







Ubuntu对应ROS的不同版本:
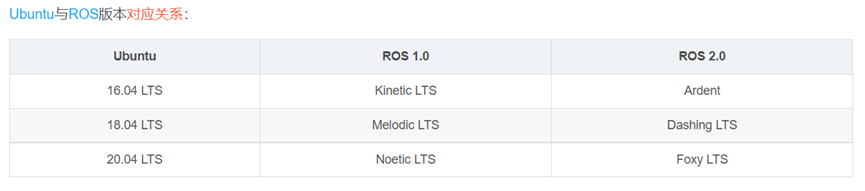
我的操作系统为Ubuntu 18.04 LTS 64bit应采用ROS版本为ROS Melodic。
下面以我的版本为例:
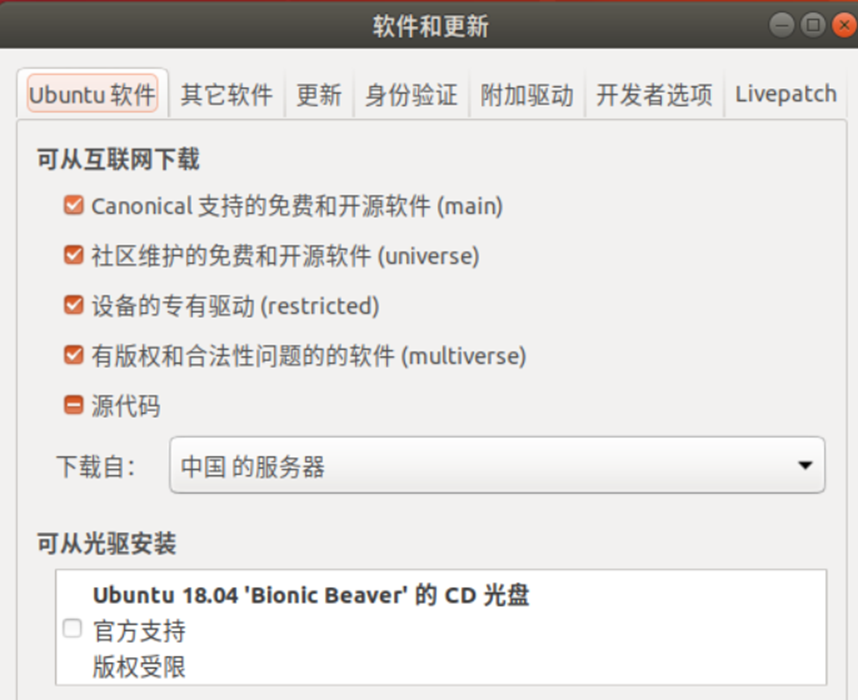
配置Ubuntu软件仓库
打开软件中心,按照下图进行配置。
确保你的"restricted", “universe,” 和 "multiverse."前是打上勾的:
设置sources.list
设置电脑以安装来自packages.ros.org的软件。
推荐就近选择一个镜像源,例如,Tsinghua University为:
sudo sh -c '. /etc/lsb-release && echo "deb http://mirrors.tuna.tsinghua.edu.cn/ros/ubuntu/ `lsb_release -cs` main" > /etc/apt/sources.list.d/ros-latest.list'

设置密钥
配置公网密钥,这一步是确保我们的系统认为这个路径是安全的,下载文件是没有问题的。不然下载的东西会立刻被清除掉。
sudo apt-key adv --keyserver 'hkp://keyserver.ubuntu.com:80' --recv-key C1CF6E31E6BADE8868B172B4F42ED6FBAB17C654

