







目录
启动ros节点时可能报错ImportError: cannot import name 'Sequence' from 'collections'
有错误或没说清楚的地方欢迎评论指正,我会修改的,谢谢大家
参考1:链接![]() https://blog.csdn.net/u013454780/article/details/133255733
https://blog.csdn.net/u013454780/article/details/133255733
安装驱动:
注册服务器公钥:
sudo mkdir -p /etc/apt/keyrings
curl -sSf https://librealsense.intel.com/Debian/librealsense.pgp | sudo tee /etc/apt/keyrings/librealsense.pgp > /dev/null安装https:
sudo apt-get install apt-transport-https
将服务器添加到存储库列表中:
echo "deb [signed-by=/etc/apt/keyrings/librealsense.pgp] https://librealsense.intel.com/Debian/apt-repo `lsb_release -cs` main" | \
sudo tee /etc/apt/sources.list.d/librealsense.list更新一下库
sudo apt-get update
安装librealsense2库
sudo apt-get install librealsense2-dkms
sudo apt-get install librealsense2-utils安装调试包
sudo apt-get install librealsense2-dev
sudo apt-get install librealsense2-dbg测试驱动
连上相机,测试一下
sudo realsense-viewer没有问题

安装ROS包
还是懒人版apt安装
sudo apt-get install ros-noetic-realsense2-camera
sudo apt-get install ros-noetic-realsense2-descriptionApt安装的ros包在系统中位置
/opt/ros/noetic/share/realsense2_camera测试ROS包:
roslaunch realsense2_camera demo_pointcloud.launch成功
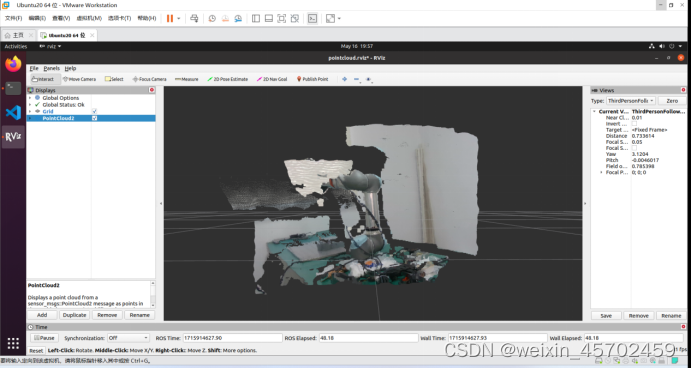
由于我只用了点云,所以消除畸变啥的没做,问就是懒(后续tips:内参标定做了之后该歪还是歪,白搞)。之后就是准备相机标定了。
启动ros节点时可能报错ImportError: cannot import name 'Sequence' from 'collections'
解决:
将报错的代码句子:
from collections import Sequence替换为:
from collections.abc import Sequence














 1万+
1万+

 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









