







前言
ABB伺服驱动器与西门子PLC1511T进行通讯
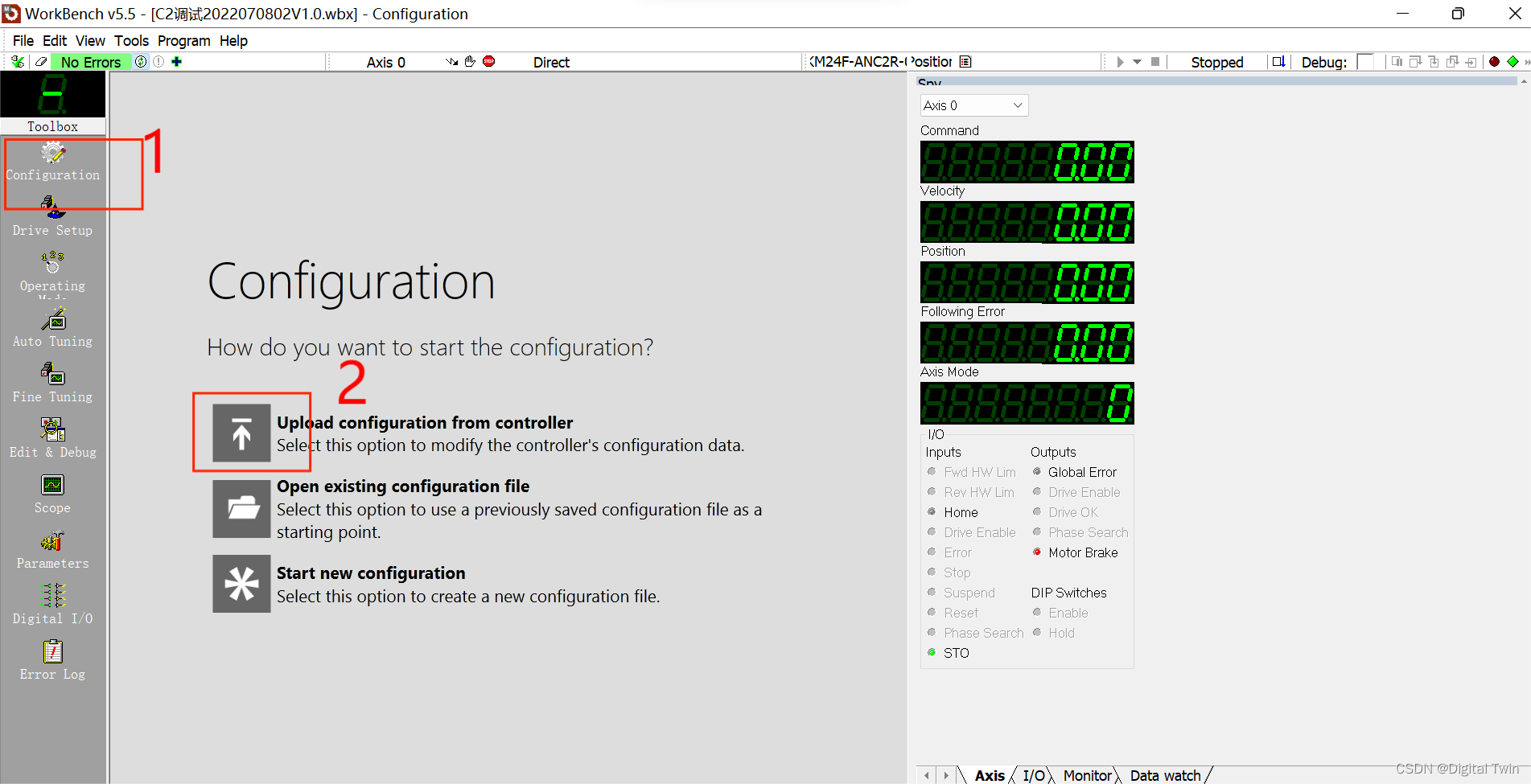
1.在工具栏中选择配置工具单击Configuration
2.单击上载配置参数按键
一、设置IP
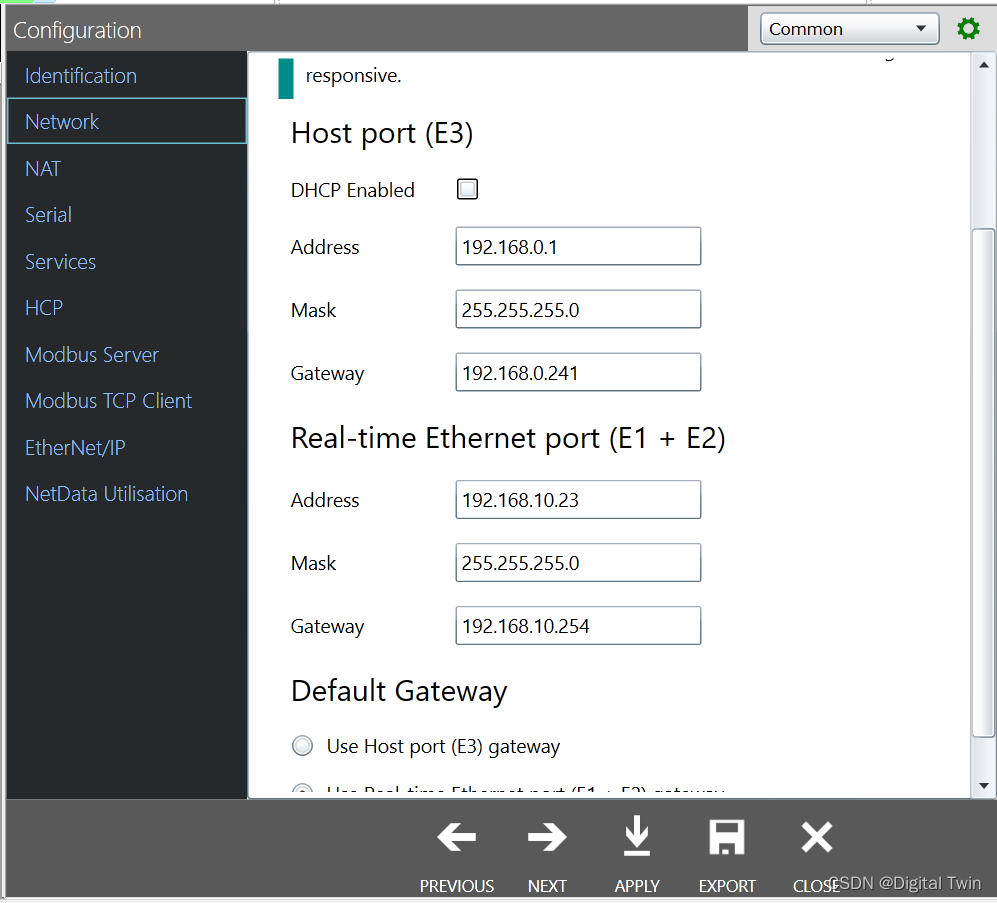
在线连接驱动器后
在弹出的配置界面中在左侧点击网络Network,