若无法连接到密钥服务器,可以尝试替换上面命令中的 hkp://keyserver.ubuntu.com:80 为 hkp://pgp.mit.edu:80 。
安装
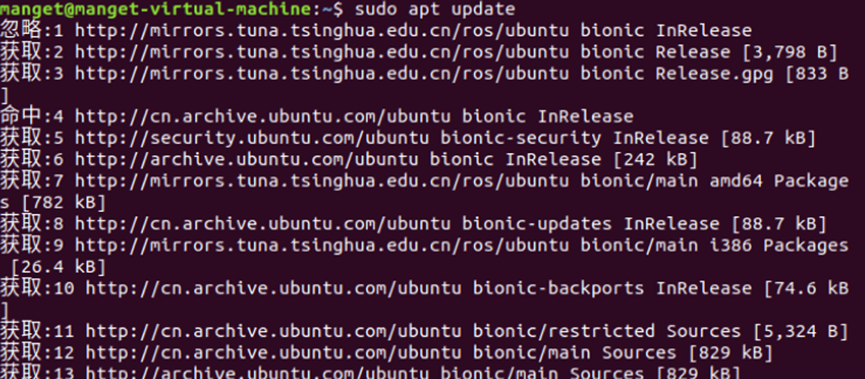
确保你的 Debian 包索引是最新的
使用sudo apt update查看
ROS 中有很多不同的库和工具,并提供了四种默认选项,也可以单独安装 ROS 的软件包。
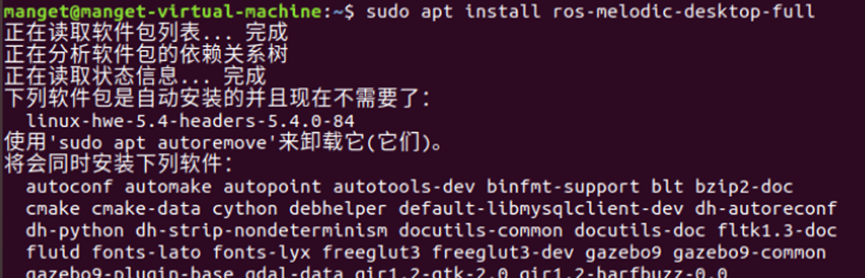
桌面完整版(推荐): 包含 ROS、rqt、rviz、机器人通用库、2D/3D 模拟器、导航以及 2D/3D 感知包。
sudo apt install ros-melodic-desktop-full
桌面版: 包含 ROS,rqt,rviz 和机器人通用库
sudo apt install ros-melodic-desktop
ROS-基础包: 包含 ROS 包,构建和通信库。没有图形界面工具。
sudo apt install ros-melodic-ros-base
单独的包: 你也可以安装某个指定的ROS软件包(使用软件包名称替换掉下面的PACKAGE):
sudo apt install ros-melodic-PACKAGE
如:sudo apt install ros-melodic-slam-gmapping
要查找可用软件包,请运行:apt search ros-melodic
这里,我安装的是桌面完整版。
安装完成后,可以用下面的命令来查看可使用的包:
$ apt-cache search ros-melodic


