







 本文介绍了AUTOSARCP架构,它通过三层软件分层(应用软件、运行时环境和基础软件)实现硬件独立性。重点讲解了虚拟功能总线和RTE的作用,以及AUTOSAR提供的标准化方法和模板,以促进汽车软件开发的协作和集成。
本文介绍了AUTOSARCP架构,它通过三层软件分层(应用软件、运行时环境和基础软件)实现硬件独立性。重点讲解了虚拟功能总线和RTE的作用,以及AUTOSAR提供的标准化方法和模板,以促进汽车软件开发的协作和集成。
相关介绍
AUTOSAR CP架构在最高抽象层上区分了在微控制器上运行的三个软件层:应用程序、运行时环境 (RTE) 和基础软件 (BSW)。
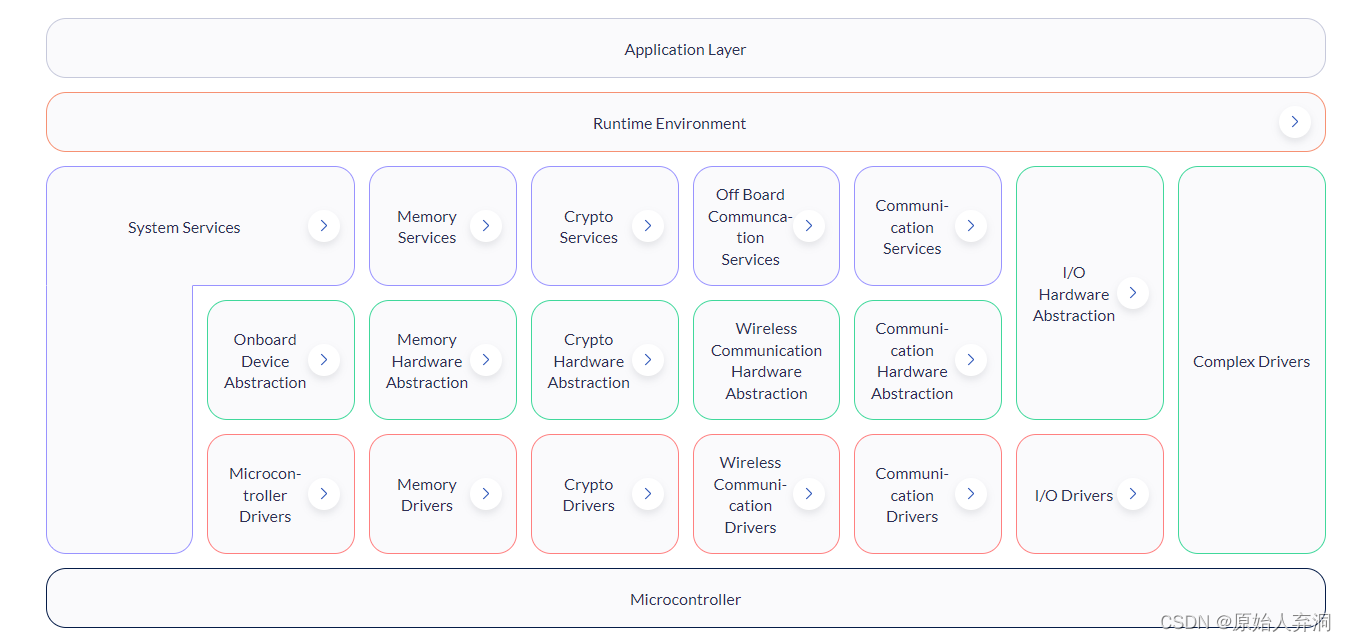
应用软件层大多与硬件无关。 软件组件之间的通信和对 BSW 的访问通过 RTE 进行。 RTE 代表应用程序的完整接口。 BSW 分为三个主要层和复杂的驱动程序:服务层、ECU(电子控制单元)抽象层和微控制器抽象层。 服务又分为功能组,代表系统、内存和通信服务的基础设施。
下图是具体的组件分布
最新版本是AUTOSAR Classic Release R23-11
概念
一个重要的概念是虚拟功能总线(VFB)。这个虚拟总线将应用程序从基础设施中分离出来。它通过专用端口进行通信,这意味着应用软件的通信接口必须映射到这些端口。VFB处理单个ECU内部和ECU之间的通信。从应用程序的角度来看,不需要详细了解较低级别的技术或依赖关系。这支持独立于硬件的开发和应用软件的使用。
AUTOSAR分层架构提供了软件和硬件独立性所需的所有机制。它区分了在微控制器(µC)上运行的三个主要软件层:应用层、运行时环境(RTE)和基础软件(BSW)。
不同汽车领域的应用程序通过RTE与基础软件接口。
除了定义架构和接口,AUTOSAR还定义了一种方法,可以配置完整的AUTOSAR堆栈,并增强不同工具链之间的互操作性。一方面,这对于开发项目内的协作很重要,另一方面,这对于降低开发成本很重要。
架构
标准化 ECU 软件架构的主要概念是通过软件抽象层 RTE(运行时环境)将独立于硬件的应用软件和面向硬件的基础软件 (BSW) 分离开来。在 RTE 的上层,该抽象层可用于开发针对 OEM 的竞争性应用软件。在 RTE 的下层,它实现了基本软件的标准化和 OEM 独立性。AUTOSAR 软件架构的其他特点包括 ECU 软件的可扩展性(适用于多个汽车系列和变型)、在 ECU 之间分配应用程序(功能软件模块)的可能性以及集成不同来源软件模块的能力。
AUTOSAR 软件架构中的基本软件进一步分为以下几层:服务层、ECU 抽象层和微控制器抽象层。RTE 实现了应用层与基础软件的分离,包括对这些层之间数据交换的控制。这为应用层上面向组件、独立于硬件的软件结构奠定了基础,软件组件(SWC)是独立的单元。由于它们独立于硬件,因此可以在不了解所使用或计划使用的硬件的情况下开发 SWC,也可以在开发过程中灵活地将现有的 SWC 移植到 ECU。
方法和模板
除了软件架构外,AUTOSAR 还为汽车软件开发引入了统一的方法。这主要是出于改善当今汽车项目中不同参与方之间合作的需要。
AUTOSAR 提供了一种方法,用于指定在 ECU 上集成软件组件以及通过各种不同的总线系统将不同的 ECU 集成到整个网络通信所需的所有方面。该方法定义了工作产品的活动依赖关系,预计将支持 AUTOSAR 中的活动、描述和工具使用。
描述(.arxml)基于 AUTOSAR 模板,该模板定义了正式的交换格式(AUTOSAR 模式)和与交换格式相关的语义约束。 这些描述用于保存在 AUTOSAR 方法中生成或消耗的信息。各种生成器可利用描述中的信息来支持 RTE 和 AUTOSAR 基本软件(包括操作系统)的配置和生成。

















 287
287

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