E3为调试端口默认设置
E1+E2实时总线端口设置为项目分配IP地址、适项目而定
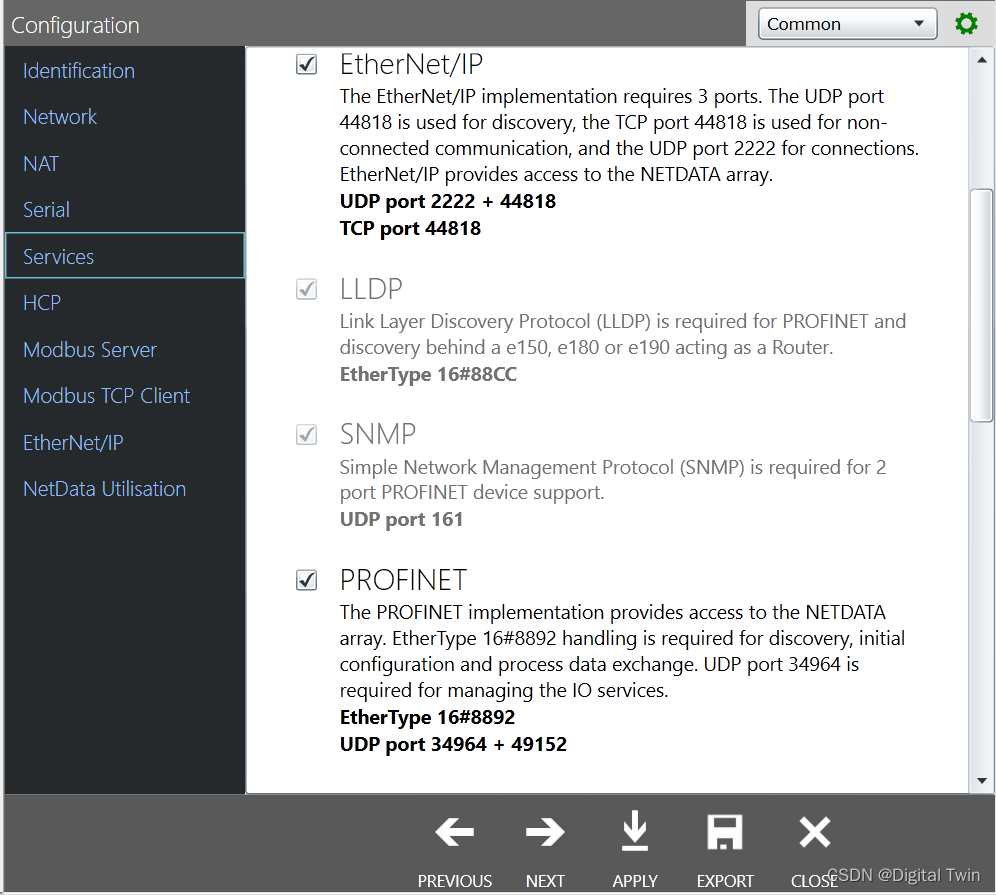
在工具栏中服务Services中勾选PROFINET及LLDP
此时完成网络配置,单击页面下方的APPLY应用,提示完成配置后单击CLOSE关闭配置对话框
二、配置抱闸输出
参考文档:
MTV065- ABB伺服抱闸功能介绍
