一步遇到困难,模型散架了。两点原因:
1 ,sw2018bug,不能导入相同模型(不是名字),所以相同模型要修改一点点。
2 ,导入子装配体,坐标系较乱,建立坐标系的时候一定要参考全局装配体,先插入各轴参考旋转轴(z轴),再建立参考平面,线面相交确定原点,然后指向公垂线确定x轴,这样坐标系i就与关节i还有连杆i固连了。这个坐标系就是导出urdf的初始位置。
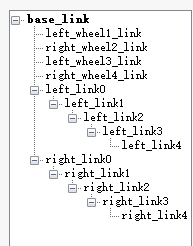
一定是这样的形式:连杆0-关节1-连杆1-…-关节n-连杆n。

第五步,确定参数。点击Preview and Export。
确定关节属性,一般在第四步已经设置好parent、coordinates和axis,这里默认就好。我这里名字有点修改。

点击next,确定连杆属性,包括惯性矩,可视化和碰撞体属性

点击导出urdf and meshes 即可,一定要记住导出在纯英文路径下。
第六步,导入到coppeliasim

找到刚刚那个路径,导入urdf即可。
最新错误
vrep4.0,导入双臂时,左右两臂不能同时恒定速度控制,只有一个臂正常。
在没有设置loop(pid)时,设置enable motor,设置最大力矩很大,速度10rad/s,但不能恒定速度控制,只有速度超过75,机械臂才能越过最高点,已经排除重力、摩擦、碰撞体干涉的原因,发现双臂机械臂自由度的差在2及以上,才能同时恒定速度控制,尚不知道原因。
导入ros,利用moveit_setup_assistant配置
前面导出urdf文件时,随之产生了display与gazebo两个launch文件,分别可以在rviz和gazebo中显示机械臂,要控制机械臂动作,需要使用配置助手进行配置。
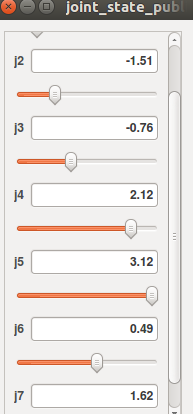
**注意:**在display,use_gui的参数中改为true就可以显示关节控制面板,此处注意!!!若是urdf文件中没有给定关节限位,则控制面板为空白,且后续moveit_setup_assistant也不能选择pose。
















 1417
1417











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