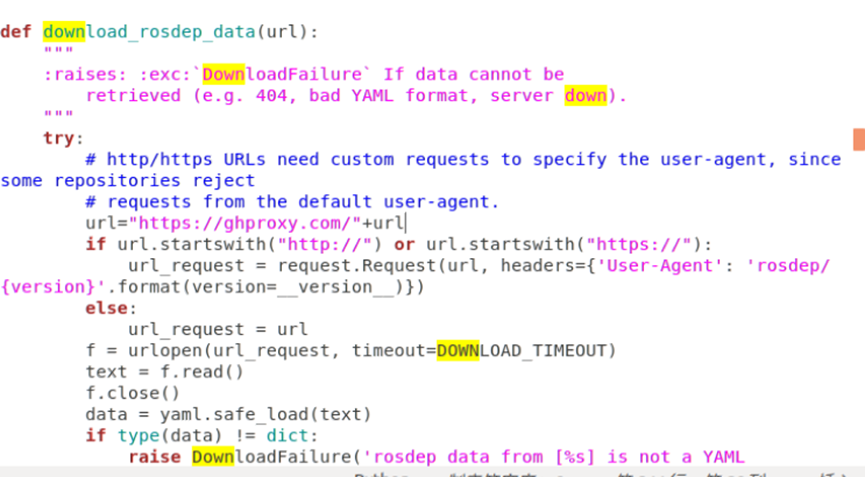
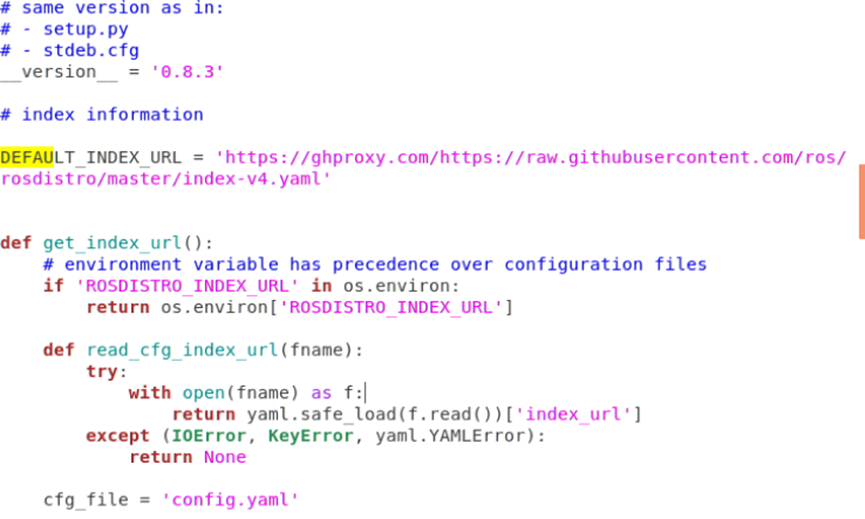
初始化 rosdep
在你使用 ROS 之前,需要初始化 rosdep。rosdep 让你能够轻松地安装被想要编译的源代码,或被某些 ROS 核心组件需要的系统依赖。
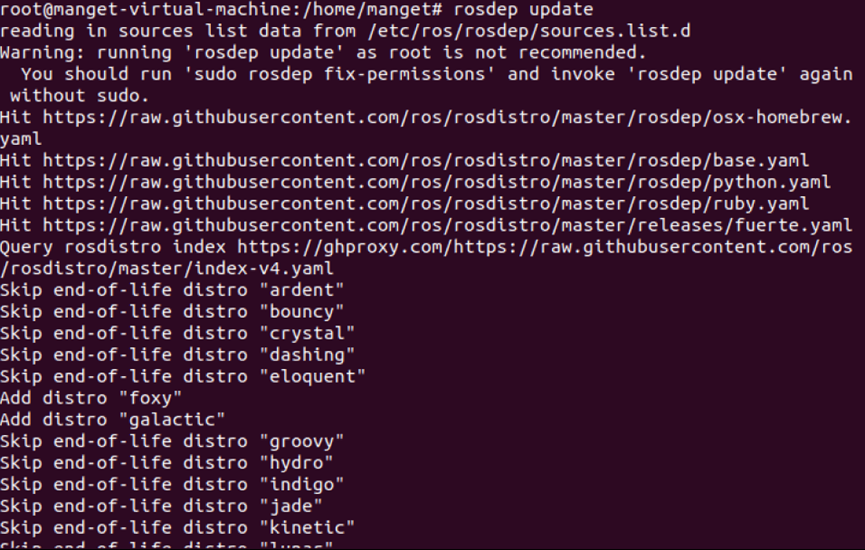
sudo rosdep init
rosdep update
rosdep update出错timeout
成功截图:

设置环境
将 ROS 环境变量自动添加到新 bash 会话会很方便:
echo "source /opt/ros/melodic/setup.bash" >> ~/.bashrc
source ~/.bashrc
如果你不只安装了一个 ROS 发行版, ~/.bashrc 只能使用你需要的 ROS 版本的 setup.bash 。
如果你只想设置当前 bash 会话的 ROS 环境变量,只需要输入:
source /opt/ros/melodic/setup.bash
如果你使用 zsh,那么你需要将上述命令改为:
echo "source /opt/ros/melodic/setup.zsh" >> ~/.zshrc
source ~/.zshrc
构建工厂依赖
到目前为止,你已经安装了运行核心 ROS 包所需的内容。为了创建和管理自己的 ROS 工作区,有各种各样的工具和需求分别分布。例如:rosinstall 是一个经常使用的命令行工具,它使你能够轻松地从一个命令下载许多 ROS 包的源树。
要安装这个工具和其他构建ROS包的依赖项,请运行:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential















 18万+
18万+











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