https://abbdrive.yangben.io/#!/material/d0b58dbc68f2403f80b136ce65f7d411/assets/611cd37d707e0024f1d6f2bc
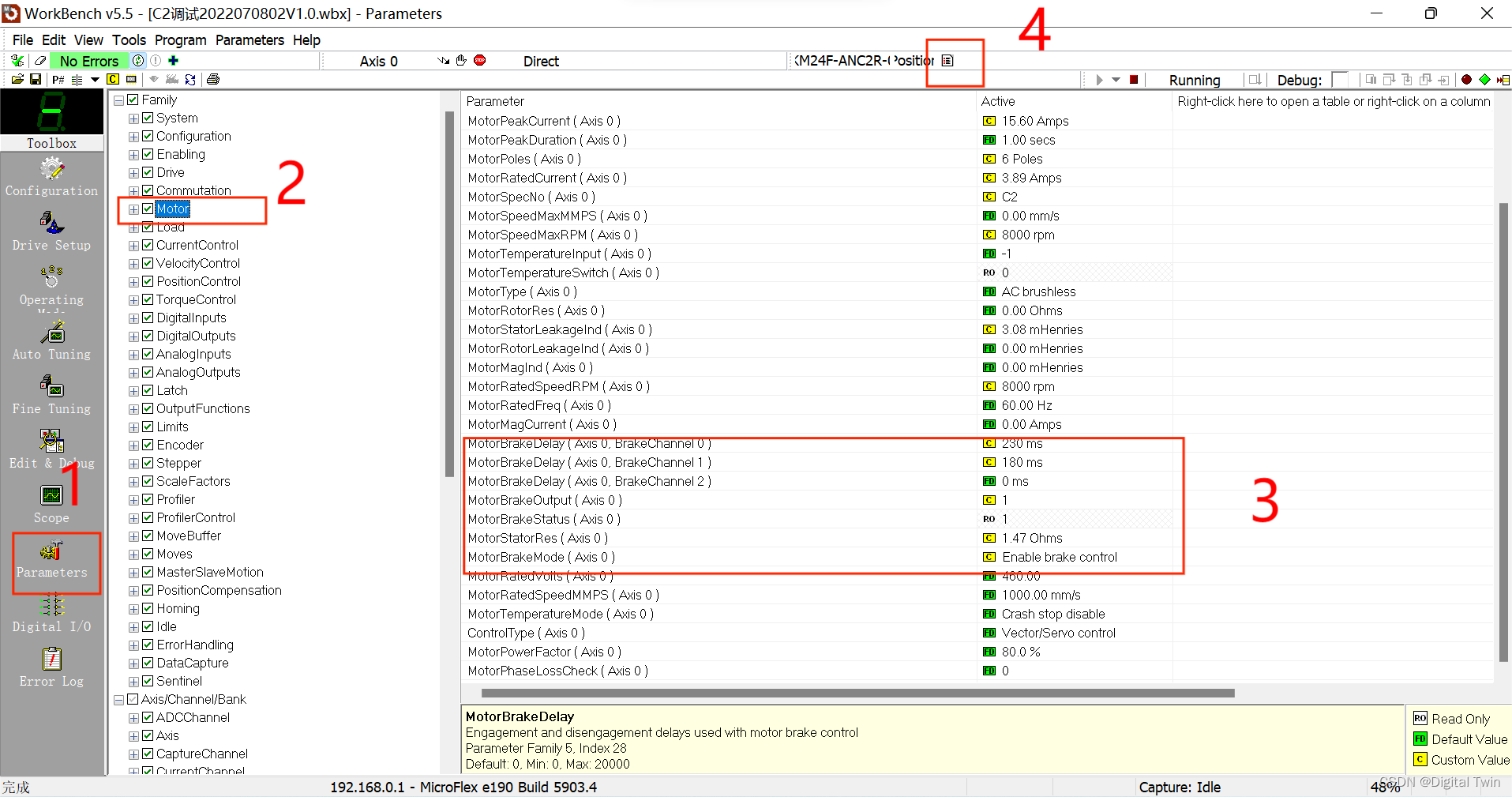
1.单击工具栏参数设置Parameters
2.在左侧列表中单击电机选项Motor
3.抱闸参数设置
Motor Brake Delay(Axis0,Channel0) 230ms 电机停止后关闭抱闸
Motor Brake Delay(Axis0,Channel1) 180ms启动励磁建立后打开抱闸
Motor Brake Delay(Axis0,Channel1) 0ms
Motor Brake Output 1 设定抱闸输出点位
Motor Brake Status 查看抱闸状态
Motor Brake Mode enable brake control激活抱闸控制模式
4.设置完成后点击数据保存按键,保存数据。
参数设置完成后,单击左侧工具栏中的数字输入输出Digital I/O
此配置界面采用拖拽配置方式,单击Low低电平输出并拖拽至OUT1完成配置
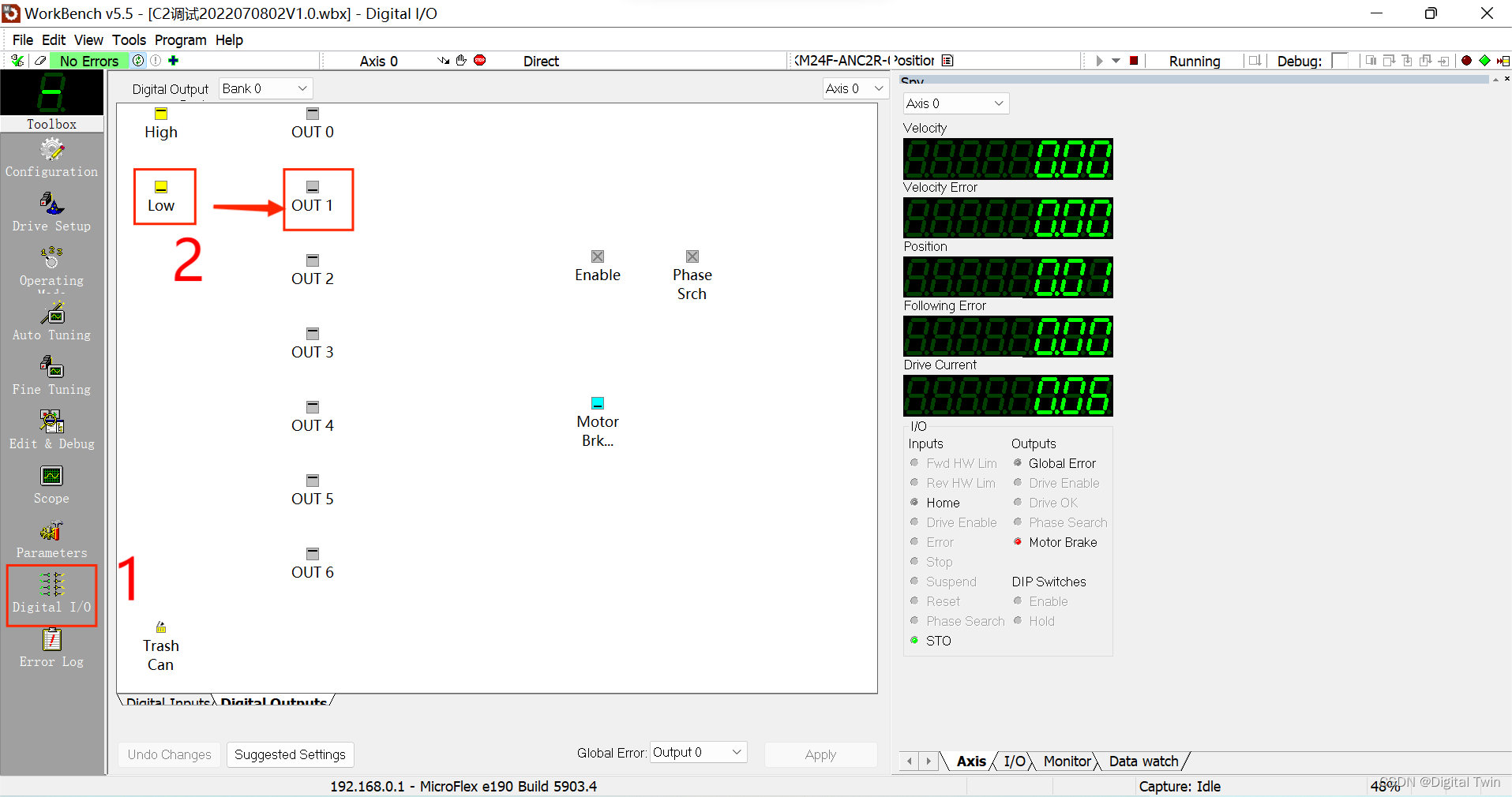
完成抱闸配置后需进行驱动器使能查看抱闸状态是否符合所需抱闸功能。
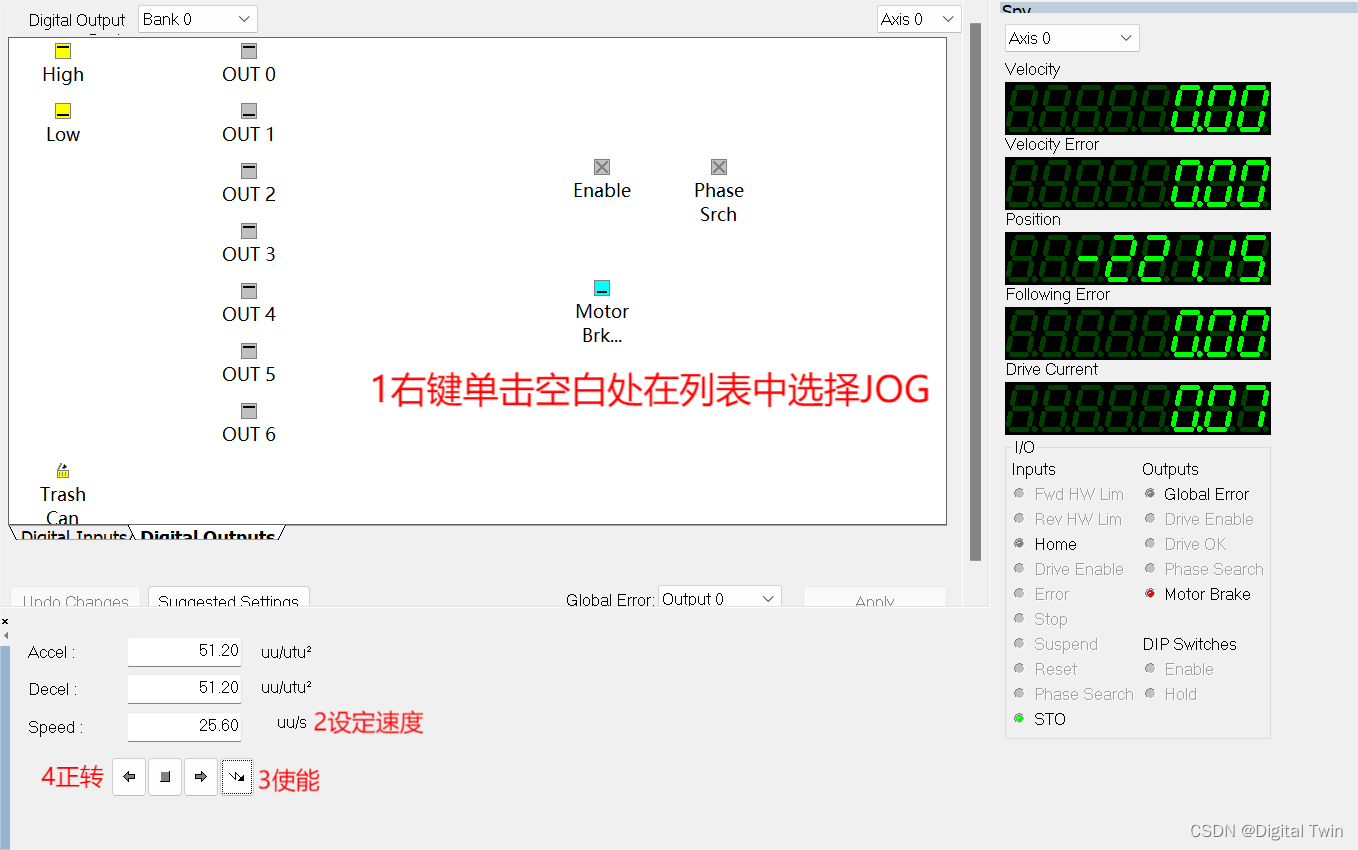
按照下图进行点动测试
三、与西门子1500进行PNIO通讯
总结
进行配置完成一定要记得下载数据至驱动,抱闸可在使能时查看状态。
















 3410
3410











 被折叠的 条评论
为什么被折叠?
被折叠的 条评论
为什么被折叠?
 到【灌水乐园】发言
到【灌水乐园】发言









